ROS探究(二)自定义msg并使用Clion编译
1 建立msg文件
tzy@ubuntu:~/ROS_Example/catkin_ws$ source devel/setup.bash tzy@ubuntu:~/ROS_Example/catkin_ws$ roscd beginner_tutorials/
tzy@ubuntu:~/ROS_Example/catkin_ws/src/beginner_tutorials$ vim msg/Area.msg
Area.msg内容为:
loat64 triangleArea
float64 squareAresa
2 修改package.xml和CMakeLists.txt
两个文件均处在~/ROS_Example/catkin_ws/src/beginner_tutorials下
package.xml中确保包含
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
CMakeLists.txt中确保包含
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation 需要使用msg生成包 ) add_message_files( FILES Area.msg 添加自定义消息 ) generate_messages( DEPENDENCIES std_msgs 自定义消息Area依赖std_msgs ) catkin_package( # INCLUDE_DIRS include # LIBRARIES beginner_tutorials CATKIN_DEPENDS roscpp rospy std_msgs message_runtime # DEPENDS system_lib ) add_executable(msg_talker src/msg_talker.cpp) 添加编译对象 target_link_libraries(msg_talker ${catkin_LIBRARIES}) add_dependencies(msg_talker ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) add_executable(msg_listener src/msg_listener.cpp) 添加编译对象 target_link_libraries(msg_listener ${catkin_LIBRARIES}) add_dependencies(msg_listener ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
3 添加源代码
msg_talker.cpp
#include "ros/ros.h" #include "beginner_tutorials/Area.h" int main(int argc, char **argv) { ros::init(argc, argv, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<beginner_tutorials::Area>("chatter", 5); ros::Rate loop_rate(1); int count = 0; while (ros::ok()) { beginner_tutorials::Area msg; std::stringstream ss; msg.squareAresa = count; msg.triangleArea = count*2; chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0; }
msg_listener.cpp
#include "ros/ros.h" #include "beginner_tutorials/Area.h" void chatterCallback(const beginner_tutorials::Area::ConstPtr& msg) { ROS_INFO("I heard: [%f] [%f]", msg->squareAresa, msg->triangleArea); } int main(int argc, char **argv) { ros::init(argc, argv, "listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter", 5, chatterCallback); ros::spin(); return 0; }
4 编译
tzy@ubuntu:~/ROS_Example/catkin_ws$ catkin_make Base path: /home/tzy/ROS_Example/catkin_ws Source space: /home/tzy/ROS_Example/catkin_ws/src Build space: /home/tzy/ROS_Example/catkin_ws/build Devel space: /home/tzy/ROS_Example/catkin_ws/devel Install space: /home/tzy/ROS_Example/catkin_ws/install #### #### Running command: "make cmake_check_build_system" in "/home/tzy/ROS_Example/catkin_ws/build" #### -- Using CATKIN_DEVEL_PREFIX: /home/tzy/ROS_Example/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /home/tzy/ROS_Example/catkin_ws/devel;/opt/ros/kinetic -- This workspace overlays: /home/tzy/ROS_Example/catkin_ws/devel;/opt/ros/kinetic -- Using PYTHON_EXECUTABLE: /usr/bin/python -- Using Debian Python package layout -- Using empy: /usr/bin/empy -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/tzy/ROS_Example/catkin_ws/build/test_results -- Found gmock sources under '/usr/src/gmock': gmock will be built -- Found gtest sources under '/usr/src/gmock': gtests will be built -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.7.18 -- BUILD_SHARED_LIBS