DS博客作业05--查找
0.PTA得分截图

1.本周学习总结(0-4分)
1.1 总结查找内容
查找的基本概念
-
动态查找表:在查找的同时对表做修改操作
-
静态查找表:在查找中不涉及表的修改操作
-
平均查找长度ASL:关键字的平均比较次数
![]()

n:记录的个数
pi:查找第i个记录的概率(通常认为pi = 1 / n)
ci:找到第i个记录所需的比较次数
- ASL还有分为查找成功和查找不成功两种情况
静态查找
- 用于查找运算的顺序表采用数组表示,改数组元素的类型声明如下
#define MAXL <表中最多记录个数>
typedef struct
{
KeyType key; //KeyType为关键字的数据类型
InfoType data;//其他数据
} NodeType;
typedef NodeType SeqList; //顺序表
SeqList R[MAXL];
1.顺序查找
- 顺序查找的基本思路:从表的一端向另一端逐个将元素的关键字与给定值K比较。相等则查找成功,若整个查找表都扫描结束后仍未找到,则查找失败
具体代码如下:
结构体定义:
#define MAXL <表中最多记录个数>
typedef struct
{
KeyType key; //KeyType为关键字的数据类型
InfoType data;//其他数据
} NodeType;
typedef NodeType SeqList[MAXL]; //顺序表
顺序查找算法如下:
int SeqSearch(SeqList R[], int n, KeyType k)
{
int i = 0;
while (i < n && R[i].key != k) //从表头往后找
i++;
if (i >= n) //未找到返回0
return 0;
else
return i + 1;//找到返回逻辑序号i+1
}
算法分析
- 该算法查找第i个元素所需要的关键字比较次数取决于改元素在表中的位置。
- 查找成功时的平均比较次数约为表长的一半:ASL成功=(n+1)/2
- 若k不在表中则需遍历完表,查找n次:ASL不成功=n
- 从代码中可以看出来,由一层循环完成,顺序查找的平均时间复杂度为O(n)
存储结构选择
- 顺序查找优点是算法简单,且对表的结构无特别要求,即顺序表和链表都可。缺点就是查找效率低。
2.折半查找
- 折半查找又称二分查找,它是一种效率较高的查找方法。
- 其前提是:折半查找要求线性表必须是有序表
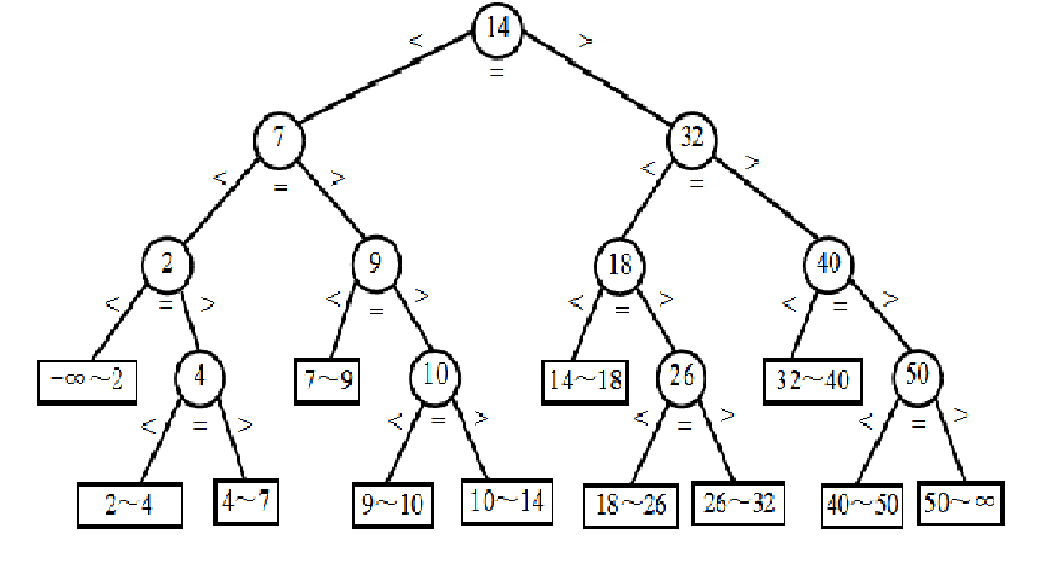
折半查找的过程可用二叉树来描述:
