

【翻译】借助 NeoCPU 在 CPU 上进行 CNN 模型推理优化
本文翻译自 Yizhi Liu, Yao Wang, Ruofei Yu..
翻译:coneypo
这篇文章介绍了基于 TVM 改进的 NeoCPU 方案,在 CPU 上进行 CNN 模型推理优化;
与之对比是 Intel 的 OpenVINO 版本(2018.5 ,最新的是 2020.2),也是做模型推理优化工作;
TVM 深度学习编译栈希望针对不同的深度学习框架和硬件平台如 CPUs, GPUs 和 专用加速器 提供一个通用的软件栈(OpenVINO 针对于 Intel CPU,TensorRT 针对于 NV GPU)
尽可能高效率的将不同深度学习框架可以轻松的部署到不同的硬件平台上:
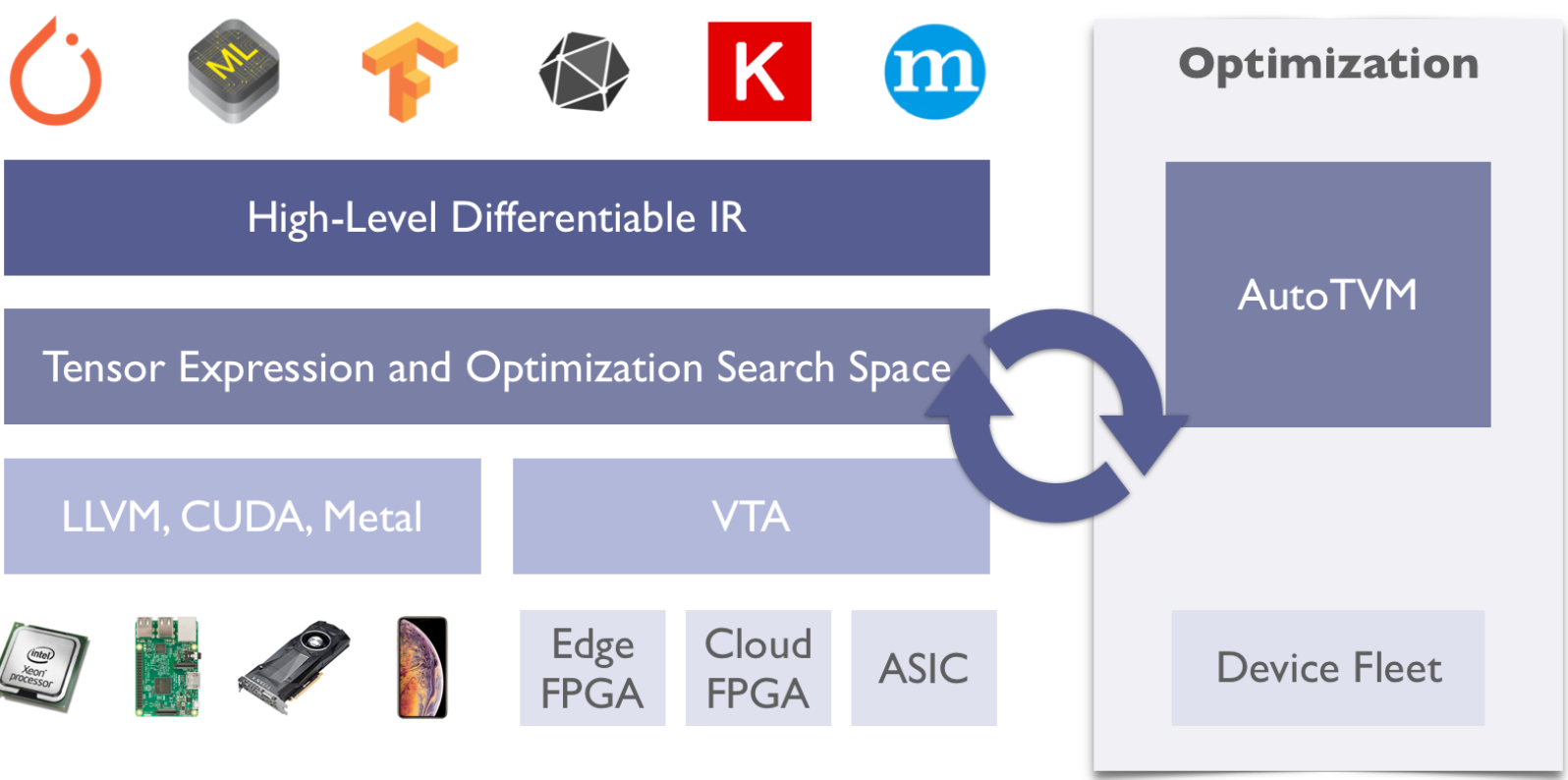
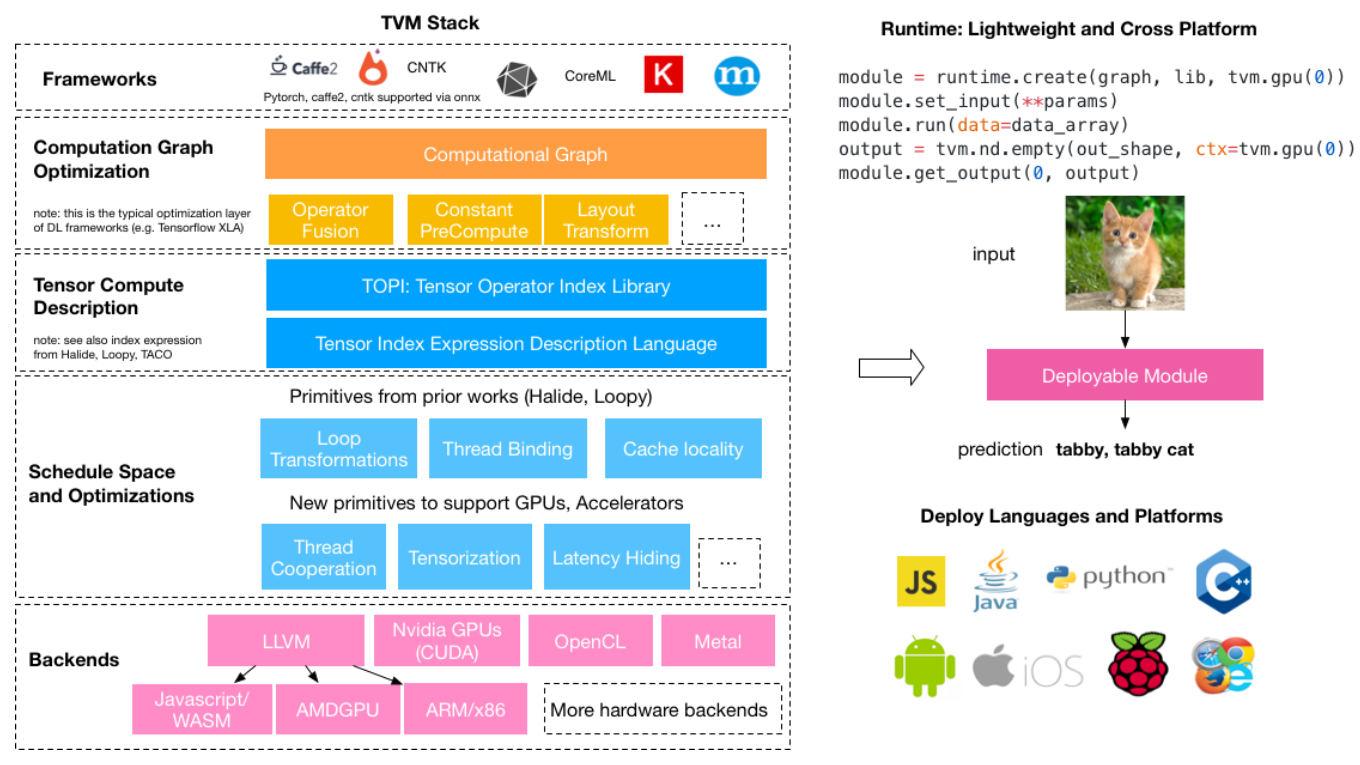
通过下面这张图,我们可以更好的看到 TVM Stack 做了什么工作:
Amazon 基于 TVM stack 中提出的一些计算图优化方式,加上一些自己提出的卷积过程优化方式,来对 CPU 上推理过程进行加速,提出了 NeoCPU ,并且在主流的 CNN 模型上获得了不错的加速效果;
摘要
CNN 的流行普及和 CPU 的大规模使用部署,使得如果我们能够提高 CPU 上进行 CNN 模型推演的性能,这将意义重大;
为了提高 CPU 上面的 CNN 推理性能,现有的方法比如: 在 MXNet 和 Intel OpenVINO,通常把模型视为一个计算图,然后使用高性能的库比如 Intel MKL-DNN 来实现图的优化操作;
尽管通过这些现有的库可以提高性能,但是由于 Local operation-level / 局部操作级别 的优化已经被预先定义,所以很难在图级别进行优化;
因此,整体上进行端对端的推理优化很受限制;
这篇文章介绍了 NeoCPU, 一种对 CPU 进行 CNN 模型推断的综合方法,采用了全栈式的系统优化方案;
NeoCPU 无需借助于第三方的库将操作优化为模板,通过操作和图像级别的联合进一步进行性能优化;
实验表明针对于 CNN 模型推理,相比于其他实现方法, NeoCPU 能够达到 3.45x 更低延迟;
1 介绍
CNN 模型在计算机视觉领域大规模使用,使得模型架构优化成为关键;
相似的,大规模在服务器端,客户端,边缘端部署 CPU,也使得 CPU 上进行优化意义重大;
所以如何在 CPU 上进行 CNN 模型推演的优化成为很多用户研究的重点;
CPU 上 CNN 模型性能的推演还有很大提升空间;
CNN 模型推演本质上就是进行执行 a computation graph consisting of operations / 一张由一系列操作构成的计算图;
在实际应用时,大家经常高性能的 kernel 库(比如 Intel MKL-DNN 和 OpenBlas)来提高 CNN 操作性能;
这些库一般输入目标数据形状(比如 2D 卷积),然后进行常规调用操作,但是这些库大多数情况下只关注于(大多数情况下是卷积)操作,而错过了在图级别进行进一步端对端模型推理的优化机会;
图级别的优化往往是交给深度学习框架,比如 TensorFlow 和 MXNet;
然而,图级别的优化,比如 operation fusion / 操作融合 和 data layout planning / 数据布局规划,往往因为已经在第三方库中被预先定义而被限制;
因此框架中的优化工作和 kernel 库中的优化相冲突,这使得有性能提升空间但是没有被发掘;
此外,不同的 CPU 架构会依赖不同的高性能库,把库和深度学习框架整合很容易出错,而且很耗费开发时间;
而且尽管这些库被高度优化过,它们是作为第三方的 plug-ins,这使得可能会和框架中其他的库引起冲突;
比如说 TensorFlow 原本使用 Eigen 库来处理 CPU 的计算,后来引入 MKL-DNN,所以运行 MKL-DNN 线程会和 Eigen 的线程导致资源争用,引起冲突;
所以这种 framwork-specific / 依赖框架 的方法,用于 CPU 上进行 CNN 模型推算是不灵活,麻烦而且效果不好的;
由于框架的限制,如何不引入框架(比如 framework-agnostic / 框架无关 method),来进行 CNN 模型推理性能的优化成为了很多人想要解决的问题;
最近,Intel 发布了一款通用的 CNN 模型推理引擎,称之为 OpenVINO 开发套件;
这款开发套件在 x86 平台的 CPU 进行计算机视觉任务的 CNN 模型优化,而且相比于单独使用深度学习框架,能够获得更好的性能;
由于 OpenVINO 也是基于 MKL-DNN 来进行调用操作,所以只能提供有限的 Graph-level / 图级别 的优化(比如 ngraph 中的操作融合);
因此 OpenVINO 进行优化对于大多数 CNN 模型意义不大;
基于之前的研究观察,我们得出这样的结论——“flexible end-to-end optimization / 灵活的端对端优化” 是进一步提高 CNN 模型推理能力的关键;
这篇文章中,我们建议使用 NeoCPU 方式进行 CPU 上 CNN 模型的优化;
NeoCPU 是全栈的和系统性的,其中包括操作界别和图像级别的联合优化,而不是依靠第三方高性能库;
在操作级别,我们利用成熟的技术来优化计算量最大的操作,比如模板中的卷积操作,适用于在不同 CPU 架构上跑不同负载,而且让我们可以在图级别灵活操作;
在图级别,除了常规的比如操作融合和推理简化,我们通过操纵数据布局流程来协调各个操作的优化,贯穿整个模型以获得最佳的性能表现;
总而言之,NeoCPU 通过一种灵活和高效的方式,进行端到端的优化,而现有的其他方式往往依赖于第三方库,需要进行性能调优;
NeoCPU 基于深度学习编译栈 TVM 进行一系列改进;TVM 让我们可以进行操作级别的优化,而不是依赖于第三方库,这使得我们很灵活的可以进行 operation-level / 操作级别 和 graph-level / 图级别 的整合;
