
摘要: 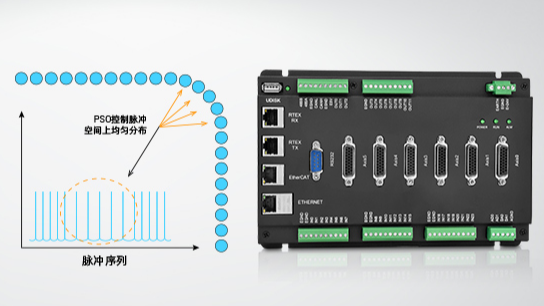 上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。 ZMC460N双总线控制器 一、硬件说明 硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。 PSO功能 阅读全文
上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。 ZMC460N双总线控制器 一、硬件说明 硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。 PSO功能 阅读全文
上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。 ZMC460N双总线控制器 一、硬件说明 硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。 PSO功能 阅读全文
posted @ 2022-08-08 14:55
正运动技术
阅读(336)
评论(0)
推荐(0)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号