判定树中查找成功对应的结点称为内部结点,查找失败对应的结点称为外部结点
如下图为一棵二叉查找的判定树:

折半查找的基本思路
是设R[low……high]为当前的查找区间,首先确定该区间的中点位置mid=[(low+high)/2],然后将待查的k值与R[mid].key比较,并且不断缩小查找区间。
重复知道找到关键字为k的元素,或者直到查找区间为空,即查找失败。
具体代码
int BinSearch(SeqList R[], int n, KeyType k)
{
int low = 0, high = n - 1, mid;
while (low <= high) //当前区间存在元素时循环
{
mid = (low + high) / 2;
if (R[mid].key == k)//查找成功
return mid + 1;
if (k < R[mid].key)
high = mid - 1;//继续在R[low,mid-1]中查找
else
low = mid + 1;//继续在R[mid+1,high]中查找
}
return 0;//查找失败
}
算法分析
- 计算ASL:
- 计算成功ASL时,分母是内部结点个数,计算不成功ASL时,分母则是查找不成功的所有区间(最好补全区间后再计算,不容易出错)
- 计算单个比较次数要注意查找得到和查找不到的比较次数的区别:

- 计算时间复杂度:
- 由二叉判定树我们可知经历比较的关键字次数恰好为改元素在树中的层数。
- 当n比较大时,判定树看成内部节点的总数为n = 2h - 1、高度为h = log2(n + 1)的满二叉树
则折半查找成功时的平均查找长度:ASL成功=log2(n+1) -1
折半查找在查找失败所需比较的关键字个数不超过判定书的高度,在最坏情况下查找成功的比较次数也不超过判定树的高度
归纳起来,折半查找的时间复杂度为O(log2 n)
存储结构选择
- 由于折半查找需要确定查找的区间,因此利用数组下标更为方便,所以适用于适用顺序表。
哈希表
-
哈希表(Hash Table)又称散列表,是除顺序表存储结构、链接表存储结构和索引表存储结构之外的又一种存储线性表的存储结构。
-
**注意:哈希表是一种存储结构,它并非适合任何情况,主要适合记录的关键字与存储地址存在 *某种函数关系 的数据。
-
对于哈希地址相同的要插入哈希表中的两个元素我们称为哈希冲突(同义词冲突)
-
注意设计哈希表时:哈希表长度与装填因子有关。
哈希函数构造方法
1. 直接定址法
直接定址法是以关键字k本身或关键字加上某个数值常量c作为哈希地址的方法。
优点:计算简单, 并且不可能有冲突发生
缺点:关键字分布不连续将造成内存单元的大量浪费