然而,在 ARM CPU 上,只有一种对于特定类型数据,进行定制化的 operation-level / 操作级别 的优化;
在此之前,TVM 没有提供 operation-level / 操作级别 和 graph-level / 图级别 的联合优化功能;
除此之外,一些其他深度学习编译器比如 Tensor Comprehensions 和 Glow,它们都不是专注于在 CPU 上进行优化,或者对于 CPU 上优化的性能提升没有那么显著;
比如基于文章描述以及我们自己的实验,Glow 仅仅优化 CPU 中的单核性能,因此我们不建议采用这种方式;
表 1 总结了 NeoCPU 和其他优化方式的对比,在几种主流的 CPU 上优化性能结果表现不错;
| Op-level opt | Graph-level opt | Joint opt | Open-source | |
| NeoCPU | 支持 | 支持 | 支持 | 支持 |
| MXNet / TensorFLow | 第三方 | 有限的 | 不支持 | 支持 |
| OpenVINO | 第三方 | 有限的 | 未知 | 不支持 |
| Original TVM | 不完善 | 支持 | 不支持 | 支持 |
| Glow | 支持单核 | 支持 | 不支持 | 支持 |
这篇文章会介绍以下几点:
- 提供一种在不同主流 CPU (Intel, AMD 和 ARM)上的 operation- and graph-level joint optimization scheme / 操作级别和图级别的联合优化方案 来获取高性能的 CNN 模型推演性能,表现要好过目前的其他方案;
- 构建一种模板可以进行高效率的卷积,通过这种方式,可以灵活的在不同架构 CPU (x86 和 ARM)上进行卷积操作的优化,而不需要依赖于第三方高性能内核库;
- 设计一种全局的方案,在一个 CNN 模型中的不同操作组合中,寻找最优布局方式,在保证高性能的同时,减少操作之间数据布局转换带来的开销;
值得注意的是,本文主要考虑 direct convolution computation / 直接卷积运算,NeoCPU 也兼容在其他计算密集型内核上的优化工作,比如通过 Winograd 和 FFT 进行卷积;
用 15 种主流的神经网络进行测试,我们在 x86 和 ARM 架构的 CPU 上进行了 NeoCPU 的评估,NeoCPU 的表现出色:
- 在 Intel Skylake CPU 上,15 种中 13 种最优;
- 在 AMD EYPC CPU 上,15 种中 14 种最优;
- 在 ARM Cortex A72 CPU 上,15 种中 15 种最优;
值得注意的是,在 x86 CPU 上,Intel 利用 Intel MKL-DNN 进行调优,而对于 AMD 的 CPU 优化程度很低;
选择 framework-specific / 指定框架(比如 MXNet 和 TensorFlow)和 framework-agnostic / 框架无关(OpenVINO)的解决方案,往往在某一种情况下表现突出,而在另一种情况下表现较差;
而 NeoCPU 在不同架构的 CPU 上的表现十分的均衡高效;
除此之外,NeoCPU 提供一个小尺寸的独立模块,不依赖于框架或者高性能内核库,可以在不同平台上轻松部署;
NeoCPU 在 Amazon 的 SageMaker Neo Service 上部署使用,使得模型开发者可以在基于 CPU 的云端服务器和边缘端设备进行推算优化;
已经有很多应用开发者在借助 NeoCPU 在不同平台上进行 CNN 模型的部署推算优化;
所有的源码都在 TVM 的开源项目中进行发布;
这篇文章剩下部分介绍如下内容:
- 第二章介绍了现代 CPU 的背景和典型的 CNN 模型;
- 第三章介绍了我们提出的优化思路以及如何实施;
- 第四章介绍了对于该方案的评估;
- 第五章介绍了相关工作;
- 第六章总结;
2 背景
2.1 现代 CPU
尽管加速器比如 GPU 和 TPU 在深度学习中表示出色,但是很多深度学习的计算工作,尤其是 model Inference / 模型推理,是在 CPU 上进行的;
如今,大多数 CPU 都是 Intel 或者 AMD 的 x86 架构,与此同时 ARM 的 ARM CPU 占据了嵌入式和移动设备市场;
制程工艺的提升,晶体管尺寸不断变小,使得我们可以制造出更大规模和更复杂的处理器,借此 CPU 通过增加核心数来实现和提高并行计算能力;
在一个多核处理器上,要避免不同线程之间的干扰至关重要,最小化线程间的 synchronization cost / 同步损耗;
在处理器内部,一个单个物理核通过 SIMD (single-instruction-multiple-data,单指令多数据流) 技术来达到最高性能;
SIMD 将多个值加载到 wide vector registers / 宽向量寄存器,然后一起处理;
(* SIMD 是一种采用一个控制器来控制多个处理器,同时对一组数据(数据向量)中的每一个分别执行相同的操作,从而实现空间上的并行性的技术;)
比如 Intel 提出了 512-bit Advanced Vector Extension instrcution set (AVX-512),在每个 CPU 循环周期,处理 16 个 32 位单精度浮点数(总共 512 位);
AVX2 在 256 位的寄存器中处理数据;
除此之外,这些指令集利用 Fused-Multiply-Add (FMA) 技术来执行向量化的乘法,然后在同一个 CPU 循环周期中,将累加结果存储到另一个向量寄存器中;
类似于 SIMD 的技术也被集成在 ARM CPU 和 NEON 上;
我们希望能够找到一种在 x86 和 ARM 的架构 CPU 上通用的优化方式;
除此之外,值得注意的是,如今大多数服务器端的 CPU 通过 simultaneous multi-threading (SMT) 技术,支持 hyper-threading / 超线程 技术;
这样的话在一个物理核上可以有两个虚拟核,用来提高系统吞吐量;
