Stixel_World(single)学习笔记
1. 算法背景
Q: 如何有效处理数以百万的视差图数据(提供了每个像素的精确深度信息)? 以及如何在大量数据中找到所有相关的障碍物?- 提出方法
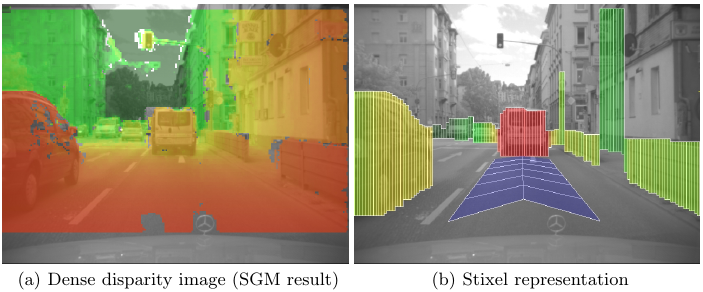
“ stixel_world ”, It takes into account that the free space in front of ve-hicles is limited by objects with almost vertical surfaces. These surfaces are approximated by adjacent rectangular sticks of a certain width and height.
2. 算法核心
- 基础 – SGM(Semi-Global-Matching) 生成视差图
-
实质–a medium level representation that bridges the gap between the pixel and the object level.
-
表现形式:
N: Each stixel is defined by its 3D position relative to the camera and stands vertically on the ground, having a certain height. Each stixel limits the free space and approximates the object boundaries ! N: For example, the width of the stixels is set to 5 pixels, a scene from a VGA image can be represented by 640/5=128 stixels only. -
stixel-world 计算方法

1.根据视差图数据计算图像的占用网格,如图2(a), 并将此次计算结果应用与 Free Space 的初始化计算.
采用的方法: DP 求取全局最优; 得到图2(c), 图3(a)的结果.
2.采用DP估计障碍物最优高度分割值, 图3(d)
3.Finally, a robust averaging of the disparities of each stixel yields a precise model of the scene.
-
随机占用网格的计算方法
N: The stereo disparities are used to build a stochastic occupancy grid. An occupancy grid is a two-dimensional array or grid which models occupancy evidence of the environment. N: 占用网格的第一次介绍是在文献[1], 占用网格算法的回顾见文献[2];在本文中, 采用极坐标占用网格, 用图像的列表示角坐标, 视差图用于表示范围, 另外, 我们不是假设平面道路,而是通过在[3]中提出的将B样条曲面拟合到3D数据来估计道路姿态。 Road-Estimated
-
Free Space 计算方法
N1: 从图2中视差图的占用网格图可以看出, 自由空间的搜索可以从图像的底部开始,直到找到占用网格, 而在这之前搜索过的空间就是自由空间(从相机的视野角度出发). 在这里, 我们使用DP的方法, 从左边到右边搜索切割出一个最优的占用网格图(自由空间).通过使用惩罚深度跳跃的成本来施加空间平滑度,而通过惩罚当前解决方案与预测的偏差的成本来施加时间平滑性 [4]
N2: 如果直接在图(a)上直接使用DP, 则可能会忽略背景前的障碍物,如护栏, 只检测到建筑物; 因此, 我们在使用DP之前先提取背景如图2(b). 另外, 每一个自由空间的点, 不仅支出了自由空间的边界, 而且提供了障碍物的位置的 基点.
-
障碍物的高度分割
N1: 在背景和前景之间找到最佳分割, 可以对第一步计算得的代价图像(Cost Image)应用DP去找到障碍物的上边界!
[ 参考文献 ]
[1] Elfes, A.: Sonar-based real-world mapping and navigation. Journal of Robotics and Automation 3(3) (June 1987) 249–265
[2] Thrun, S., Burgard, W., Fox, D.: Probabilistic Robotics. Intelligent Robotics and Autonomous Agents. The MIT Press (2005)
[3] Wedel, A., Franke, U., Badino, H., Cremers, D.: B-spline modeling of road surfaces for freespace estimation. In: Intelligent Vehicle Symposium. (2008)
[4] Badino, H., Franke, U., Mester, R.: Free space computation using stochastic occupancy grids and dynamic programming. In: Workshop on Dynamical Vision, ICCV, Rio de Janeiro, Brazil (October 2007)