2. 除留余数法
除留余数法是用关键字k除以某个不大于哈希表长度m的数p所得的余数作为哈希地址的方法。
**p最好是质数(素数)。减少哈希冲突**
哈希冲突解决方法 (开放定址法)
(1)线性探查法
线性探查法的数学递推描述公式为:
d0 = h(k)
di = (di - 1 + 1) mod m(1≤i≤m - 1)
(2)平方探查法
平方探查法的数学描述公式为:
d0=h(k)
di=(d0± i2) mod m (1≤i≤m-1)
(平方探查法是一种较好的处理冲突的方法,可以避免出现堆积现象。它的缺点是不能探查到哈希表上的所有单元,但至少能探查到一半单元。)
哈希表上的运算
结构体
#define MaxSize 100
#define NULLKEY -1
#define DELKEY -2//已删除标志
typedef char * InfoType ;
typedef struct{
int key;// 关键字域
InfoType data;//其他数据域
int count; //探查次数
}HashTable[MaxSize];
具体操作代码
哈希表插入以及创建哈希表
void InsertHT(HashTable ha, int& n, KeyType k, int p)//哈希表插入数据
{
int address,Count=1;
address = k % p;
while (ha[address].key != NULLKEY&&ha[address].key!=DELKEY)//当有过删除操作时,需要注意&&后的判断条件
{
address = (address + 1) % p;
Count++;
}
ha[address].key = k; ha[address].count = Count;
}
void CreateHT(HashTable ha, KeyType x[], int n, int m, int p) //创建哈希表
{
int k;//要插入的关键字
for (int i = 0; i < m; i++)//创建哈希表,表长为m
{
ha[i].key = NULLKEY;
ha[i].count = 0;//初始化探测次数都为0
}
for (int i = 0; i < n; i++)//将n个数据插入哈希表
{
k = x[i];
InsertHT(ha, n, k, p);
}
}
哈希表查找
int SearchHT(HashTable ha, int p, KeyType k) //在哈希表中查找关键字k
{
int address,i=1;//计算探测次数