然而超线程对于性能的提升取决于应用程序;
在我们的案例中,我们不使用超线程,因为一个线程会占用对应物理核心的资源,如果在同一个物理核上再开一个线程,会造成性能下降;
我们还会通过共享内存模式 (典型 CNN 模型推理中的系统设置)来限制我们的优化在处理器内;
Non-Uniformed Memory Access (NUMA) / 非统一内存访问 不在本文讨论范围之内;
2.2 Convolutional neural networks / 卷积神经网络
Convolutional neural networks (CNNs)/ 卷积神经网络 在计算机视觉任务中大规模使用;一个 CNN 模型经常被抽形成一个 computation graph / 计算图;
本质上计算图就是 Directed Acyclic Graph (DAG) / 有向无环图 ,一个节点代表一个操作,一个从 X 连到 Y 的线表示操作 X 输出,然后输入到操作 Y);
执行一个模型推理实际上就是在计算图中输入数据,然后得到输出;
进行图的优化(比如 prune unnecessary nodes and edges / 删除多余节点,pre-compute values independent to input data / 预计算值独立于输入数据)可以提高模型推算性能;
CNN 模型推理中的中的绝大多数计算工作,是在 convolutions (CONVs) / 卷积;
这些操作本质上完全可以利用 CPU 中的并行化,矢量化和 FMA 特性;
已有的研究表明,通过对数据布局的优化调整,完全可以在 CPU 上进行卷积操作的优化;
剩下的挑战就是如何有效的管理数据流程,来让 CNN 模型推理获的高性能;
CNN 其余工作大多数都是卷积中和内存相关的操作(比如 batch normalization / 批量归一化,pooling / 池化,activation / 激活,element-wise addition / 逐元素添加 等等);
常规做法是将它们融入卷积操作,提高整体的算法复杂度,来提高性能;
CNN 模型的计算图训练本质上和推理没有区别,仅仅更大规模(加入了 backwards 运算)和一些计算上的琐碎运算(比如损失函数);
因此针对于 CNN 模型推理时的优化工作也可以用于训练;
3 Optimizations / 优化
这章我们会介绍我们的优化思路以及如何实现;
这篇文章中介绍的 CNN 模型推算优化方法是针对于 end-to-end / 端对端 情况;
我们的给出的方案,适用于大多数常见的 CNN 模型;
基本思路是把优化视为一个端对端的问题,然后寻找全局的最佳优化,也就是说,我们不关注于对于单个操作的优化;
为此,我们首先介绍如何利用可配置的模板,来进行 low-level computationally intensive convolution operations / 低层密集型卷积运算 的优化;
通过选择运算间适当的数据布局,来减少不必要开销,使得在一个特定 CPU 架构上,针对一个特定的卷积任务,找到最优实现方式更加灵活;
我们基于 TVM stack,在 compiling pass / 编译过程, operation scheduling / 操作调度 和 runtime components / 运行组件 加入了一些新特性来实现优化;
原生的 TVM stack 已经实现了一些图级别的优化(包括 operation fusion / 运算融合,pre-computing / 预运算 和 simplifying interfence for batch-norm and dropout / 归一化和丢弃的简化),这些在我们的项目中也进行了采用,但是在此不会去介绍;
3.1 Operation optimization / 运算优化
卷积运算的优化对于整个 CNN 任务性能的提升至关重要,因为卷积运算占据了整个运算过程中的大多数;
这是一个已经深入研究过的问题,但是以往的解决方法往往是在汇编代码层面去研究;
在这一节,我们会利用利用 CPU 的特性(SIMD,FMA,并行化等等)来针对单个 CONV 进行优化,而无需考虑繁琐的汇编代码和 C++ 代码;
通过全局的管理实现,会很容易的把我们的优化方式从单个运算拓展到整个计算图;
3.1.1 Single thread optimization / 单个线程优化
我们首先在一个线程中进行 CONV 优化;
CONV 操作计算量大,需要多次遍历操作数来进行运算; 因此管理输入到 CONV 的数据布局至关重要,是减少内存访问开销的关键;
我们首先回归到 CONV 运算本身来说明内存管理机制;
CNN 中一个 2D 的 CONV 输入 一个 3D 特征(高度 x 宽度 x 通道数)和 多个 3D 卷积核(通常比高度和宽度小,但是和通道数一样),输出另一个 3D 的 tensor / 张量;
计算过程在图 1 中进行说明(六个参数:in_channel, kernel_height, kernel_width, out_channel, out_height 和 out_width):
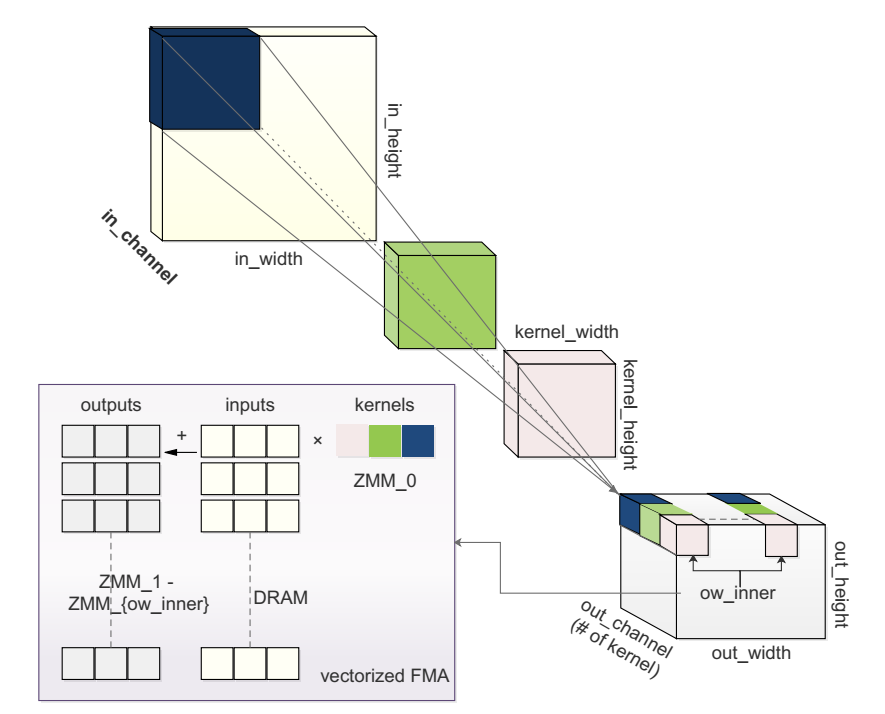
图 1 CONV 和 AVX-512 指令集中高效实现的例子;有三种分别涂成深蓝,绿色和粉色的核;为了能够高效的 FMA(Fused multiply-add),不同核的值被打包成一个 ZMM 寄存器,和不同输入值相乘,然后累加到不同的 ZMM 寄存器的输出值中;
卷积核在输入特征图上滑动,对应位置相乘求和,产生输出特征图中相应的元素,可以利用到 FMA;
卷积核的数目构成了 out_channel;
注意 in_channel,kernel_height 和 kernel_width 相互约束,不能被 embarrassingly parallelized / 高度并行化处理 ;
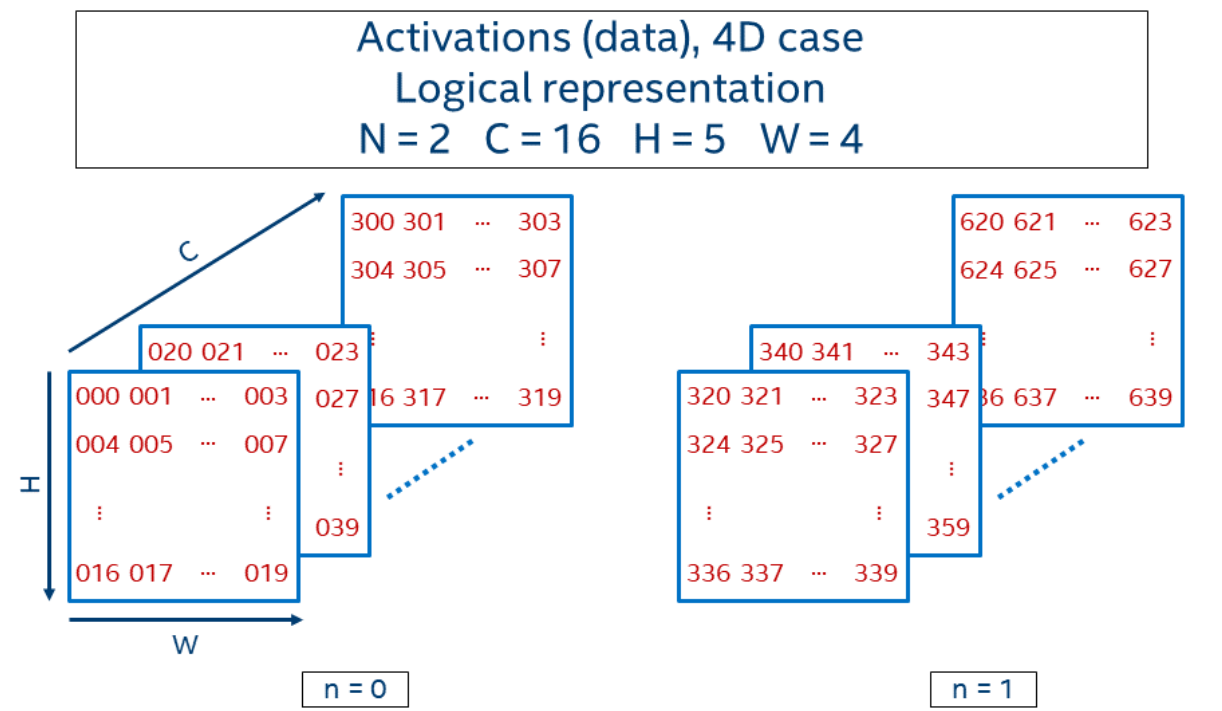
*补充图 NCHW 介绍:https://oneapi-src.github.io/oneDNN/understanding_memory_formats.html
