

递推最小二乘参数辨识:原理、实现与代码详解
递推最小二乘参数辨识:原理、实现与代码详解
引言:为什么需要参数辨识?
在控制系统、信号处理和系统建模领域,我们经常面临这样的问题:给定一个"黑箱"系统,我们能够测量其输入和输出信号,但不知道系统内部的具体数学模型。参数辨识技术就是解决这类问题的关键工具。递推最小二乘法(Recursive Least Squares, RLS)作为最经典的在线辨识算法之一,以其计算效率高、适用于实时系统等优点,在工程实践中得到广泛应用。
本文将深入解析递推最小二乘法的原理,并通过三个完整的MATLAB代码示例,详细展示其实现过程。
一、递推最小二乘法基本原理
1.1 系统模型表示
考虑离散时间系统,通常可用以下差分方程描述:
y(k) + a₁y(k-1) + ... + a_na y(k-na) =
b₀u(k-d) + b₁u(k-d-1) + ... + b_nb u(k-d-nb) + e(k)
其中:
- y(k) 是系统在时刻k的输出
- u(k) 是系统在时刻k的输入
- d 是系统延迟
- e(k) 是测量噪声
- a₁,..., a_na 和 b₀,..., b_nb 是待辨识的系统参数
写成向量形式:
y(k) = φ(k)ᵀθ + e(k)
其中:
φ(k) = [-y(k-1), ..., -y(k-na), u(k-d), ..., u(k-d-nb)]ᵀ
θ = [a₁, ..., a_na, b₀, ..., b_nb]ᵀ
1.2 最小二乘法的递推形式
传统的最小二乘法需要处理所有历史数据,计算量大且不适合在线应用。递推最小二乘法通过迭代更新,每次只处理新数据,大大提高了计算效率。
递推公式如下:
K(k) = P(k-1)φ(k)[1 + φ(k)ᵀP(k-1)φ(k)]⁻¹
θ̂(k) = θ̂(k-1) + K(k)[y(k) - φ(k)ᵀθ̂(k-1)]
P(k) = P(k-1) - P(k-1)φ(k)[1 + φ(k)ᵀP(k-1)φ(k)]⁻¹φ(k)ᵀP(k-1)
其中:
- K(k) 是增益矩阵
- P(k) 是协方差矩阵
- θ̂(k) 是k时刻的参数估计值
二、代码结构解析
2.1 代码文件组织
提供的代码包含三个文件:
- example.m - 示例程序,展示RLS在仿真系统中的应用
- main.m - 主程序,适用于实际数据处理
- RecursiveLeastSquares.m - RLS核心算法函数
2.2 系统建模与初始化(example.m分析)
%% Example Recursive Least Squares %%
clc
close all
clear all
%% 系统定义
Gs = tf([0.5],[1 1 1]); % 实际连续系统
Ts = 0.2; % 采样时间
Gz = c2d(Gs,Ts); % 离散化
这部分代码创建了一个二阶连续系统,并将其离散化。离散化是数字控制系统分析和设计的关键步骤。
2.3 阶次确定与参数提取
%% 阶次计算
num = get(Gz,'num');
den = get(Gz,'den');
delay = get(Gz,'iodelay');
% 提取多项式系数
Az = cell2mat(den);
Az = Az./Az(1); % 归一化:[1 a1 a2 ... ana]
% 处理延迟
if delay >0
Bz = [zeros(1,delay),cell2mat(num)]./Az(1);
else
Bz = cell2mat(num)./Az(1);
end
这段代码展示了如何从传递函数对象中提取分子、分母多项式和延迟信息,为参数辨识做准备。
2.4 延迟检测算法
% 检测延迟d(Bz中前导零的数量)
ind = find(Bz == 0);
test = isempty(ind);
