1 #include"reg52.h"//单片机头文件
2 #define uchar unsigned char//宏定义,用uchar表示unsigned char,叫无符号字符型数据类型,取值范围为:0到255。
3 #define uint unsigned int//宏定义,用uint表示unsigned int,叫无符号整数型数据类型,取值范围为:0到65535。
4 sbit qitingjian=P1^0;//位定义启停键
5 sbit zhengzhuan=P1^1;//位定义正转键
6 sbit fanzhuan=P1^2;//位定义反转键
7 sbit jiasujian=P1^3;//位定义加速键
8 sbit jiansujian=P1^4;//位定义减速键
9 sbit IN1=P1^5;//位定义数码管段码端口
10 sbit IN2=P1^6;//位定义数码管位码端口
11 sbit ENA=P1^7;//位定义L298M芯片使能端ENA
12 sbit duan=P3^0;//位定义L298M芯片控制端IN1
13 sbit wei=P3^1;//位定义L298M芯片控制端IN2
14 sbit qitingled=P3^4;//位定义启停指示灯
15 sbit zhengzhuanled=P3^5;//位定义正转指示灯
16 sbit fanzhuanled=P3^6;//位定义反转指示灯
17 sbit zhuansuled=P3^7;//位定义转速指示灯
18 sbit waibuzhongduanling=P3^2; //外部中断0端口
19 uint qian,bai,shi,ge,zhuansu;//数码管千位变量、百位变量、十位变量、个位变量以及转速变量
20 uint maichongcount,Time0num,Time1num,pwm,qitingnum,zhengzhuanflag,fanzhuanflag;//脉冲计数变量、定时器0定时计数变量、定时器1定时计数变量、脉冲宽度调制变量、启停键按下数次变量、正转标志位变量、反转标志位变量
21 uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x27,0x7f,0x6f,0x40,0x7c,0x39,0x5e,0x79,0x71,0x00};//共阴数码管段码,高电平点亮段码,低电平熄灭段码。
22 uchar code weima[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff};//共阴数码管位码,低电平点亮位码,高电平熄灭位码。
23 void delay(uint jishi);//毫秒延时函数
24 void TimerInit();//定时器初始化函数
25 void Time0();//定时器0定时函数
26 void Time1();//定时器1定时函数
27 void KeyScan();//按键扫描函数
28 void waibuzhongduanlingjishu();//外部中断0计数函数
29 void shumaguandisplay(uint qian,uint bai,uint shi,uint ge);//数码管显示函数
30 void shumaguannodisplay(uint qian,uint bai,uint shi,uint ge);//数码管无显示函数
31 void main()//主函数
32 {
33 TimerInit();//定时器初始化函数
34 IN1=0;//L298M芯片控制端IN1置低电平,电机不运转。