我们使用传统的输入方式 NCHW (输入和输出是 4D 的张量,N:批次大小, C:通道数,H:特征图高度,W:特征图宽度)来描述我们默认的数据布局;
相关的卷积核是 KCRS(K:输出通道,C:输入通道,R:核高度,S:核宽度);
根据经验,我们将特征图的格式设置为 NHCW[x]c (c 是通道数 C 拆分出来的子维度,x 是子维度的分割大小);
比如 sizeof(c) = x,通道数 C = sizeof(C)x sizeof(c) 大小;
输出和输入一样格式: NCHW[y]c,这里分割因子可以不同;
对应地,卷积核是 KCRS[x]c[y]k,分割尺寸为 x 的 c 和分割尺寸为 y 的 k,是输入通道 C 和 输出通道 K 的子维度;
值得注意的是为了得到理想的布局,需要有大量数据转换的资源开销;
除了尺寸地重新排序,为了更好利用最新的向量指令集(比如 AVX-512,AVX2,NEON 等等),我们借助算数因子 reg_n 把 out_width 分成了 ow_outer 和 ow_inner,然后把 ow_inner 的循环移动到 register blocking 内部;
比如在一块支持 AVX-512 的 CPU 上,我们可以利用 32 x 512 位宽度的寄存器 ZMM0 - ZMM31 ;
我们保持这样的循环机制:一个 ZMM 寄存器存储 kernel 数据的同时,其他的寄存器存储特征图;
通过 AVX-512F 指令集,一个 ZMM 寄存器 中存储的 kernel 值(最高 512 bits,float32 x 16 个输出通道)被用来和 多个 DRAM 中连续不断的输入特征图 相乘,这些结果之后又会被累加存储到别的 ZMM 寄存器中;
图 1 说明了这种方法思路;
针对于其他向量化的指令,我们也可以用这种思路,但是需要改变 out_width (比如 reg_n)的 split factor / 分割因子;
算法 1 总结了我们在单线程中 CONV 的优化方式,本质上是:
- Dimension ordering for friendly memory locality / 优化布局格式来优化内存访问
- Register blocking for good vectorization instruction utilization / 寄存器阻塞以实现良好的矢量化指令利用率
然而不同于其他方式,我们在高级编程语言中,我们定义了一个 template,其中 block 尺寸(x,y),使用寄存器的数目(reg_n),和 loop-unroll strategy(unroll_key)很容易就可以配置;
所以根据不同的 CPU 架构(缓存大小,向量宽度等等)或者不同的任务(特征图大小,卷积核大小等等),我们可以进行计算逻辑的调整;
这样的话很灵活,也使得我们下一步进行图级别的优化成为可能;
算法1 :通过 FMA 实现 CONV 操作算法
PARAM: x > 0 s.t. in_channel mod x = 0
PARAM: y > 0 s.t. out_channel mod y = 0
PARAM: reg_n > 0 s.t. out_width mod reg_n = 0
PARAM: unroll_ker from {True, False}
INPUT: IFMAP in NCHW[x]c
INPUT: KERNEL in KCRS[x]c[y]k
OUTPUT: OFMAP in NCHW[y]c
for each disjoint chunk of OFMAP do > parallel
for ow.outer:=0 -> out_width/reg_n do
Initialize V_REG1 to V_REGreg_n by 0
for ic.outer:=0 -> in_channel / x do
for each entry of KERNEL do > (opt) unroll
for ic.inner:=0 -> x do
vload(KERNEL, V_REG0) > y floats
for i:=1 -> reg_n + 1 do > unroll
vfmadd(IFMAP, V_REG0, V_REGi)
end for
end for
end for
end for
for i:=1 -> reg_n + 1 do
vstrore(V_REGi, OFMAP)
end for
end for
end for
3.1.2 Thread-level parallelization / 线程级别并行化
通常我们把 CONV 任务分割成几块,然后在 CPU 不同核上进行并行运行;
内核库比如 Intel 的 MKL-DNN 经常使用现成的多线程方案,比如 OpenMP;
然而我们发现利用这种现成并行方案的可拓展性并不理想;
因此我们定制化了一个 thread pool / 线程池 来高效的处理这种尴尬的并行问题;
在一个有 N 个物理核心的系统中,我们将操作的的最外层循环分成 N 份,然后分给 N 个线程;
然后我们在并发期间,通过 C++ 11 atomics 来协调线程,然后在调度程序和每个工作线程之间,通过 an single-producer-single-consumer / 单生产者单消费者模式 的 lock-free queue / 无锁队列 ;
活跃的线程在不同的物理核上运行,来保证最小化的硬件冲突,正如之前所提到,我们没有打开超线程;
对于可以被多个线程访问的全局数据结构(比如 lock-free queues / 无锁队列),我们根据需要来插入缓存进行填充,来避免线程之间的错误共享;
总而言之,这个定制化的线程池,通过这种机制,来减少资源争夺冲突,并减少线程启动开销,这使得这种方式的性能要好于 OpenMP;
3.2 Layout transformation elimination / 布局转换(开销)消除
在这一节,我们把 CNN 模型中的 单个操作优化 拓展到 整个计算图的优化;
主要的思路来源于 3.1 节介绍的从图级别减少数据布局转化开销;
