

NX2306 运动仿真-基本认知【机电设计概念】
【写在每个笔记前面:个人学习记录,如有错误,烦请指正,不胜感激。】
目前来说,尚未涉及到PLC的使用,初步试几个基本运动仿真的例子,整体感觉倒也不怎么难,按命令操作即可;
如果是自己实现全新的操作的话,对于我自己来说,有两个要点需要掌握:1、知道基本应用的功能;2、知道自己要实现的运动目的。
1、基本认知---对基础功能键的了解。
-
导航栏认知
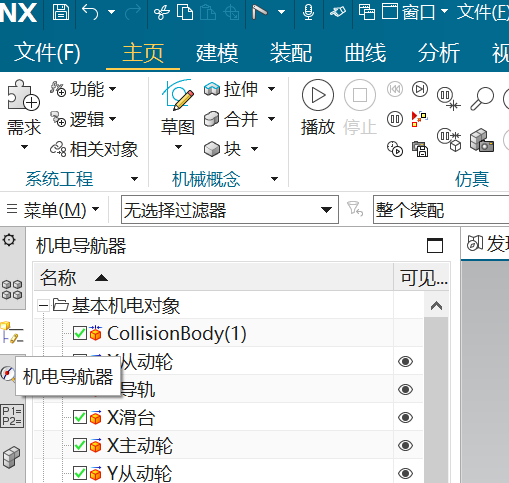
- 机电导航器:显示part中存在的MCD 对象........
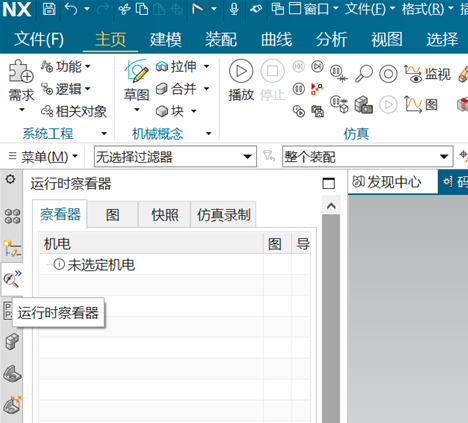
- 运行时察看器:监测对象参数值的变化
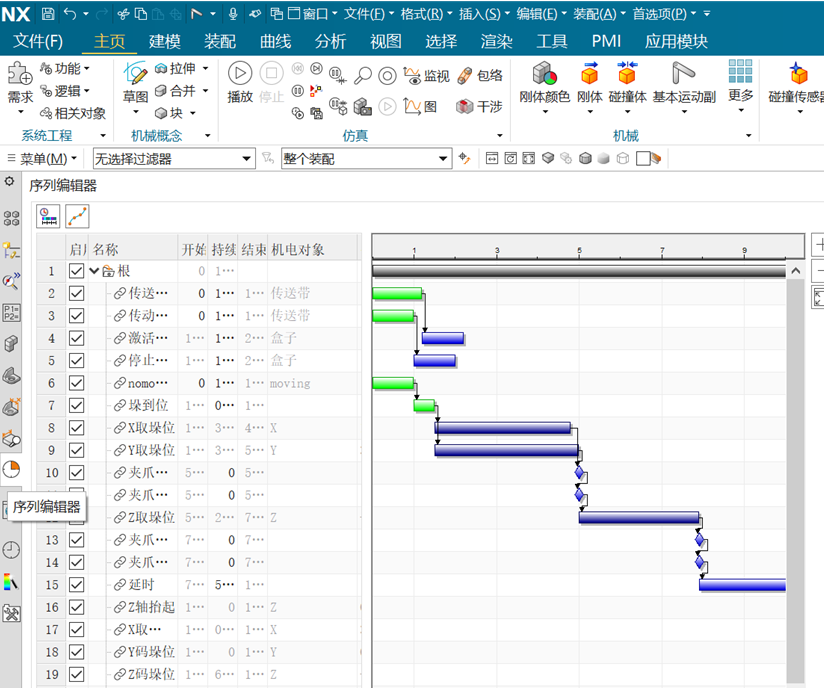
- 序列编辑器:用于管理“仿真序列”在何时or何种条件下开始执行
-
用户默认设置:
-
建模版:【文件】→【使用工具】→【用户默认设置】,每次打开都有效的
![]()
-
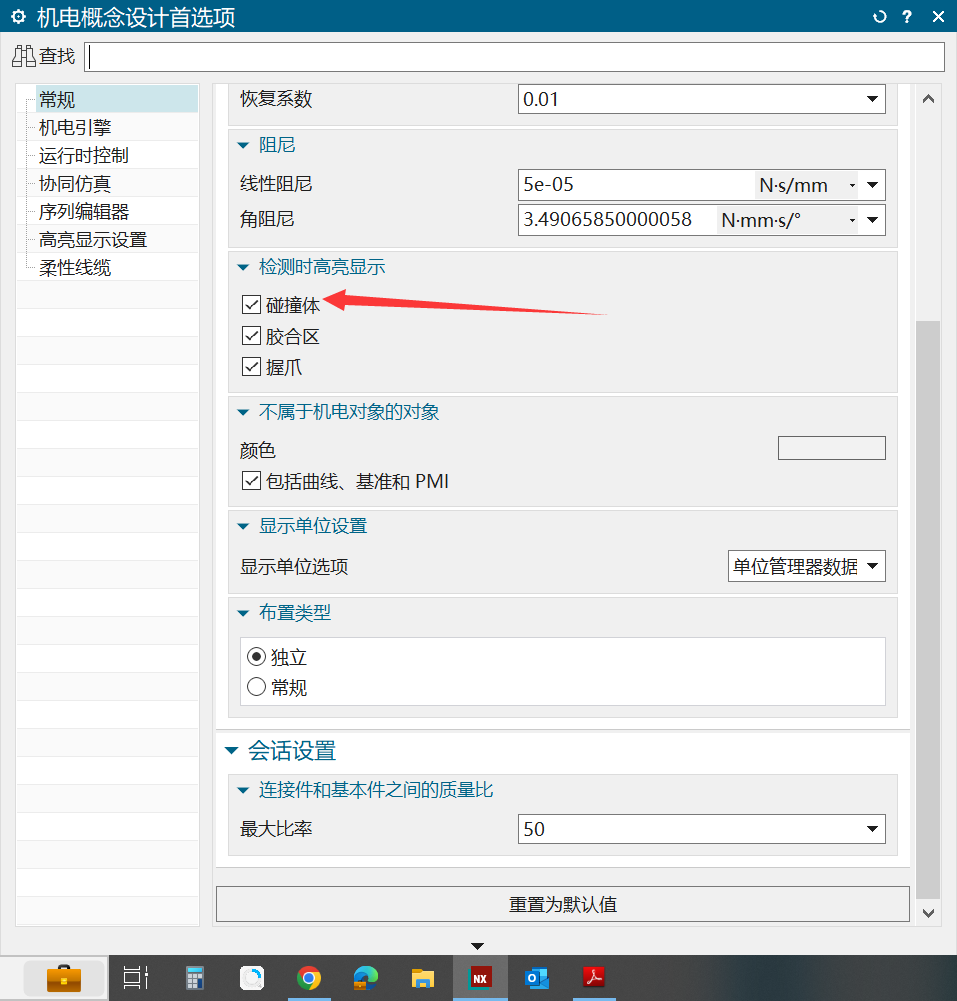
首选项 :首选项 → 机电概念设计首选项,仅针对本次启动
-

-
基本对象:
A、刚体:受力的作用的体(比如重力、推力....),具备:质量(质心)、惯性等特性