35 IN2=0;//L298M芯片控制端IN2置低电平,电机不运转。
36 while(1)//死循环
37 {
38 KeyScan();//按键扫描函数
39 if(qitingnum==1)//判断启停键是否第一次按下
40 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数
41 }
42 }
43 void delay(uint jishi)//延时函数
44 {
45 uint i,j;
46 for(i=jishi;i>0;i--)
47 for(j=110;j>0;j--);
48 }
49 void TimerInit()//定时器初始化函数
50 {
51 TMOD=0x11;//设定定时器为定时器0和定时器1,工作模式都为1。
52 TH0=(65536-1000)/256;//TH0装初值为65536-100=65436,即定时100微妙,相当于0.1毫秒。
53 TL0=(65536-1000)%256;//TL0装初值为65536-100=65436
54 TH1=(65536-50000)/256;//TH1装初值为65536-50000=15536,即定时50000微妙,相当于50毫秒。
55 TL1=(65536-50000)%256;//TL1装初值为65536-50000=15536
56 EA=1;//全局中断允许
57 ET0=1;//打开定时器0中断允许
58 TR0=1;//开定时器0
59 EX0=1;//开外部中断0允许
60 IT0=1;//设置外部中断0下降触发中断
61 ET1=1;//打开定时器1中断允许
62 TR1=1;//开定时器1
63 }
64 void Time0() interrupt 1//定时器0定时函数,每0.1毫秒产生pwm波一次。
65 {
66 TH0=(65536-1000)/256;//TH0重装初值为65536-100=65436,即定时100微妙,相当于0.1毫秒。
67 TL0=(65536-1000)%256;//TH0重装初值为65536-100=65436
68 Time0num++;//定时器0定时计数变量先赋值再自加
69 if(Time0num==20)//判断定时器0定时计数变量是否大于等于20,PWM波完整周期为20ms,定时器0定时计数变量Time0num数值越大,电机运转越快。
70 {
71 Time0num=0;//定时器0定时计数变量等于0
72 }
73 if(Time0num<pwm)//判断定时器0定时计数变量还否小于脉冲宽度调制变量
74 {
75 ENA=1;//L298M芯片使能端ENA置高电平,电机运转。
76 zhuansuled=0;//开转速指示灯
77 }
78 else
79 {
80 ENA=0;//L298M芯片使能端ENA置低电平,电机不运转。
81 zhuansuled=1;//关转速指示灯
82 }
83 }
84 void Time1() interrupt 3//定时器1定时函数,定时50ms,采集电机转速。
85 {
86 TH1=(65536-50000)/256;//TH1装初值为65536-50000=15536,即定时50000微妙,相当于50毫秒。
87 TL1=(65536-50000)%256;//TH1装初值为65536-50000=15536
88 Time1num++;//定时器1定时计数变量先赋值再自加
89 if(Time1num==20)//判断定时器1定时计数变量是否等于20,即每1秒测速一次。
90 {
91 Time1num=0;//定时器1定时计数变量等于0
92 EX0=0;//关外部中断0
