Learning Discriminative Model Prediction for Tracking
Learning Discriminative Model Prediction for Tracking
Architecture
dimp主要强调了自己是一个具有端到端学习,并且可以在线更新的架构,因此并不像siamese系列只是计算一下模板和搜索区域的相关性,那样只利用了目标的外观信息,并没有利用背景信息。由此作者设计了一个discriminative learning的架构,经过几次的迭代就能预测一个有效的target model(因为tracking就是需要一种target-specific的信息)。这部分就类似ATOM里面的classification的部分,都是为了更好的区分target和distractor,如下图所示,而回归部分还是利用ATOM里面的IoU predictor.
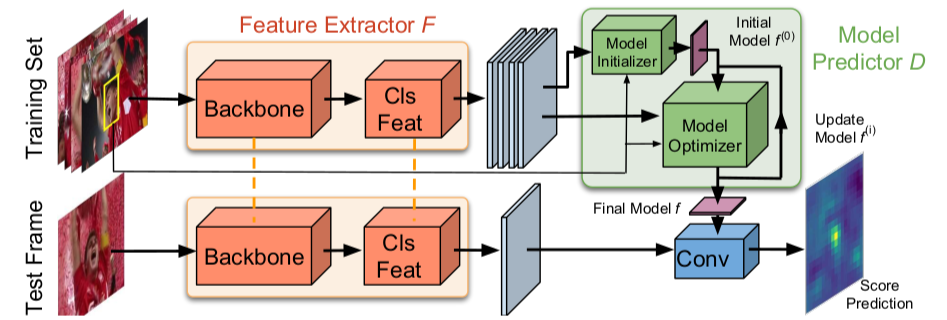
Model Predictor D
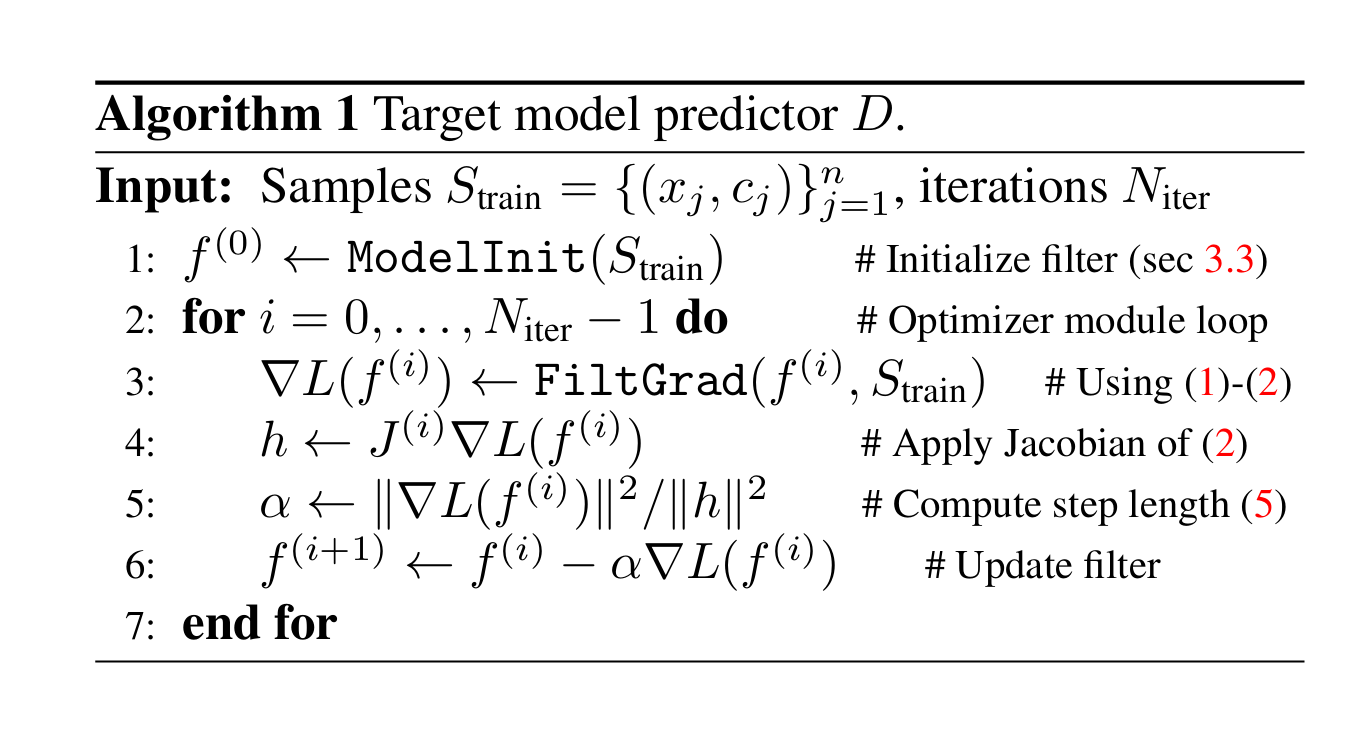
总体的流程就是用Model Initializer初始化一个\(Initial Model f^{(0)}\) ,然后送入Model Optimizer来\(Update Model f^{(i)}\) ,经过\(N_{iter}\)次迭代过后得到Final Model f,在这几次内部迭代过程中,以
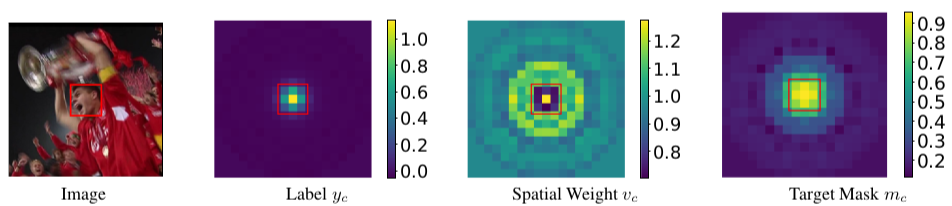
为损失函数来指导我们的优化过程,其中\(m_{c}\)是介于[0,1]之间的target_mask的一个map,\(v_{c}\)是起到空间不同位置赋予权重的spatial weight的一个map,\(y_{c}\)是目标的一个map,下面是他们的一个可视化图,最重要的一点就是他们都是可学习的【下面还要说,其实没什么,就是一层卷积层的输出;其实\(m_{c} s+\left(1-m_{c}\right)\max (0, s)\)用一个LeakyReLU函数就能实现】
(2)中 \(v_c\) 是一个平衡正负样本数量的权重,类似于focal loss中的 \(\alpha\) ,为了看清 \(m_c\) 的作用,对以上损失做简单的推导,
\[r(s,c) = \begin{cases} v_c\ \cdot(s-y_c) &\text{, } s\gt 0 \\ v_c\ \cdot(m_cs-y_c) &\text{, } s\le 0 \end{cases} \]可见,当打分大于0时,残差部分与原来的计算完全相同,而打分小于0时会对score值做一个压缩,使得易分的负样本所占损失的比例大大减小。这篇文章最厉害的不仅仅是提出来这样一个损失,并且对这个损失的优化策略进行了调整,而且在损失中的一些“超参数”如 \(m_c,v_c,\lambda\) 甚至标签设定值 \(y_c\) 也可以通过对数据的学习得到。
优化策略采用最速下降法,传统梯度下降法写作如下:
损失函数可以用二次泰勒展开来拟合,但是这是高维函数,所以可以用下面的标准型来展开,其中 \(Q^{(i)}\) 是对称正定矩阵(Hessian矩阵)