if test == 1
d = 0;
elseif ind(1) == 1
d = 1;
elseif ind(1)~= 1
d = 0;
end
% 处理多个连续零的情况
if length(ind)>1
for i=1:length(ind)-1
if ind(i+1)-ind(i) == 1
d = i+1;
else
break
end
end
end
这是一个实用的延迟检测算法,通过查找B(z)多项式中的前导零来确定系统延迟。
三、RLS核心算法实现
3.1 数据向量构建(Regressor Vector)
function [a,b,P,Theta,phi,K] = RecursiveLeastSquares(U,Y,d,nb,na,P,Theta,phi,n)
% 构建数据向量φ
for j = 1:nu
if j <= na % y的项
if (n-j)<=0
phi(n,j) = 0; % 初始时刻,历史数据不足时补零
else
phi(n,j) = -Y(n-j); % 输出历史值
end
else % u的项
if (n-d-(j-(na+1)))<=0
phi(n,j) = 0; % 考虑延迟,历史数据不足时补零
else
phi(n,j) = U(n-d-(j-(na+1))); % 输入历史值
end
end
end
数据向量φ(k)的构建是RLS算法的关键步骤之一。它包含了系统的历史输入输出信息,按照模型的阶次和延迟排列。
3.2 RLS递推更新核心
% RLS递推更新
K = P*phi(n,:)'*inv(1+phi(n,:)*P*phi(n,:)'); % 计算增益矩阵
Theta = Theta + K*(Y(n)-phi(n,:)*Theta); % 参数更新
P = P - P*phi(n,:)'*inv(1+phi(n,:)*P*phi(n,:)')*phi(n,:)*P; % 协方差矩阵更新
% 提取参数
a = Theta(1:na); % 分母多项式系数
b = Theta(na+1:end); % 分子多项式系数
这三行代码实现了RLS的核心递推公式:
- 增益计算:确定新数据对参数更新的"权重"
- 参数更新:基于预测误差修正参数估计
- 协方差更新:反映参数估计的不确定性
四、递推流程分析
4.1 时间递推结构
% 在主程序中的递推循环
Theta = zeros(nu,1); % 初始参数
P = 10^6 * eye(nu,nu); % 初始协方差矩阵
Phi = zeros(1,nu); % 初始数据向量
for i = 1 : length(U) % 时间递推循环
[a(:,i),b(:,i),P,Theta,Phi,K(:,i)] = ...
RecursiveLeastSquares(U(1:i),Y(1:i),d,nb,na,P,Theta,Phi,i);
end
这个for循环体现了RLS的时间递推特性:
- 每个时间步处理一组新的输入输出数据
- 参数估计不断更新,无需保存所有历史数据
- 适合在线、实时应用
4.2 协方差矩阵的初始化
P = 10^6 * eye(nu,nu); % 初始协方差矩阵
这里将协方差矩阵初始化为一个很大的单位矩阵,反映了对初始参数估计的高度不确定性。随着数据积累,P矩阵会逐渐减小,表明参数估计越来越确定。
五、参数辨识结果与验证
5.1 参数收敛性分析
% 参数收敛图
figure
hold on
for m = 1:Sa(1)
plot(t,a(m,:),'color',colors(m),'LineWidth',1.5)
plot(t,A(m)*ones(length(t),1),'--','color','k') % 真实值参考线
grid on
title('Parameters a_i Convergence')
xlabel('time (sec.)')