address = k % p;//初次计算地址
uns_count++;//表示查找失败次数
while (ha[address].key != k && ha[address].key != NULLKEY)
{
if (i >= p) break;
address = (address + 1) % p;//注意此处应是在表中探测查找所以%m,而该题m==p
uns_count++; i++;
}
if (ha[address].key == k)return address;//查找失败
else return -1;
}
哈希表删除
int DeleteHT(HashTable ha,int p,int k,int &n)
{ int adr;
adr=SearchHT(ha,p,k);
if(adr!=-1){
ha[adr].key=DELKEY;//逻辑删除,该元素贴删除标记
n--;
return 1; }
else return 0;
哈希链的相关操作
哈希链即采用拉链法解决冲突的哈希表。
结构体定义
typedef struct HashNode{
int key;
struct HashNode *next;
}HashNode,* HashTable;
HashTable ht[MAX];
注意学习堆区建哈希链的方法
struct Node//链表的结构体
{
ElementType Element;
struct ListNode *Next;
} ListNode, *List;
typedef struct
{
int TableSize;//哈希表的大小,即哈希表中链表的个数
List Lists;//链表指针数组,数组的每个元素为一个链表指针
}HashTable ;
HashTable *H;
H=new HashTable ;
H->Lists=new List[H->TableSize];
H->Lists[i]=new ListNode;
动态查找
1.二叉搜索树(二叉排序树)
-
其定义为二叉排序树或者是空树。若左子树非空则左子树上的所有节点关键字均小于根结点关键字,若右子树非空,则右子树上的所有节点关键字均大于根结点关键字
-
中序遍历的二叉排序树是一个递增序列
-
结构体定义
typedef struct node
{
KeyType key; //关键字项
InfoType data; //其他数据域
struct node* lchild,* rchild; //左右孩子指针
} BSTNode
-即至少包括关键字和左右孩子
二叉搜索树的相关操作
1.1二叉搜索树的查找