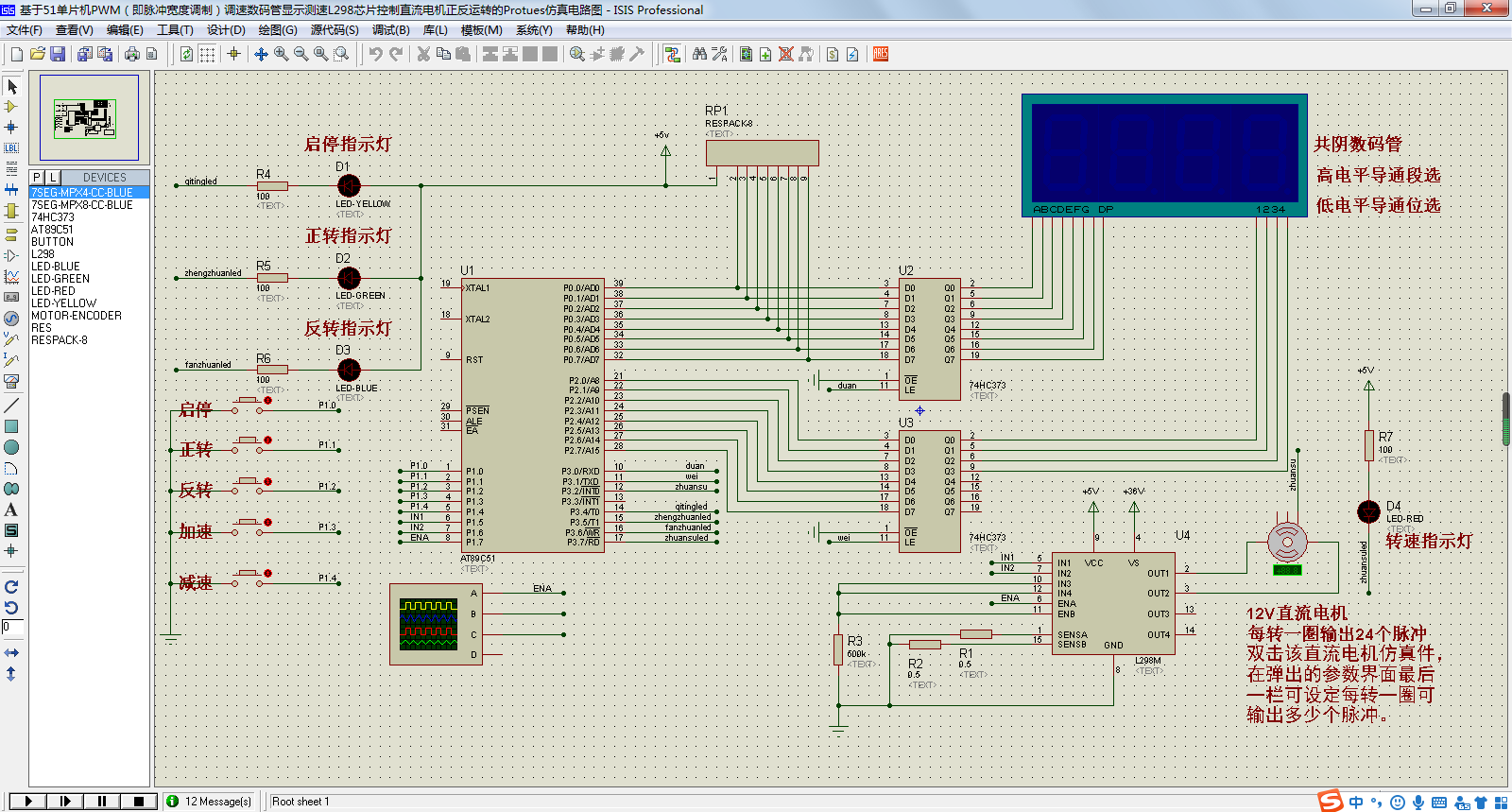
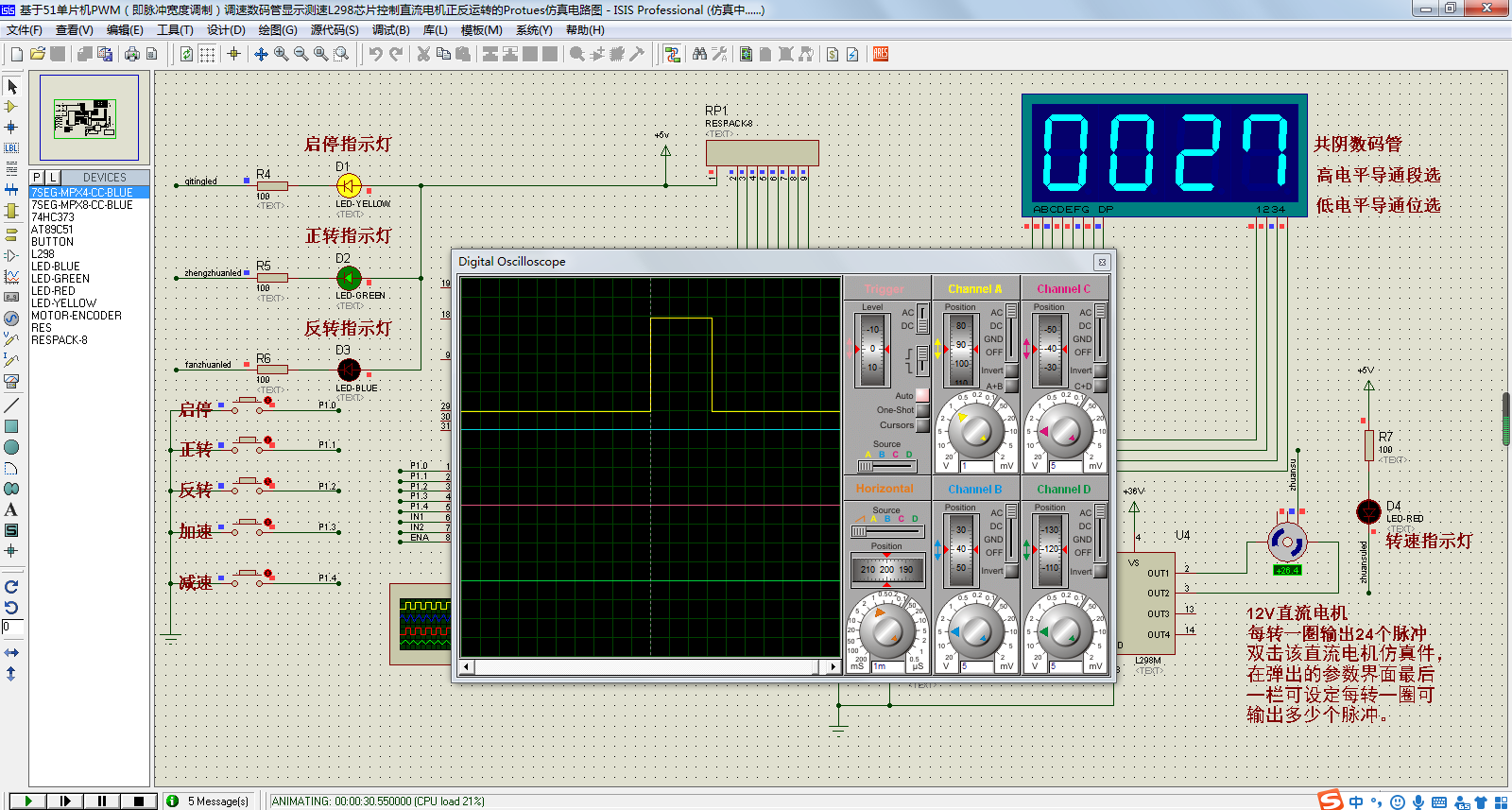
93 zhuansu=55*maichongcount/24;//电机转速=每分钟X脉冲计数变量/每转一圈需要的脉冲个数,即55*maichongcount/24,其中的55表示55秒,为什么不是一分钟60秒?由于Protues仿真电路图中的MOTOR-ENCODER仿真件存在误差,为了让MOTOR-ENCODER仿真件显示的转速达到数码管显示转速的效果,进行了一定秒数的修改,不过实际运用要以一分钟60秒为准,maichongcount为单片机从外部中断0端口处获取MOTOR-ENCODER仿真件旋转生产的脉冲计数变量,24为MOTOR-ENCODER仿真件每旋转一圈产生的脉冲个数。
94 qian=zhuansu/1000;//数码管千位显示
95 bai=zhuansu%1000/100;//数码管百位显示
96 shi=zhuansu%100/10;//数码管十位显示
97 ge=zhuansu%10;//数码管个位显示
98 maichongcount=0;//脉冲计数变量归零
99 EX0=1;//开外部中断0
100 }
101 }
102 void waibuzhongduanlingjishu() interrupt 0 using 1//外部中断0计数函数,外部脉冲计数。
103 {
104 maichongcount++ ;//脉冲计数变量先赋值再自加
105 }
106 void KeyScan()//按键扫描函数
107 {
108 if(qitingjian==0)//判断启停键是否按下
109 {
110 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
111 if(qitingjian==0)//再次判断启停键是否按下
112 {
113 while(!qitingjian)//启停键释放
114 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数
115 qitingnum++;//启停键按下数次变量先赋值再加加
116 qitingled=0;//开启停指示灯
117 if(qitingnum==2)//判断启停键按下数次变量是否为2
118 {
119 qitingnum=0;//启停键按下数次变量归零
120 qitingled=1;//关启停指示灯
121 zhengzhuanled=1;//关正转指示灯
122 fanzhuanled=1;//关反转指示灯
123 zhuansuled=1;//关转速指示灯
124 zhengzhuanflag=0;//正转标志位变量为0
125 fanzhuanflag=0;//反转标志位变量为0
126 IN1=0;//L298M芯片控制端IN1置低电平,电机不运转。
127 IN2=0;//L298M芯片控制端IN2置低电平,电机不运转。
128 shumaguannodisplay(qian,bai,shi,ge);//数码管无显示函数
129 }
130 }
131 }
132 if(qitingnum==1)//判断启停键是否第一次按下
133 {
134 if(zhengzhuan==0)//判断是否按下正转键
135 {
136 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
137 if(zhengzhuan==0)//再次判断是否按下正转
138 {