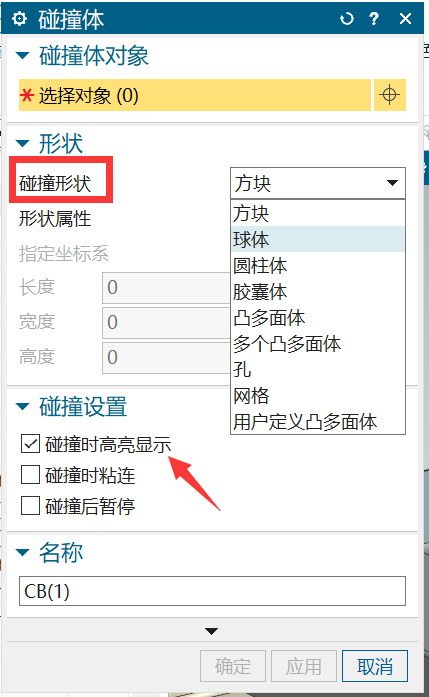
B、碰撞体:先设置为刚体,再设置为碰撞体。如果两个相撞的体,没有设置为[碰撞体],则会相互穿过。
注:①为了减少不稳定的风险(穿透、粘连、抖动),建议尽可能使用简单形状设置碰撞形状(方、柱、凸体)
②已经确定的、比较有把握的碰撞体,可以取消“碰撞时高亮显示”;多的话,可以通过【首选项】→【常规】→批量勾选取消....
C、传输面:将“平面”转化为“传送带”
注:① 一旦有“碰撞体”放在“传输面”上,则会按照“传输面”的速度&方向发生传送
②“传输面”、“碰撞体”是一一对应的!!!!
③“传输面”必须设置为平面
D、对象源:利用“对象源”,创建重复、循环的工件
触发方式:基于时间 or 每次激活时一次
E、对象变换器:将一个体,变化成另一个形状。如正方体变成圆.....
-
基本运动副:定义刚体之间的关系
-
传感器:
- 碰撞传感器:当有物体与传感器发生碰撞时产生反应
- 距离传感器:????
2、真正设置一个运动之前,先理清楚运动流程、联动状态,固定块等
(没啥好讲的,反正就是每次操作之前自己理吧。)
学习笔记,欢迎指正。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号