- 二叉搜索树,和二分查找类似,也是一个逐步缩小查找范围的过程。
具体代码
BSTNode *SearchBST(BSTNode *bt,KeyType k)
{
if (bt==NULL || bt->key==k) //递归终结条件
return bt;
if (k<bt->key)
return SearchBST(bt->lchild,k); //在左子树中查找
else
return SearchBST(bt->rchild,k); //右子树中查找
}
- 递归进行查找,若bt=NULL,则说明查找失败,返回空指针。因此要注意初始化时,若创建新结点注意初始化左右孩子为空
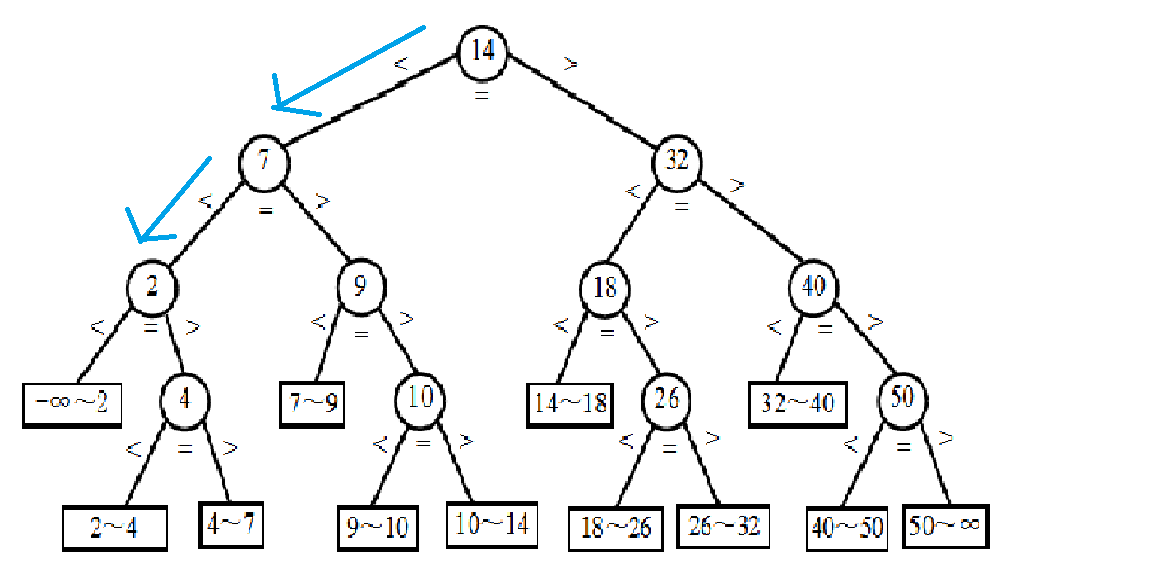
二叉排序树的中序序列是一个递增有序序列因此:
- 根结点的最左下结点是关键字最小的结点
KeyType maxnode(BSTNode* p)//返回一棵二叉排序树中最大节点关键字
{
while (p->rchild != NULL)
p = p->rchild;
return(p->data);
}
- 根结点的最右下结点是关键字最大的结点
KeyType minnode(BSTNode* p)//返回一棵二叉排序树中的最小节点关键字
{
while (p->lchild != NULL)
p = p->lchild;
return(p->data);
}
1.2二叉搜索树的插入和创建
二叉搜索树插入思路
-
插入的元素一定在叶结点上,因此为空则说明该结点为叶结点所以插入
-
该插入过程就是边查找边插入,因此递归函数插入,最后结果为插入是否成功
(同时表示了,若插入成功说明原表中无此关键字,失败则说明已存在)
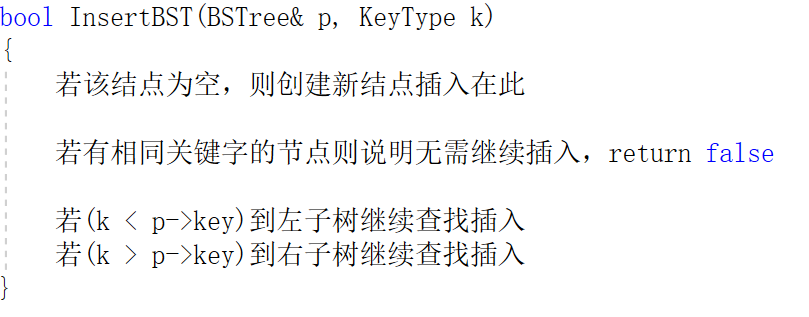
具体代码
bool InsertBST(BSTree& p, KeyType k)
{
if (p == NULL) //若该结点为空,则创建新结点插入在此
{
p = new BSTNode;
p->key = k; p->lchild = p->rchild = NULL;
return true;
}
else if (k == p->key) //若有相同关键字的节点则无需插入return false
return false;
else if (k < p->key)
return InsertBST(p->lchild, k); //到左子树继续查找插入
else
return InsertBST(p->rchild, k);//到右子树继续查找插入
}
二叉搜索树的创建思路