139 while(!zhengzhuan)//正转键释放
140 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
141 zhengzhuanled=0;//开正转指示灯
142 fanzhuanled=1;//关反转指示灯
143 zhengzhuanflag=1;//正转标志位变量为1
144 fanzhuanflag=0;//反转标志位变量为0
145 IN1=1;//L298N芯片控制端IN1置高电平
146 IN2=0;//L298N芯片控制端IN2置低电平
147 }
148 }
149 if(fanzhuan==0)//判断是否按下反转键
150 {
151 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
152 if(fanzhuan==0)//再次判断是否按下反转键
153 {
154 while(!fanzhuan)//反转键释放
155 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
156 zhengzhuanled=1;//关正转指示灯
157 fanzhuanled=0;//开反转指示灯
158 zhengzhuanflag=0;//正转标志位变量为0
159 fanzhuanflag=1;//反转标志位变量为1
160 IN1=0;//L298N芯片控制端IN1置低电平
161 IN2=1;//L298N芯片控制端IN2置高电平
162 }
163 }
164 }
165 if(zhengzhuanflag==1||fanzhuanflag==1)//判断电机是否为正转或反转
166 {
167 if(jiasujian==0)//判断是否按下加速键
168 {
169 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
170 if(jiasujian==0)//再次判断是否按下加速键
171 {
172 while(!jiasujian)//加速键释放
173 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
174 if(pwm < 20)//判断脉冲宽度调制变量是否小于20
175 pwm++;//脉冲宽度调制变量先赋值再加加
176 if(pwm >= 20)//判断脉冲宽度调制变量是否大于等于20
177 pwm = 19;//脉冲宽度调制变量等于20
178 }
179 }
180 if(jiansujian==0) //判断是否按下减速键
181 {
182 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
183 if(jiansujian==0)//再次判断是否按下减键
184 {
185 while(!jiansujian)//减速键释放
186 shumaguandisplay(qian,bai,shi,ge);//数码管显示函数做延时
187 if(pwm > 0)//判断脉冲宽度调制变量是否大于0
188 pwm--;//脉冲宽度调制变量先赋值再减减
189 if(pwm <= 0)//判断脉冲宽度调制变量是否小于等于0
190 pwm = 0;//脉冲宽度调制变量等于0
191 }
192 }
193 }
194 }
195 void shumaguandisplay(uint qian,uint bai,uint shi,uint ge)//数码管显示函数
196 {
197 duan=1;//开数码管段码端口