之前的操作关注于单步的操作优化,而没有考虑高度优化的操作之间,数据布局转换要带来的开销;
在 CNN 模型计算中,大多数的工作量是 CONVs,而输入一般都是 NCHW[x]c ,所以我们应该确保每个 CONV 都在布局里面执行;
然而,有些 CONVs 之间的操作可能只和默认布局兼容,导致每一个 CONV 在计算之前需要将输入数据布局(NCHW 或者 NHWC)转换成 NCHW[x]c,并在最后将其转换回去;
这种转换会带来明显的性能开销;
幸运的是,从图级别去看,我们可以把 CONV 之外的布局视为一个独立的节点,仅在必要的时候去插入;
也就是说,我们消除了 CONV 计算时候发生的转换,并尽可能地通过图保持转换后的布局流程;
为了判断一个数据转换是否有必要,我们首先根据操作和数据的接触方式来分为三类:
1. Layout-oblivious operations / 布局无关操作:
这些操作不需要考虑 layout,可以在任意布局中处理数据,比如 ReLU,Softmax 等等;
2. Layout-tolerant operations / 布局半依赖操作:
这些操作需要知道处理的 data layout,比如 CONV,对于我们来说,要处理 NCHW,NHWC 和NCHW[x]c 布局; 还有其他一些操作比如 Batch_Norm, Pooling 等等;
3. Layout-dependent operations / 布局依赖操作:
这些操作只在特定 layout 里面进行,它们不接受数据转换,因此在进行这种操作之前,要事先转换好特定格式;比如 Flatten, Reshape 等等;
典型 CNN 模型中 CONVs 之间操作是布局无关的(比如 ReLU,SoftMax, Concat 和 ElemwiseAdd)或者 layout-tolerant (比如 Batch_Norm 和 Pooling)类型的,使得数据格式可以保持 NCHW[x]c 来跨越卷积层;
从 NCHW 到 NCHW[x]c 的格式转换发生在第一次 CONV 之前;CONVs 之间的的数据布局可以维持相同格式而不进行转换(比如 NCHW[x]c 的 x 值相同);
只有依赖布局的操作,比如 Flatten ,数据布局要从 NCHW[x]c 转换回 NCHW;
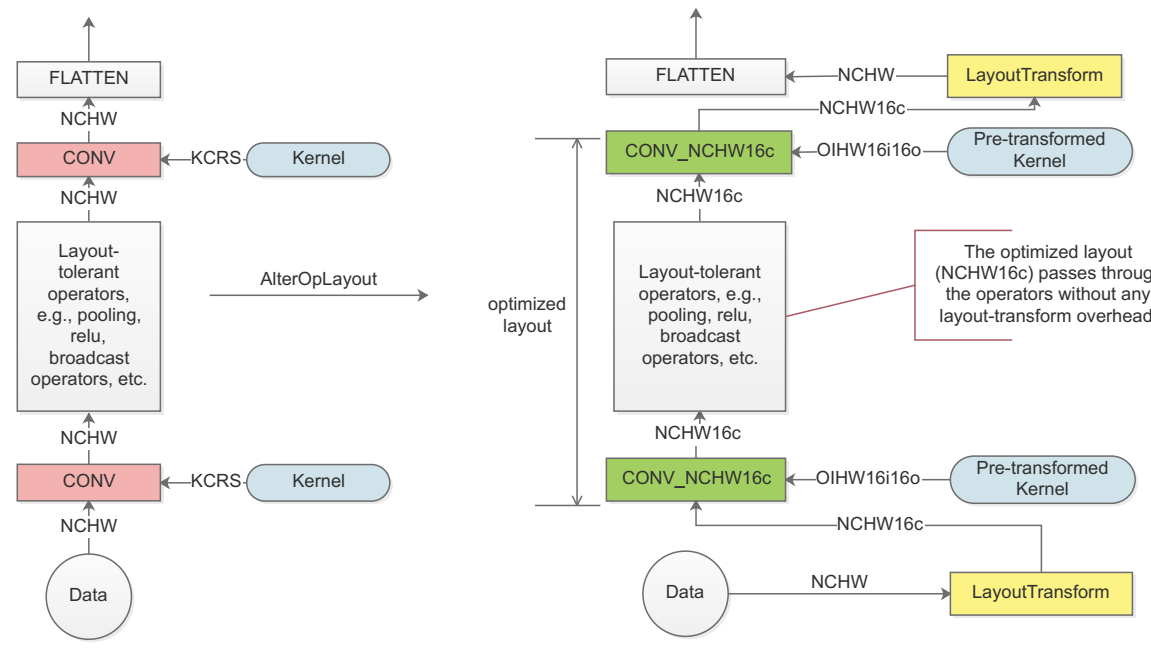
图 2:一个简单 CNN 模型的布局优化;左边的流程是默认的数据布局,每一个粉色的 CONV 节点需要额外的开销来进行数据转换,以获得好的性能表现,然后再转换成默认布局;
右边的流程在图级别进行优化,最小化数据布局转化开销;绿色的 CONV 节点在计算前后不需要进行任何数据转换;
实际操作中,我们首先遍历我们的计算图,来推断所有节点的数据格式,正如图 2 左边的流程图所示,然后我们将 CONVs 的布局从默认转换为 NCHW[x]c 来获得更好性能表现;
注意到为了避免进一步转换,我们把 x 定义为 a constant number / 常量;
然而为了优化性能, x 的值在不同的 CONVs 层可能不一样,所以需要进行布局转换;我们将会在 3.3 节进一步说明;
最后,将 LayoutTransform 节点相应地插入到计算图中;
因此我们仍然具有网络的 NCHW 输入输出,但是 CONV 层之间内部布局,是以优化过的 NCHW[x]c 格式存在的,正如图 2 右边所示;
值得注意的是,模型参数的布局(比如卷积核权重 ,Batch_Norm 的均值和方差)是不变的,所以可以在编译期间进行预先转换;
我们通过向 TVM stack 引入多个图级别的优化过程来实现这个方法;
通过尽可能保持 CONV 层之间,转换后的格式布局不变,和编译时候对卷积核权重的预转换,我们进一步提高了 CNN 模型推理的端到端性能;
3.3 Optimization Scheme search / 优化方案搜索
我们提出了上述的优化方案,尤其根据硬件的特点,比如 cache-size, vectorization unit width, memory access pattern 等等,对数据进行布局;
然而手动尝试所有可能的优化方式既繁琐又不切实际;
所以 3.2 节 假设通道分离出来的参数比如 NCHW[x]c 中的 x,在整个网络中不变,虽然在不同 CONVs 选取不同的 x 值会带来更好的性能;
除此之外,分离出来 output width 的参数比如 reg_n,也需要针对不同的矢量化指令集进行调整;
因此自动的最优方案寻找来进一步提升性能;
我们应该让领域专家来帮忙构建一个搜索空间(在最短的时间内,针对某种平台设备找到最佳方案);
搜索分为两步,第一步局部搜索,找到各个计算密集型操作的优化方案,然后是全局搜索,选取组合各个方案以获得最佳的端到端性能;
在 3.1 节中提出的优化模板,证明了这种方式是可行的;
3.3.1 Local Search / 局部搜索
第一步为每个 computationally-intensive operations / 计算密集型操作(比如 CNN 模型中的 CONVs)找出优化方式;
我们用一个 tuple / 组 :(ic_bn, oc_bn, reg_n, unroll_ker)来代表一个卷积过程,这些参数来代表在不同架构 CPU上进行不同卷积任务;
前两个参数 ic_bn 和 oc_bn 代表输入和输出通道分离出来的参数(比如 NCHW[x]c 中的 x),针对于某种 CPU,和 cache size / 缓存大小 有关;
第三个参数 reg_n 代表 Innder Loop 中要使用的 SIMD 寄存器数目,和 CPU 架构和代数有关;我们也观察到,在一个线程中使用所有的 SIMD 寄存器往往并不能带来最佳性能表现;
最后一个参数 unroll_ker 是一个布尔值 ,用来来决定是否展开对卷积核计算的循环(算法 1 中 12 行),因为有时候展开循环会通过减少 branch penaltiles / 分支转移损失 来提高性能;
局部搜索使用 3.1.1 节提到的 template 来找出这些值的最佳组合方式,来最小化 CONV 执行时间;
