
移动机器人建图与导航代码实现——3.Path Tracking
Path Tracking
这一部分利用极坐标下的线性控制器完成路径跟踪,主要思路就是把路径拆开,变成p2p问题,即从当前姿态到目标姿态。
极坐标下的线性控制器
设速度\(v\),角速度\(\omega\),则有两轮差速机器人在惯性坐标系下的模型
如图转换到误差极坐标系下
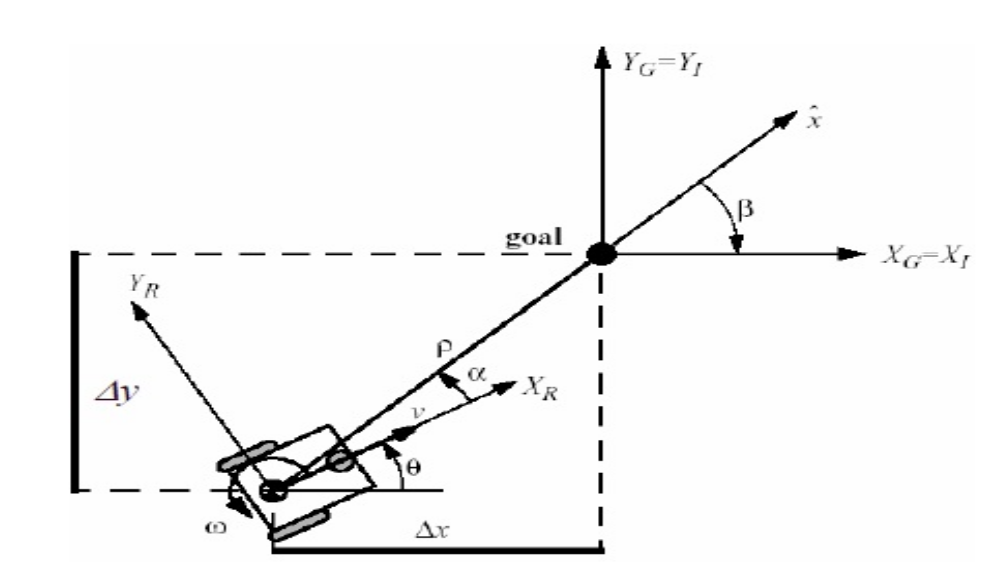
\(\rho=\sqrt{\Delta x^2+\Delta y^2}\)
\(\alpha=-\theta+arctan2(\Delta y, \Delta x)\)
\(\beta=-\theta-\alpha\)
设计线性控制器
\(v = k_{\rho}\rho\)
$\omega = k_{\alpha}\alpha + k_{\beta}\beta $
近似化以后
求出特征多项式\((\lambda+k_{\rho})[\lambda^2+\lambda(k_{\alpha}-k_{\rho})-k_{\rho}k_{\beta}]\)
从而得到收敛条件
\(k_{\rho}\ge 0, k_{\beta}\le 0, k_{\alpha}-k_{\rho}\ge 0\)
实际上,静态的参数容易使机器人陷入局部极值,我们做了动态调参。当\(\rho\)比较大时,我们希望\(\alpha\)影响更大,反之希望\(\beta\)影响更大,同时希望不出现突变,因此设定了一个阈值\(th\),将控制器改为
\[\omega=
\begin{cases}
(\frac{\rho}{th})^2 k_{\alpha}\alpha + k_{\beta}\beta & \rho < th\\
k_{\alpha}\alpha + (\frac{th}{\rho})^2 k_{\beta}\beta & \text{else}
\end{cases}\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号