198 P0=table[qian];//数码千位显示
199 duan=0;//关数码管段码端口
200 P0=0x00;//关数码管段码显示
201 wei=1;//开数码管位码端口
202 P2=weima[0];//第1位数码管显示
203 wei=0;//关数码管位码端口
204 delay(1);//延时
205
206 duan=1;//开数码管段码端口
207 P0=table[bai];//数码百位显示
208 duan=0;//关数码管段码端口
209 P0=0x00;//关数码管段码显示
210 wei=1;//开数码管位码端口
211 P2=weima[1];//第2位数码管显示
212 wei=0;//关数码管位码端口
213 delay(1);//延时
214
215 duan=1;//开数码管段码端口
216 P0=table[shi];//数码管十位显示
217 duan=0;//关数码管段码端口
218 P0=0x00;//关数码管段码显示
219 wei=1;//开数码管位码端口
220 P2=weima[2];//第3位数码管显示
221 wei=0;//关数码管位码端口
222 delay(1);//延时
223
224 duan=1;//开数码管段码端口
225 P0=table[ge];//数码管个位显示
226 duan=0;//关数码管段码端口
227 P0=0x00;//关数码管段码显示
228 wei=1;//开数码管位码端口
229 P2=weima[3];//第4位数码管显示
230 wei=0;//关数码管位码端口
231 delay(1);//延时
232 }
233 void shumaguannodisplay(uint qian,uint bai,uint shi,uint ge)//数码管显示函数
234 {
235 duan=1;//开数码管段码端口
236 P0=table[qian];//数码千位显示
237 duan=1;//关数码管段码端口
238 P0=0x00;//关数码管段码显示
239 wei=1;//开数码管位码端口
240 P2=weima[0];//第1位数码管显示
241 wei=1;//关数码管位码端口
242 delay(1);//延时
243
244 duan=1;//开数码管段码端口
245 P0=table[bai];//数码百位显示
246 duan=1;//关数码管段码端口
247 P0=0x00;//关数码管段码显示
248 wei=1;//开数码管位码端口
249 P2=weima[1];//第2位数码管显示
250 wei=1;//关数码管位码端口
251 delay(1);//延时
252
253 duan=1;//开数码管段码端口
254 P0=table[shi];//数码管十位显示
255 duan=1;//关数码管段码端口
256 P0=0x00;//关数码管段码显示
257 wei=1;//开数码管位码端口
258 P2=weima[2];//第3位数码管显示
259 wei=1;//关数码管位码端口
260 delay(1);//延时
261
262 duan=1;//开数码管段码端口
263 P0=table[ge];//数码管个位显示
264 duan=1;//关数码管段码端口
265 P0=0x00;//关数码管段码显示
266 wei=1;//开数码管位码端口
267 P2=weima[3];//第4位数码管显示
268 wei=1;//关数码管位码端口
269 delay(1);//延时
270 }



 浙公网安备 33010602011771号
浙公网安备 33010602011771号