ylabel('Parameter Value')
end
代码绘制了参数a_i随时间的变化曲线,并与真实值(虚线)对比,直观展示RLS算法的收敛性能。
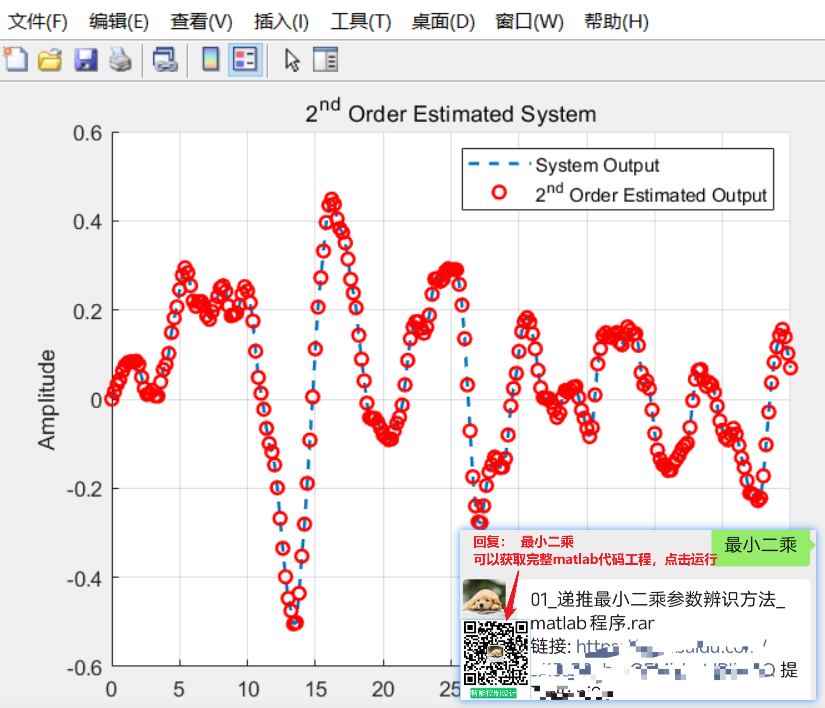
5.2 模型验证
% 使用辨识得到的参数构建估计系统
y = lsim(tf(b(:,end)',[1 a(:,end)'],Ts,'iodelay',d,'variable','z^-1'),U,t);
% 对比实际输出与估计输出
figure
grid on
hold on
plot(t,Y(1:end),'--','LineWidth',1.5) % 实际系统输出
plot(t,y(1:end),'o','LineWidth',1.5,'color','r') % 估计系统输出
通过比较实际系统输出和基于辨识参数的系统输出,可以验证辨识结果的质量。
六、实际应用注意事项
6.1 数据预处理
在实际应用(main.m)中,需要注意:
- 数据质量:确保输入输出数据无异常值
- 持续激励:输入信号应包含足够频率成分以激励所有模态
- 噪声处理:考虑测量噪声的影响,可能需要改进算法
6.2 算法改进方向
基本RLS算法可能存在以下问题:
- 数据饱和:老数据权重与新数据相同,可能不适应时变系统
- 数值稳定性:协方差矩阵可能失去正定性
改进方法包括:
- 带遗忘因子的RLS:λRLS,给新数据更高权重
- 平方根RLS:提高数值稳定性
- 正则化:防止过拟合
七、RLS在控制系统中的应用价值
7.1 自适应控制
RLS常用于自适应控制系统,如模型参考自适应控制(MRAC)和自校正调节器。通过在线辨识系统参数,控制器可以实时调整以应对系统变化。
7.2 故障检测与诊断
通过监控辨识参数的变化,可以检测系统故障。例如,机械系统的刚度或阻尼参数异常变化可能预示故障。
7.3 系统健康监测
在关键设备(如航空发动机、电力变压器)中,RLS可用于监测系统参数漂移,实现预测性维护。
结论
递推最小二乘法是一种强大而灵活的系统辨识工具。通过本文的代码解析,我们可以看到:
- 原理与实现对应:RLS的数学公式直接对应代码实现
- 递推特性明确:通过时间循环实现参数在线更新
- 实用性高:代码结构清晰,易于修改适应不同应用
提供的三个MATLAB文件构成了一个完整的RLS辨识框架:
- example.m 提供了仿真示例和验证方法
- main.m 展示了实际数据处理流程
- RecursiveLeastSquares.m 是核心算法,可独立使用
理解这些代码不仅有助于掌握RLS算法,也为进一步学习更先进的自适应滤波和系统辨识技术奠定了基础。在实际工程应用中,可以根据具体需求调整算法参数和改进实现方式,以获得更好的辨识性能。
版权声明:本文代码示例仅供学习使用,实际应用时请根据具体需求进行修改和优化。递推最小二乘法是系统辨识领域的经典方法,掌握其原理和实现对控制工程师至关重要。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号