- 即为不断的调用插入函数,但要注意,二叉排序树初始是一棵空树,然后根据序列不断插入
具体代码
BSTNode* CreatBST(KeyType K[],int n) //返回树根指针
{
BSTNode* bt = NULL; //初始时bt为空树
int i = 0;
while (i < n)
{
InsertBST(bt,K[i]); //将A[i]插入二叉排序树T中
i++;
}
return bt; //返回建立的二叉排序树的根指针
}
同时需要注意的一点是,正是由于插入是插入在叶子结点,尽管关键字一样,若插入序列顺序不同,所建出的二叉排序树也可能长得不同

1.3二叉搜索树的删除
二叉搜索树删除的思路:查找到要删除的结点后分情况讨论(因此在也是边查找,在查找的框架下进行删除操作)
删除过程的分情况讨论:
- 被删除的节点是叶子节点。
则直接删除该结点即可
- 被删除的节点只有左子树或者只有右子树
则仅有的子树代替该结点
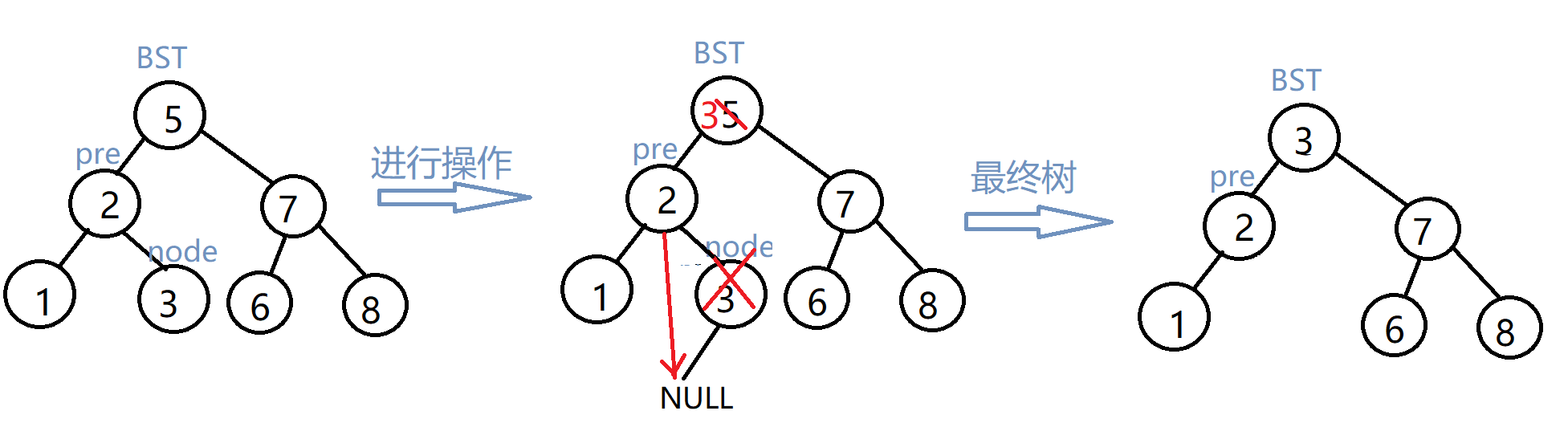
- 被删除的节点既有左子树,也有右子树。
从左子树中找最大关键字结点(即中序前驱),或从右子树中找到最小关键字结果(即中序后继),来代替该结点
(之所以选取中序前驱点或者是中序后继点来代替,是为了保持该树排序关系)
具体代码
BinTree Delete(BinTree BST, ElementType X)
{
BinTree pre,node;
BinTree p;//用来保存要删除的结点
if (!BST)//若空,则说明查找失败
{
printf("Not Found\n");return BST;
}
if (X > BST->Data) BST->Right=Delete(BST->Right, X);
else if (X < BST->Data)BST->Left= Delete(BST->Left, X);
else//相等即找到
{
if (!BST->Left && !BST->Right) { p = BST; free(p); BST=NULL; } //若为叶子直接删除
else if (!BST->Left && BST->Right) { p = BST; BST = BST->Right; free(p); }//右子树存在,右子树直接取代该结点
else if (BST->Left && !BST->Right) { p = BST; BST = BST->Left; free(p); }//左子树存在,左子树直接取代该结点
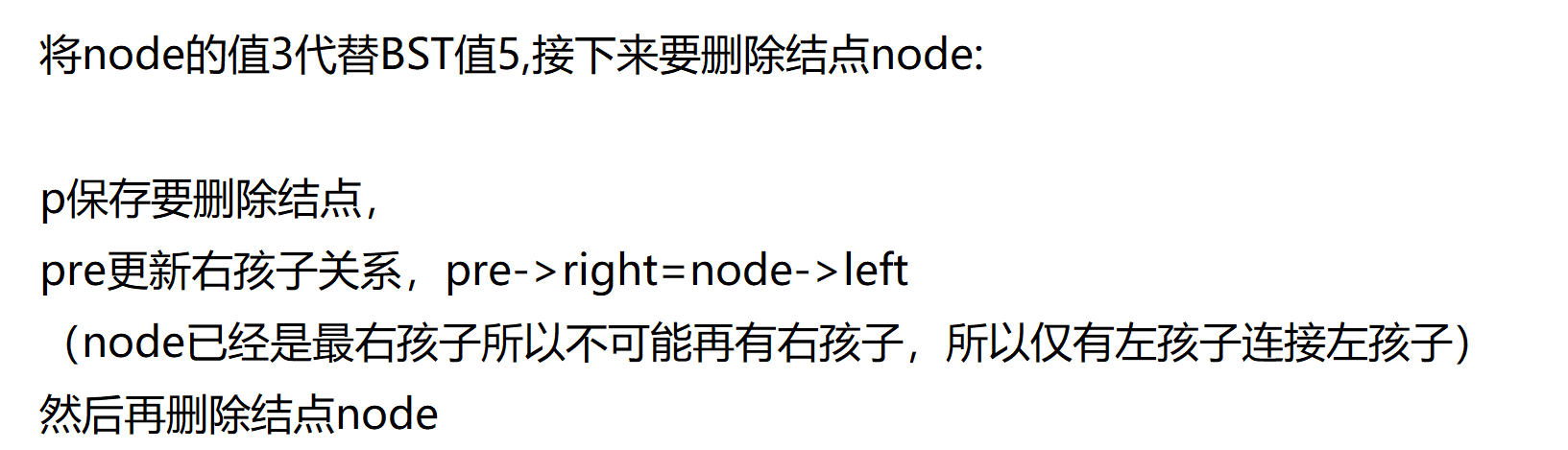