按照以下步骤进行局部搜索:
- 定义 ic_bn 和 oc_bn 的候选列表;为了尝试出所有的可能,我们列出通道数的所有参数;比如,如果通道数是 64,我们选取 [32, 16, 8, 4, 2, 1] 作为备选;
- 定义 reg_n 的候选列表,实际操作中,我们从 [32, 16, 8, 4, 2] 选取 reg_n 的值;
- 定义 unroll_ker 的候选列表:[True, False];
- 遍历定义的空间来获得所有组合的执行时间,每个组合运行多次以获取平均时间;最终会生成一个按照执行时间升序排列的列表;
值得注意的是,我们通过这种配置的方法来设计这样一个 tuple,意味着我们可以根据需要去修改这个 tuple(比如加减参数,修改值);
根据经验,在一台机器上进行一次 CNN 模型的局部搜索,需要花费几个小时,这是可以接收的;
比如在一台 18 核 Intel Skylake 处理器机器上,需要花费 6 个小时来进行 ResNet-50 中 20 个不同 CONV 任务搜索;
除此之外,我们维护了一个数据库,里面存储着每种 CPU 上每种卷积工作量(由特征图核卷积核尺寸定义)的结果,以防止在不同模型中重复搜索;
局部搜索针对于每个单独的操作的优化效果都很好,而且确实是比手动搜索更高效的方法;
然而对每个操作进行局部最优搜索,可能导致并不是全局最优;
比如两个连续 CONV 操作 conv_0 和 conv_1,如果 conv_0 的 输出分割因子(oc_bn)和 conv_1 的 输入分割因子(ic_bn)不同,我们需要进行额外的布局转换工作;
这个额外的转换带来的开销要大于局部搜索所带来的性能提高,尤其网络很大的时候;
换句话说,如果我们在整个网络中选取一个常量作为分割因子(正如 3.2 节所述),我们会在有些 CONVs 没有进行优化;
因此,我们接下来会用全局搜索来做权衡;
3.3.2 Global search / 全局搜索
在这一节,我们会将优化搜索拓展到整个计算图中;
想法是允许每个 CONV 自由的选择分割因子 x (即 ic_bn 和 oc_bn),并考虑相应的数据布局转换所带来的时间开销;
根据 3.2 节所述,CONVs 之间的操作要么是 layout-oblivious 要么是 layout-tolerant,所以它们可以使用 CONV 操作所决定的 x 值;
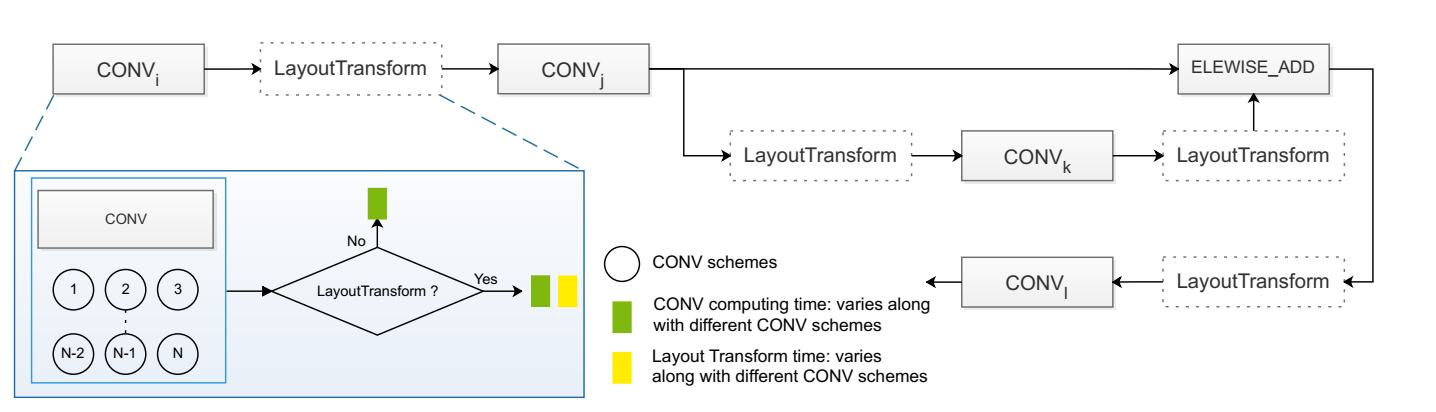
图 3:CNN 模型推理全局搜索:LayoutTransform 可选,如果,加入 LayoutTransform,带来的数据转换额外开销如黄色块所示;
我们在以图 3 中模型举例来说明我们的想法;从图中可以看到每个 CONV 有一些候选的方案(由不同的 ic_bn 和 oc_bn 组合指定);
通过局部搜索可以得到每个组合的最短执行时间;
由于 ic_bn 和 oc_bn 的选择经常小于 10,所以组合总数一般小于 100;
选择不同的方案会带来不同的数据转化开销(CONVs 之间虚线框表示)或者不需要转换(如果某个 CONV 的 oc_bn 等于后续 CONV 的 ic_bn);
为了简化起见,我们在图中省略了一些不影响全局搜索的操作(比如两个 CONVs 之间的 ReLu,Batch_Norm);
但是,例如 Elementwis_Add 这种操作不能被省略,因为它需要它的两个输入操作数(CONVj 和 CONVk 的 输出)的格式是一样的;
也就是说,一个 有着 n 个 CONVs (每个 CONV 由 ki 个可选方案,总数是 k1 x k2 x .. x kn)的 CNN 模型,随着层数 n 增大,很容易变得很难处理;
幸运的是实际上我们可以使用一个 dynamic programming(DP)algorithm / 动态规划算法 来有效的解决这个问题;
为一个 CONV 选择方案的时候,只要记住目前的全局最优方案,考虑它自己和它的直接前向连接的 data layout / 数据布局 ,而不需要任何其他前向的 CONV;
算法 2 中介绍了这种方法;
实际上许多 CNN 模型结构很简单,可以简化成一个列表(列表中每个 CONV 只有一个前向处理);
这种情况下,一个 CONV 完成之后,可以安全的删除掉前面处理所产生的中间状态;
对于更复杂点的结构,比如使用 Elementwise_Add 来将两个 CONV 的输出输入到下一个 CONV 就会很棘手,因为一个 CONV 的 schemes 可能需要保存下来,以后还要使用(比如图 3 中通过 Elementwise_Add 方式,CONVl 需要 CONVj 的 schemes)
算法 2 全局搜索算法
以拓扑结构将计算图中节点进行排序;
使用候选方案的执行时间
for CONVi in topological order do
for each canidate scheme CSIj of CONi do > j is the jth scheme of CONVi
t = execution_time(CSIj)
GSIj = MAX // 在方案 j 下初始化 CONVj 的全局优化方案
for each so-far globally optimal scheme GSXk of predecessor x do // k 是 CONVx 的 kth 方案
cur_opt = t + transform_time(k,j) + GSXk
if cur_opt < GSIj then
GSIj = cur_opt
end if
end for
end for
end for
return 最后节点的最短方案
然而,如果模型结构过于复杂,CONV 之间存在很多数据依赖关系,那么 DP 算法也会变得不好用;
比如,由于很多 concatenation blocks / 级联块 的出现,SSD 中目标检测模型的状态数可以达到万亿数量级;
这种情况下,我们介绍相似的解决方法来加速搜索;
我们将全局搜索问题,简化成编译器领域中,稍加修改的寄存器分配问题;