在确定迭代方向为负梯度方向的前提上,需要确定在该方向上使得函数值最小的迭代步长\(\alpha\) ,这就是最速下降法和梯度下降法的区别所在,我们求导一下,可以得到:
推导过程:最速下降法的核心是要迭代得到理想的步长,我们的目标是要走的每一步都可以使 \(L\big(f^{(i+1)}\big)\) 下降到不能再小,因此 \(L\big(f^{(i+1)}\big)\)对\(\alpha\) 求导:
\(\cfrac{d}{d\alpha}\hat L\big(f^{(i)}\big)=\cfrac{d}{d\alpha}\hat L\big(f^{(i)}-\alpha\nabla L(f^{(i)})\big)=0\)
推导过程如下
\[\begin{aligned} \text{L}(f)&\approx\hat{\text{L}}(f)& \\ &=\cfrac{1}{2}\big(f-f^{(i)}\big)^{\text{T}}\text{Q}^{(i)}\big(f-f^{(i)}\big)+\big(f-f^{(i)}\big)^{\text{T}}\nabla L\big(f^{(i)}\big)+L\big(f^{(i)}\big)\\ \cfrac{d}{d\alpha}\hat L\big(f^{(i)}\big) &=\cfrac{d}{d\alpha}\hat L\big(f^{(i)}-\alpha\nabla L(f^{(i)})\big)\\ &=\cfrac{d}{d\alpha}\bigg(\cfrac{1}{2}\big(-\alpha\nabla\text{L}(f^{(i)})\big)^{\text{T}}Q^{(i)}\big(-\alpha\nabla\text{L}(f^{(i)})\big)-\big(\alpha\nabla L(f^{(i)})\big)^{\text{T}}\nabla L\big(f^{(i)}\big)+L\big(f^{(i)}\big)\bigg)\\ &=\alpha\big(\nabla\text{L}(f^{(i)})\big)^{\text{T}}Q^{(i)}\big(\nabla\text{L}(f^{(i)})\big)-\big(\nabla L(f^{(i)})\big)^{\text{T}}\nabla L\big(f^{(i)}\big)\\ &=0\\ &\rArr (5) \end{aligned}\]
因为最普通的 \(Q^{(i)}\)就是二阶泰勒标准展开中的海森矩阵(Hessian matrix),但涉及二次导,所以实际编程时用一阶导代替(Guass-Newton法):\(Q^{(i)}=\left(J^{(i)}\right)^{\mathrm{T}} J^{(i)}\),因此在此处, Q^{(i)} 用 \(J^TJ\) 代替 \(Q^{(i)}=\left(J^{(i)}\right)^{\mathrm{T}} J^{(i)}\) 代入 \(\alpha\) 式中有:
令 \(h=J^{(i)}L(f^{(i)})\) ,则 \(\alpha\larr ||\nabla L\left(f^{(i)}\right)||^2/||h||^2\),更新策略为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号