
摘要: 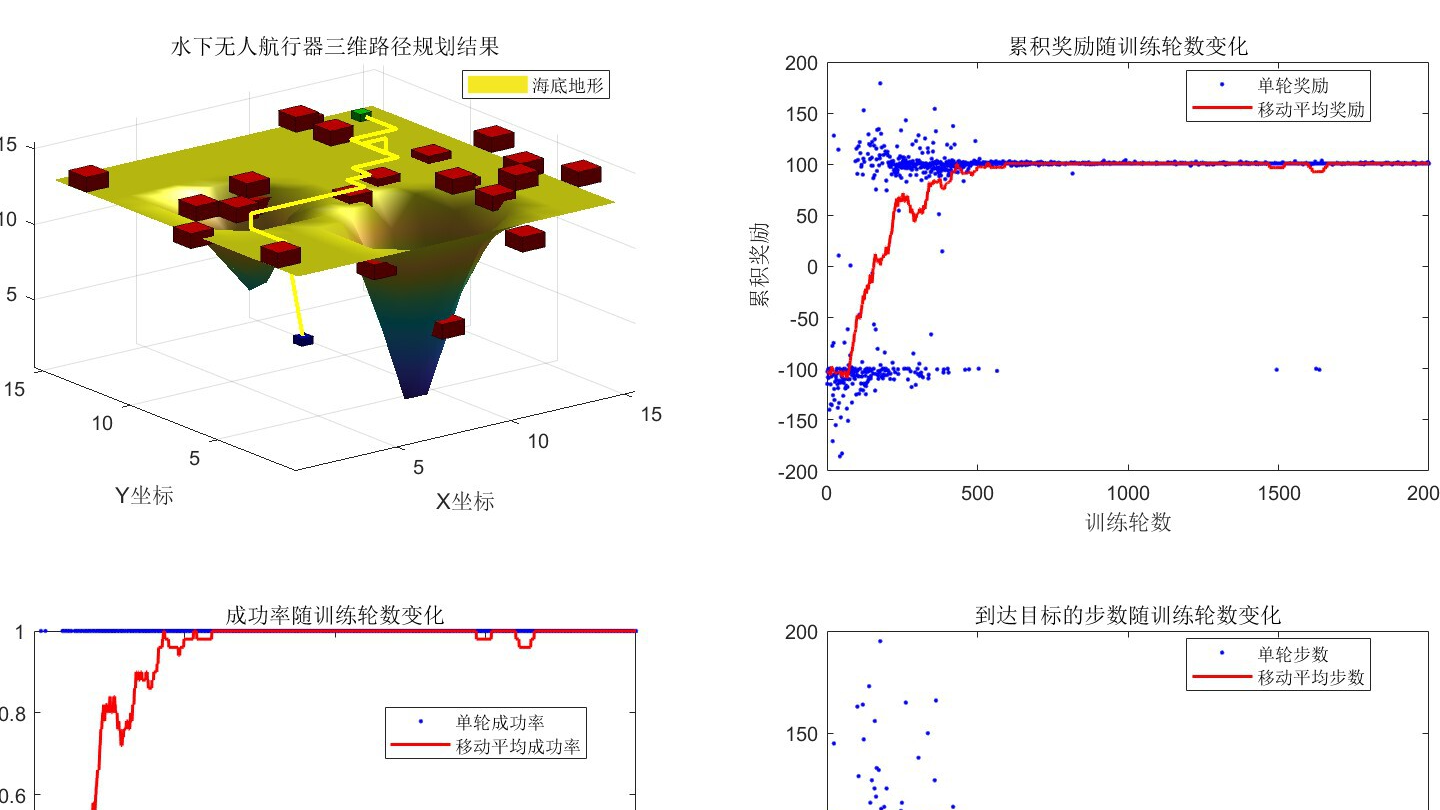 1.引言 水下无人航行器(Unmanned Underwater Vehicle, UUV)的三维路径规划与避障是海洋工程领域的核心问题,其目标是在复杂水下环境(含礁石、沉船等静态障碍物及洋流等动态干扰)中,自主生成一条从起点到目标点的最优路径(满足最短距离、最低能耗等约束),并实时避开障碍物。强化 阅读全文
1.引言 水下无人航行器(Unmanned Underwater Vehicle, UUV)的三维路径规划与避障是海洋工程领域的核心问题,其目标是在复杂水下环境(含礁石、沉船等静态障碍物及洋流等动态干扰)中,自主生成一条从起点到目标点的最优路径(满足最短距离、最低能耗等约束),并实时避开障碍物。强化 阅读全文