将寄存器分配问题模型化,每一个 node 有一个候选列表(包含所有可能寄存器选项),每个 edge 和一个 cost matrix / 开销矩阵 关联,这个矩阵描述了两个 node 之间寄存器的可用情况;
和我们全局搜索中类似,每个 CONV 有一系列的备选方案,每个 edge 和 两个 CONVs 的方案列表,所生成的 layout transformation cost matrix / 布局转换开销矩阵 相关联;
对于别的 non-CONV 的节点,比如 Elementwise_Add,会要求所有的输入必须是相同格式,我们需要把一个输入格式进行修改,然后其他的输入格式都转换过去;
因此,我们定义 non-CONV 的节点的候选列表定义为和第一个 CONV 的输入相同,并且将这两个节点之间的 cost martix 定义为相同,因为对角元素都为0,所以其他元素都无穷大;
由于我们本质上没有对网络进行更改,所以模型输出结果不变;
为了验证,我们将 NeoCPU 结果和其他结果(图像分类模型预测精度和目标检测模型预测准确度)进行比较;
4.1 Overall Performance / 整体性能表现
表 2 中,我们在不同的 CPU 平台上,测试不同优化方式对 15 种主流的 CNN 模型的性能提升影响;
1000 次采样来获取平均执行时间,每次进行一张图像推理(batch_size=1);
总体来说,在不同的 CPU 平台使用不同的模型,NeoCPU 方法的性能表现要比其他方法好(忽略 OpenVINO 中的一些异常结果,NeoCPU 最高可以带来 11x 性能提升);
和每个模型的最佳基准结果比较,NeoCPU的表现如下:
- 在 Intel Skylake CPU 上得到 0.94-1.15x 性能提升;
- 在 AMD EYPC CPU 上得到 0.92-1.72 性能提升;
- 在 ARM Cortex A72 CPU 上得到 2.05-3.45 性能提升;
对于 Framework-specific / 依赖框架 的方案,MXNet 和 TensorFlow 并不是在 CPU 上进行 CNN 模型推理的最佳选择;
因为缺少在 graph-level / 图级别 进行优化(比如灵活数据布局管理)的灵活性;
MXNet 支持 Intel MKL-DNN,所以在 x86 CPU 上面性能不错;
但是 MXNet 在 ARM 上比 TensorFlow 性能差,因为 Scalability Issue / 扩展性问题(图 4c 所示);
TensorFlow 在 SSD 模型表现明显不行,因为 SSD 进行推理的时候要进行 Dynamic Decisions / 动态决策;
相比之下,OpenVINO 中框架无关的方案希望通过移除框架限制来加速性能,然而 OpenVINO 在各个模型中的性能测试结果都不稳定;
尽管一些场景下性能不错,但是有时候在一些特定的模型很慢(比 NeoCPU 在 AMD CPU 上优化 ResNet-152 慢了 45 倍);
在进行结果分析的时候,我们没有考虑这些异常情况;
值得注意的是 OpenVINO 测量 SSD 的执行时间时候,没有把很多操作(比如 multibox detection)时间算进去;
由于 OpenVINO 不是开源的,所以无法进行内部修改来获取 SSD 模型的真实执行时间;
因为 OpenVINO 依赖于 MKL-DNN(针对于 x86 架构),所以不适用于 ARM CPU;
NeoCPU 方案的性能表现突出,因为基于我们第三章所提出的高性能优化技术;
除此之外,所有的基准优化方式很大程度依赖于第三方库(MKL-DNN,OpenBlas,Eigen);
NeoCPU 不依赖于这些库,所以有很大的性能提升空间;
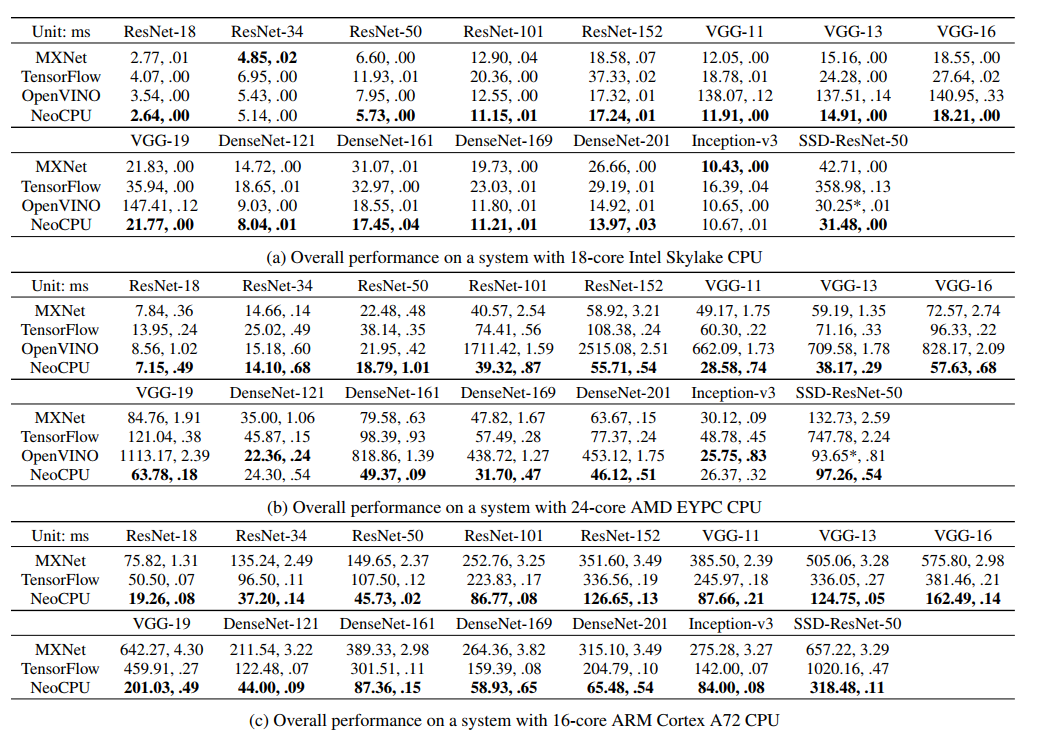
表 2 :NeoCPU 和其他基准方案的对比;每个结果是进行了 1000 次测试的平均执行时间;每种模型的最优方案被 加粗显示;(OpenVINO 的 SSD 执行时间是不精确的)
4.2 Optimization Implications / 优化意义
这一节我们会将详细介绍第三节描述的优化方案;
为了方便起见,我们在每一个 network family 分别只选取一个网络作比较;
相同 network family 的其他网络优化思路类似;
在 4.2.1 - 4.2.3 节,我们只讨论在 Intel CPU 的性能表现(优化效果也适用于 AMD 和 ARM CPU 上);
4.2.1 节介绍 operation-level 优化,4.2.2 和 4.2.3 节介绍了 operation-level and graph-level joint optimization / 联合优化;
4.2.1 Layout optimization of CONV /
首先,我们比较了表 3 第二行中的 CONV 操作,在有无 organizing the data in a memory access / 内存访问 和 vectorized instruction utilization 向量化指令利用布局组织数据;
这是 4.1 节中大量使用的 Operation-level 优化,
我们将其复制到一个模板,然后在不更改汇编代码或者内部代码的前提下,使用 TVM 调度机制来在不同 CPU 平台上进行 CNN 模型优化;
从表 3 第二行我们可以看到,与默认数据布局(NCHW)比较有着显著提升;
两种实现方式都配置正确的矢量化,和线程级别的并行化,
也有 TVM stack 中介绍的基本图级别优化方法,比如 operation fusion / 操作融合, pre-computing / 预计算,inference simplification / 推理简化 等等;
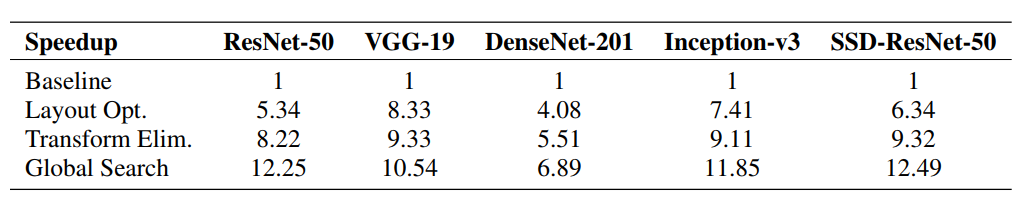
表3:与 NCHW 基准相比我们的优化方式带来的性能提升;
4.2.2 Layout transformation elimination / 布局转换评估
其次,我们评估了 3.2 节介绍的,通过消除数据布局转换开销带来的性能提升;
结果如表 3 第三行所示,可以看到减少了布局转换的开销,性能提升了 1.1-1.5x;