else//即左右子树都存在,找前驱node或者后继取代即可
{
pre = BST; node = BST->Left;//由于后面要删除,pre保存代替点的前驱关系,node遍历找到中序前驱结点
while (node->Right)//找到左子树中最大关键字结点
{
pre = node; //注意也要更新pre关系
node = node->Right;
}
BST->Data = node->Data; //替代值
p = node;
pre->Right = node->Left;//前驱node无右孩子,将其左孩子直接连上其前继关系
free(p);
}
}
return BST;
}
接下来,图示具体说明有左右孩子时,如何删除:


递归函数的写法
- 写递归函数时,将左右孩子都有的情况另写一个函数
int DeleteBST(BSTree& bt, KeyType k)//先查找再调用删除函数Delete()
{
if (bt == NULL) return 0; //空树删除失败
else
{
if (k < bt->key) //递归在左子树中删除为k的节点
return DeleteBST(bt->lchild, k);
else if (k > bt->key) //递归在右子树中删除为k的节点
return DeleteBST(bt->rchild, k);
else//删除*bt节点
{
Delete(bt);
return 1;
}
}
}
void Delete(BSTreee& p) //从二叉排序树中删除*p节点,左右子树都有情况下调用函数Delete1()
{
BSTNode* q;
if (p->rchild == NULL) //*p节点没有右子树的情况
{
q = p; p = p->lchild;delete q;
}
else if (p->lchild == NULL) //*p节点没有左子树
{
q = p; p = p->rchild; delete q;
}
else Delete1(p, p->lchild);//*p节点既有左子树又有右子树的情况
}
void Delete1(BSTNode* p, BSTNode*& r)//被删节点:p,p的左子树节点:r
{
BSTNode* q;
if (r->rchild != NULL)
Delete1(p, r->rchild);//递归找最右下节点
else //找到了最右下节点*r
{ //将*r的关键字值赋给*p
p->key = r->key;
q = r; r = r->lchild; delete q;
}
}
