ROS:Ubuntu18LST ros及qtgui开发环境搭建
Ubuntu18.04 LST和ros
1.安装ubuntu
-
准备好一个大于16GB的u盘
-
下载ubuntu镜像:https://ubuntu.com/download/alternative-downloads(选择18.04 lst长期版本)
-
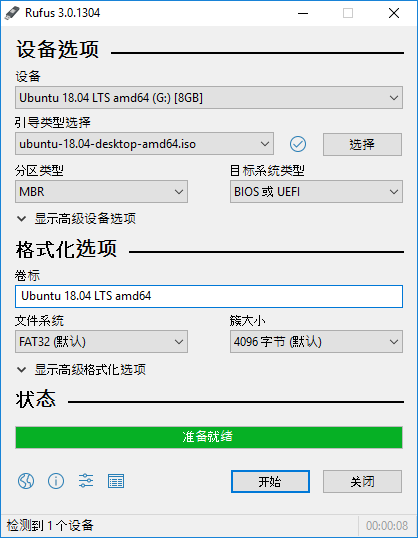
下载Rufus用于制作启动盘:https://rufus.ie/zh/
-
运行软件,选择进行开始制作ubuntu启动盘
2.安装ros系统和工具
- 打开ros官方主页:http://wiki.ros.org/noetic/Installation/Ubuntu
- 依次运行如下命令
#设置软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
#设置软件密钥
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
#更新软件包
sudo apt update
#安装ros系统
sudo apt install ros-noetic-desktop-full
#只在机器人上跑的基础系统,没有GUI工具
#sudo apt install ros-noetic-ros-base
#环境设置
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#安装ros构建软件依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
#初始化rosdep工具,和软件包有关(需要****)
sudo rosdep init
rosdep update
# ros和qt
前提:主机以及正确安装了ros系统及相关组件。
参考:https://ros-qtc-plugin.readthedocs.io/en/latest/_source/How-to-Install-Users.html
0.安装QT5.9
这个步骤可以跳过,这只是一种方法。因为依赖库下载很容易出错,所以我们选择另一种方法
国内的QT下载地址:
- 中国科学技术大学:http://mirrors.ustc.edu.cn/qtproject/
- 清华大学:https://mirrors.tuna.tsinghua.edu.cn/qt/ 或https://mirrors.tuna.tsinghua.edu.cn/qt/archive/qt/5.9/5.9.0/
- 北京理工大学:http://mirror.bit.edu.cn/qtproject/
- 中国互联网络信息中心:https://mirrors.cnnic.cn/qt/
依赖库
sudo add-apt-repository ppa:levi-armstrong/qt-libraries-xenial
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt update && sudo apt install qt57creator
sudo apt install qt57creator-plugin-ros
1.安装qtcreate-ros
-
添加执行权限,下一步下一步直到安装成功。
-
安装依赖,用于创建ROS-QT GUI模板:
sudo apt-get install ros-melodic-qt-create #melodic代表是ubuntu18lst版本下的ros版本
sudo apt-get install ros-melodic-qt-build
2.创建工程
- 创建工程
mkdir -p qt_ws/src
cd qt_ws/src
catkin_create_qt_pkg basic_pk
cd ..
catkin_make
-
创建qt工程
-
qtcreator-ros > ** 新建项目 *> 其他项目ROSWorkspace
-
Name:qt_ws ==> Build System:CatkinMake ==> Workspace Path:刚刚创立的目录qt_ws/src
-
-
配置项目运行设置
- 点击项目 ==> Run
- 自定义进程步骤:命令:catkin_make。
- 运行配置:rosrun basic_pk basic_pk
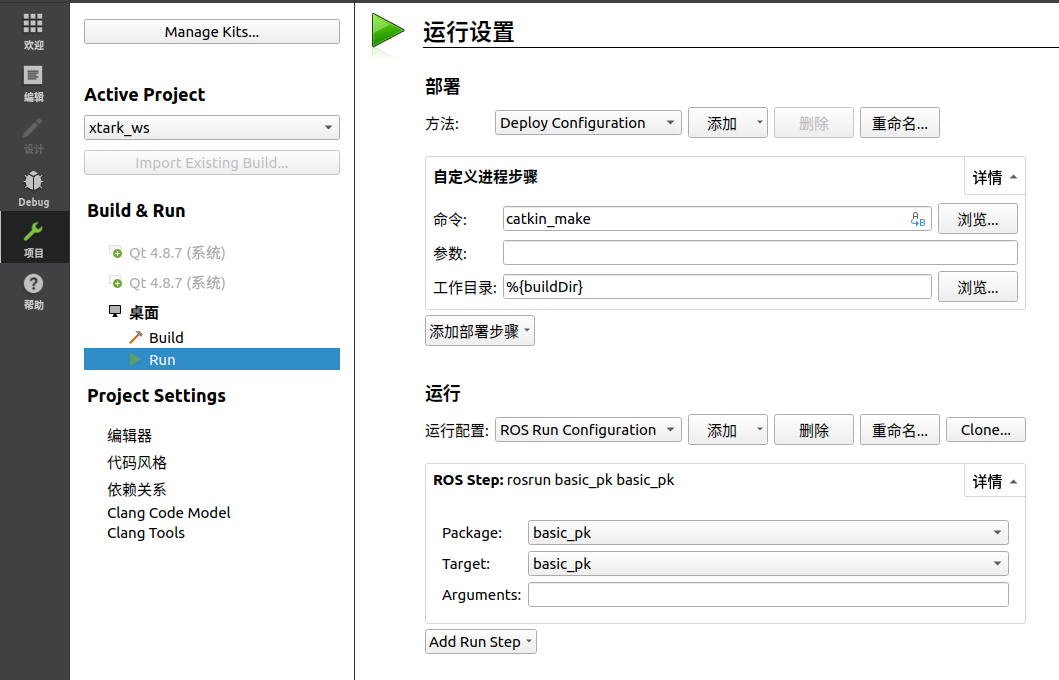
- 点击运行按钮,能正确运行程序就代表环境配置成功

 浙公网安备 33010602011771号
浙公网安备 33010602011771号