is on -- BUILD_SHARED_LIBS is on -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 2 packages in topological order: -- ~~ - beginner_tutorials -- ~~ - pluginlib_tutorials_ -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'beginner_tutorials' -- ==> add_subdirectory(beginner_tutorials) -- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy -- beginner_tutorials: 1 messages, 0 services -- +++ processing catkin package: 'pluginlib_tutorials_' -- ==> add_subdirectory(pluginlib_tutorials_) -- Configuring done -- Generating done -- Build files have been written to: /home/tzy/ROS_Example/catkin_ws/build #### #### Running command: "make -j4 -l4" in "/home/tzy/ROS_Example/catkin_ws/build" #### [ 0%] Built target std_msgs_generate_messages_py [ 0%] Built target std_msgs_generate_messages_lisp [ 0%] Built target roscpp_generate_messages_py [ 0%] Built target roscpp_generate_messages_cpp [ 0%] Built target rosgraph_msgs_generate_messages_nodejs [ 0%] Built target rosgraph_msgs_generate_messages_eus [ 0%] Built target _beginner_tutorials_generate_messages_check_deps_Area [ 0%] Built target std_msgs_generate_messages_cpp [ 0%] Built target rosgraph_msgs_generate_messages_cpp [ 0%] Built target rosgraph_msgs_generate_messages_py [ 0%] Built target roscpp_generate_messages_eus [ 0%] Built target rosgraph_msgs_generate_messages_lisp [ 0%] Built target roscpp_generate_messages_nodejs [ 0%] Built target std_msgs_generate_messages_nodejs [ 0%] Built target roscpp_generate_messages_lisp [ 0%] Built target std_msgs_generate_messages_eus [ 5%] Built target beginner_tutorials_generate_messages_cpp [ 15%] Built target listener [ 26%] Built target talker [ 36%] Built target polygon_plugins [ 47%] Built target beginner_tutorials_generate_messages_py [ 52%] Built target beginner_tutorials_generate_messages_lisp [ 57%] Built target beginner_tutorials_generate_messages_nodejs [ 68%] Built target polygon_loader [ 78%] Built target beginner_tutorials_generate_messages_eus Scanning dependencies of target msg_listener Scanning dependencies of target msg_talker [ 78%] Built target beginner_tutorials_generate_messages [ 89%] Building CXX object beginner_tutorials/CMakeFiles/msg_listener.dir/src/msg_listener.cpp.o [ 89%] Building CXX object beginner_tutorials/CMakeFiles/msg_talker.dir/src/msg_talker.cpp.o [100%] Linking CXX executable /home/tzy/ROS_Example/catkin_ws/devel/lib/beginner_tutorials/msg_listener [100%] Linking CXX executable /home/tzy/ROS_Example/catkin_ws/devel/lib/beginner_tutorials/msg_talker [100%] Built target msg_talker [100%] Built target msg_listener
catkin_make编译成功后Area.h头文件生成在如下目录
tzy@ubuntu:~/ROS_Example/catkin_ws$ find ./ -type f | grep Area.h
./devel/include/beginner_tutorials/Area.h
5 Clion中运行项目
打开项目如下
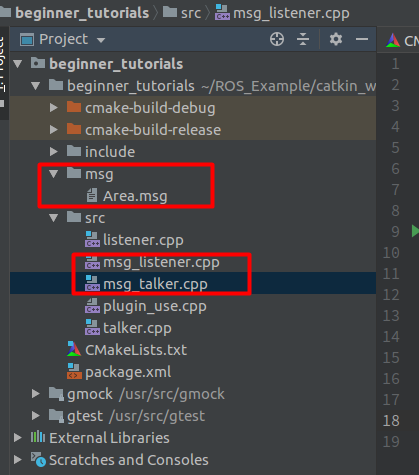
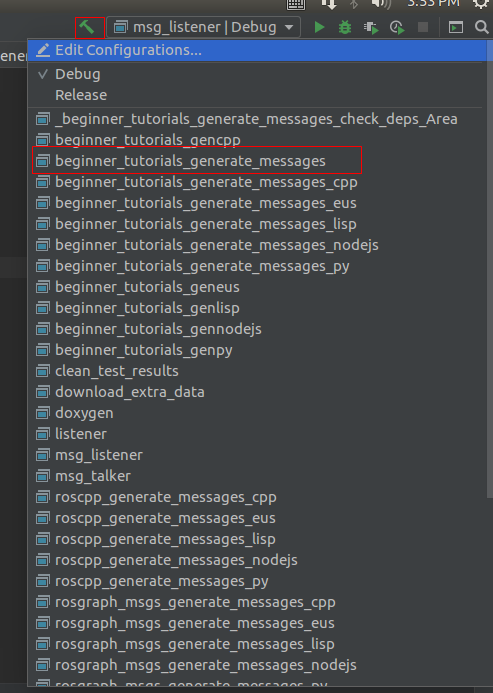
虽然命令行中catkin_make可以编译成功,但是Clion中会存在Area.h头文件无法识别的情况,所以先要在clion中执行generate_msg编译操作
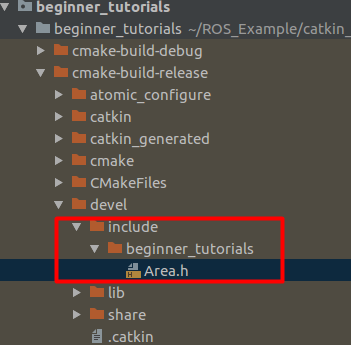
Area.h 生成在如下路径
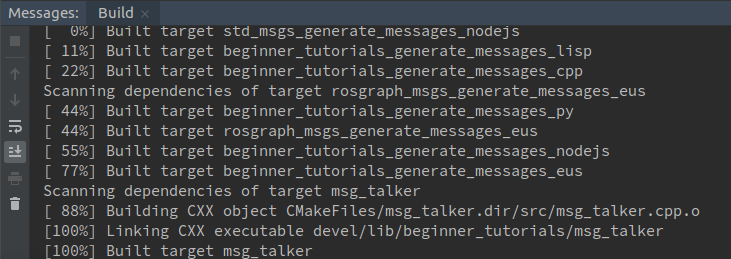
此时可直接编译msg_talker.cpp成功。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号