NeoCPU 使用系统的方法来消除不必要的数据布局转换,通过推断全局的数据布局,并仅在需要的时候插入格式转换节点;
4.2.3 Optimization scheme search / 优化机制搜索
接下来,我们比较我们搜索算法产生的优化机制,和手动筛选结果的性能表现;
根据表 3 中的第三和第四行,我们可以看到 3.3 节中介绍的算法能够找到数据布局的接近最优组合;
比我们手动找出的结果性能要好 1.1-1.5 倍;
全局搜索加速了 ResNet-50(和它的 variants)获得了加速,因为网络结构更加复杂所以有更多优化空间;
作为对比,VGG-19(和它的 variants)加速效果没那么好,因为结果比较简单;
SSD 利用相似算法,获得了显著的加速效果;
结果验证了自动搜索,可以让我们不需要手动进行调参,还可以获得更好的性能;
据我们所知,NeoCPU 是唯一种目前可以达到这种程度优化的方案;
4.2.4 Multi-thread parallelization / 多线程并行化
最后,我们用 3.1.2 节提到的线程池(通常在 GCC 编译器中通过 OpenMP API 实现)实现的多线程,来进行拓展性的测试;
我们对使用了 Intel MKL-DNN,OpenBlas 和 Eigen(所有通过 OpenMP 实现多线程)的 MXNet,TensorFlow 和 OpenVINO 的结果进行对比;
我们通过环境变量来配置 OpenMP,来确保线程的分配(每个线程会在一个互不相干的核心上运行),类似于线程池的操作;
按照一张接一张的顺序(batch size=1)处理,一秒内一个模型能够处理的数目在图 4 中给出;
为了方便展示,图 4 按照 CPU 平台划分成 3 张图(Intel / AMD / ARM);
图 4 表明我们的线程池的性能,要比 OpenMP 在 NeoCPU 或者其他方案更好;
OpenMP 启动关闭线程的开销要大于我们的线程池,而且拓展性也不好;
此外,我们观察到,有时候在添加线程时,性能表现会有波动甚至下降;
OpenMP 的性能也有可能根据实现方式不同而不同;
总结来说,我们的评估方法适用于我们的场景,但是针对于不同场景最好有自己定制化的线程池;

图 4:不同线程数下不同优化方案的处理速度;Standard errors / 标准误(< 0.4)太小在图中看不到
5 Related Works / 相关工作
深度学习在我们日常生活中应用越来越广泛,但是仍然还有很多的工作要做(在不同的硬件平台上,CPU / GPU / FPGA / 加速器 上去进行加速深度学习过程);
如今深度学习框架经常要在不同硬件平台上,利用这些优化的实现方式来运行深度学习训练和推理;
对于一些对于推理性能有特殊要求(比如要求 低延迟 / low- latency 或者 small-binary-size )的硬件平台,我们也需要对其进行优化工作;
NeoCPU 更加的灵活,高效的把 operation-level 和 graph-level 优化相结合;
尽管本文专注于如何在 CPU 平台上进行优化,但是这些思路也可以应用到其他硬件平台上;
NeoCPU 基于 TVM stack( 启发于 Halide 的一个端到端的框架),TVM stack 中介绍了如何将一个深度学习网络转为 Intermediate Representations (IRs) / 中间文件 ;
也有几种其他类似的深度学习编译器比如 TensorFLow XLA,Tensor Comprehensions,Glow 和 DLVM;
然而,这几种编译器都没有类似于我们这种,在 CPU 推理优化过程的研究结果(比如 Glow 仅仅在 CPU 进行单核优化);
我们相信我们提出的这种方案可以整合到这些框架中;
我们利用其他高性能库中,成熟的方法来优化计算密集型的 CONV 操作;
除了这些库,对于 convolutions / 卷积操作 和 matrix multiplications / 矩阵乘法 ,在 Intel CPU 上也有一些高度定制的优化;
这些工作大多数关注于单个 operation-level 的优化,根据卷积过程和 CPU 资源来进行微调,而不考虑整个网络;
这种优化可以在目标 CPU 上最大化卷积的性能,但是拓展到其他平台上做联合优化就很不方便;
和其他优化不同,我们有一个可以配置的模板来进行优化配置,这样的话对于不同架构 CPU 就可以进行很灵活的配置,在 operation-level 和 graph-level 进行联合优化也会变得很容易;
我们利用自动搜索来寻找最佳优化方式;
相似的 auto-tuning 思路在其他地方也被介绍过;
然而他们都关注于对于单个操作,进行性能调整,而我们是对于整个 CNN 模型进行全局优化考虑;
最近我们也在关注在 graph-level 进行 DNN 任务的优化,优化任务牺牲一些局部的优化性能来提高整体的优化性能;
这种非贪婪的想法和我们的思路很相似,也运用在我们的方案中;
我们受启发于 Register Allocation Problem 中的 PBQP,利用相似算法来对复杂结构模型(比如 SSD)进行全局搜索;
这篇文章利用已有的方案思路,稍加修改然后运用到新的领域;
6 Conlusion / 总结
这篇文章中,我们提出了一种端到端的解决方案,在 CPU 上用来编译和优化 CNN,来进行高效的模型推理;
实验表明,在不同种类的 CPU 上(Intel Skylake,AMD EPYC 和 ARM Cortex A72),针对 15 种主流的 CNN 模型中,和其他最先进的方案相比,我们能够达到 3.45X 性能提升;
未来我们会关注于:
- 拓展其他卷积计算算法,比如 Winograd 和 FFT;
- 支持处理量化(比如 INT8)模型推理;
- 在别的硬件平台(比如在 Nvidia 的 GPU 上和 TensorRT 比较)拓展我们 operation-level 和 graph-level 联合优化方案;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号