1.引言 水下无人航行器(Unmanned Underwater Vehicle, UUV)的三维路径规划与避障是海洋工程领域的核心问题,其目标是在复杂水下环境(含礁石、沉船等静态障碍物及洋流等动态干扰)中,自主生成一条从起点到目标点的最优路径(满足最短距离、最低能耗等约束),并实时避开障碍物。强化 阅读全文
posted @ 2026-01-18 18:26
我爱C编程
阅读(8)
评论(0)
推荐(0)
摘要: 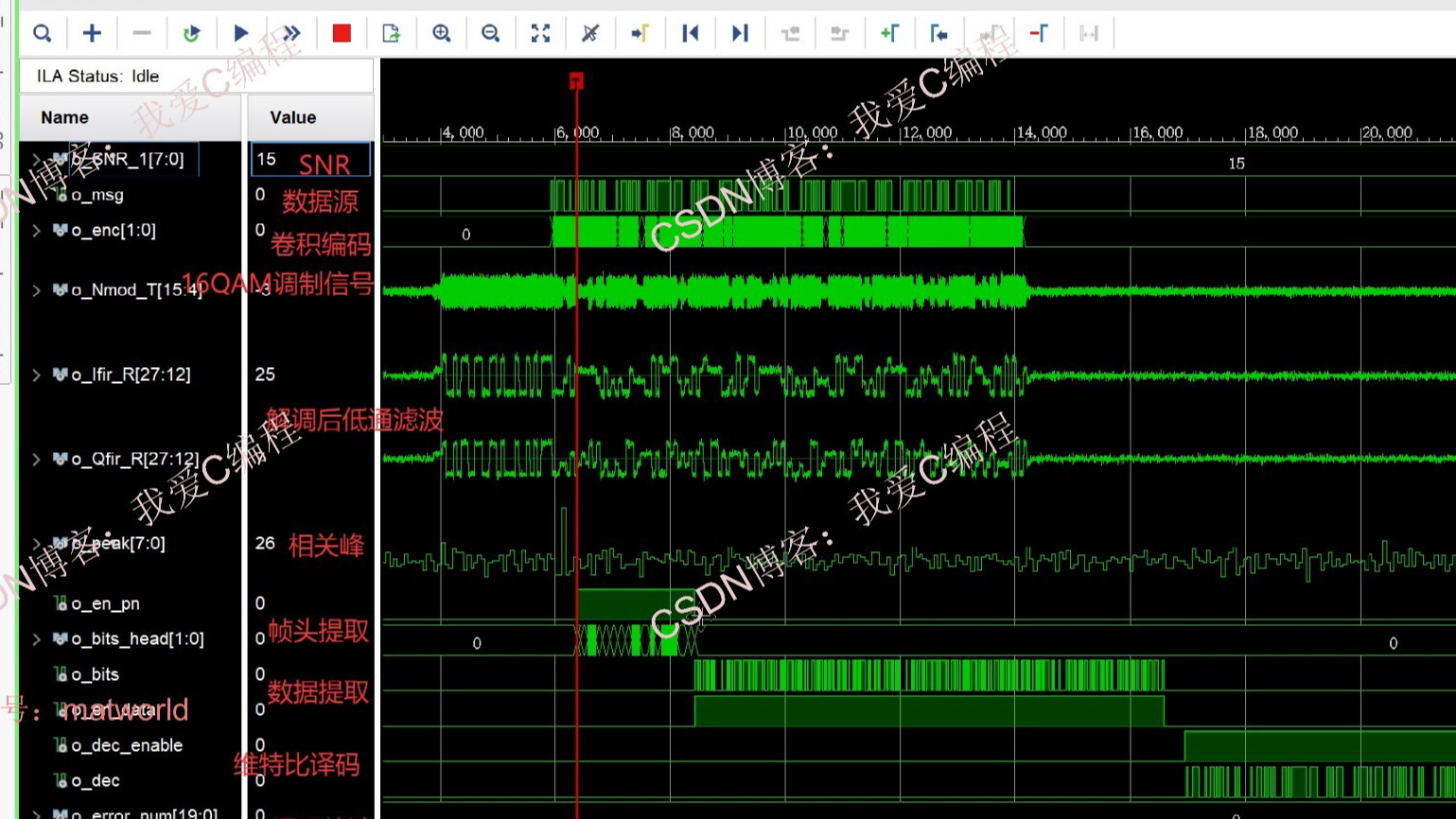 1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
posted @ 2026-01-18 16:55
我爱C编程
阅读(2)
评论(0)
推荐(0)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号