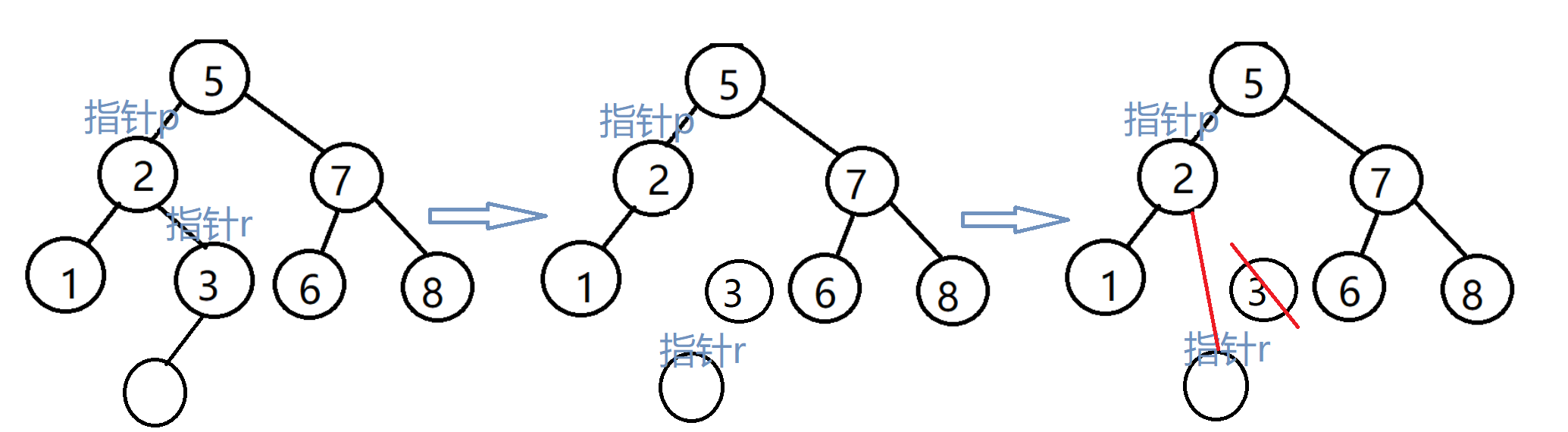
关于左右子树都有部分对两种写法进行比较
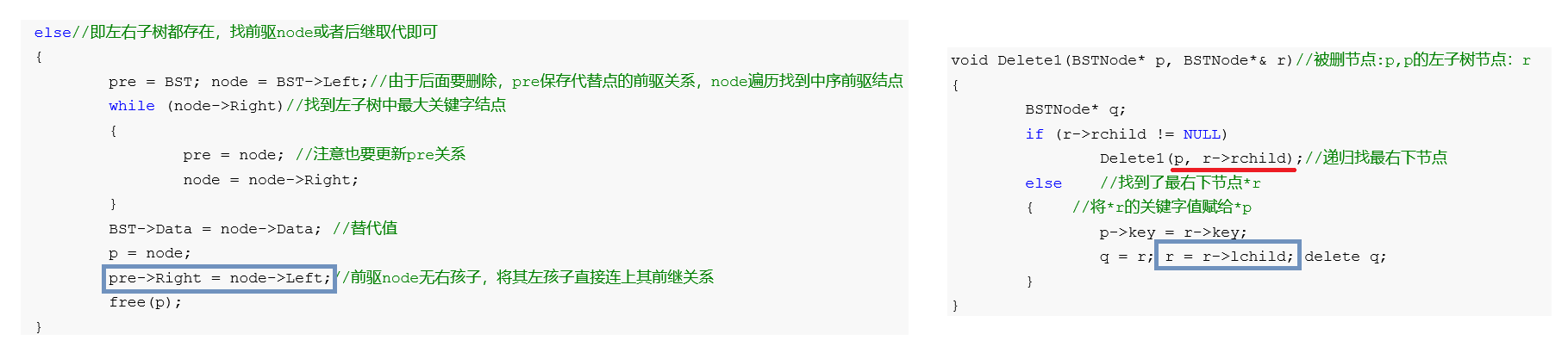
写法分析:
- 递归过程中之所以直接令 r = r->lchild,当递归返回上一层时:
此时为**最右结点左子树指针r**的与**原最右结点的父亲结点指针p**,由于递归自动就连接上了,作为指针p的右孩子连接上。
- 而在迭代写法过程中,删除最右结点r时,就像是**链表中的删除结点**一样:
必须保留要删除结点的前驱关系,先连接上,才能删除该结点。
**因此迭代写法中才多出指针pre来保存最右结点的前驱结点**
递归过程图示:
2.平衡二叉树
2.1定义
-
问题提出:在含有n个结点的二叉排序树查找操作执行时间与树形有关,最坏情况下就是单支树执行时间就为O(n),为了使最坏情况下的时间也是O(log2 n)。
因此有了平衡二叉树,就是在插入或删除结点时通过调整树的形态来保持树的平衡。 -
平衡二叉树有很多中,其中较为著名的是AVL树
-
若一棵二叉树中每个结点的左右自述的高度最多相差1,则称此二叉树为平衡二叉树
-
平衡因子:一个结点的平衡因子是该结点左子树的高度减去右子树的高度,即当平衡因子的绝对值小于等于1时,该结点平衡。
若一棵二叉树的所有结点都平衡,才为平衡二叉树
2.2平衡二叉树的插入
(此部分仅需掌握过程,无需具体掌握代码)
- 在插入调整过程中共分为四种情况:
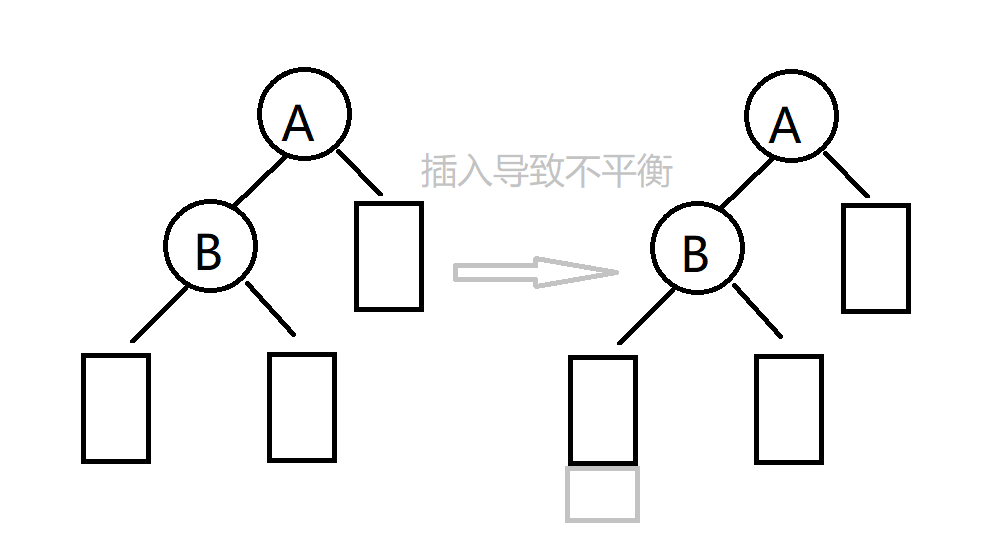
1):LL型调整 - 起因是在A结点左孩子(结点B)的左子树插入结点,使得A结点不平衡
![]()
- 调整方法是:将B结点向上代替A结点称为根结点,而A结点作为B结点的右孩子,同时B的右孩子作为A的左孩子
![]()
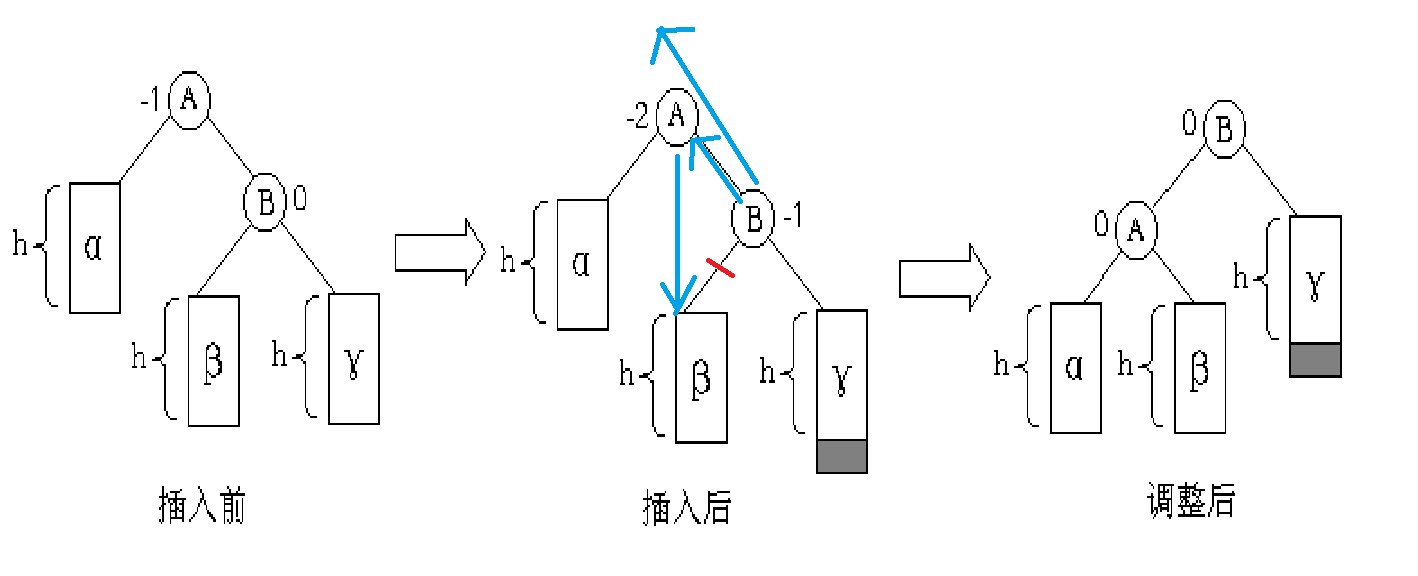
2):RR型调整(与LL型相对称)
- 起因是在A结点右孩子(结点B)的右子树插入结点,使得A结点不平衡
- 调整方法同样将B结点向上代替A作为根结点,但A结点作为B的左孩子,B的左孩子作为A的右孩子
![]()
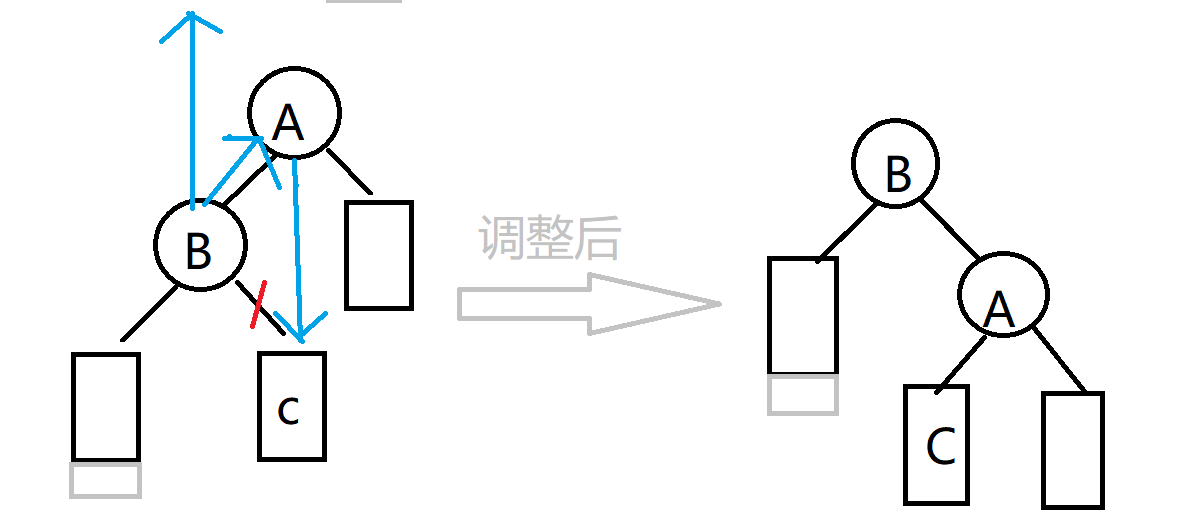
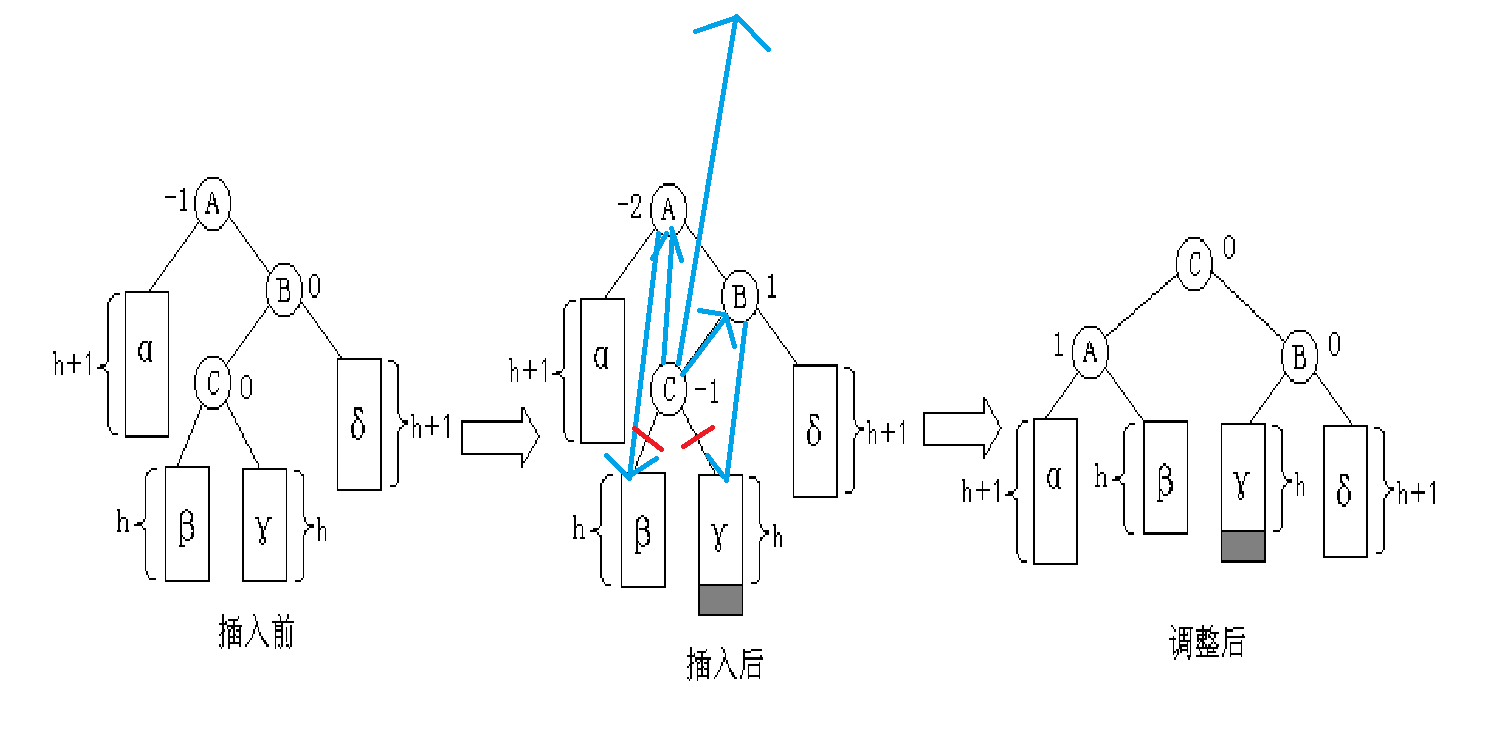
3):LR型调整
- 起因是在A结点左孩子(结点B)的右子树插入结点,使得A结点不平衡
- 调整方法将结点C上升作为根结点,B结点作为C的左孩子,A结点作为C的右孩子,C的结点的原左子树作为B结点的右子树,C结点的原右子树作为A结点的左子树
![]()
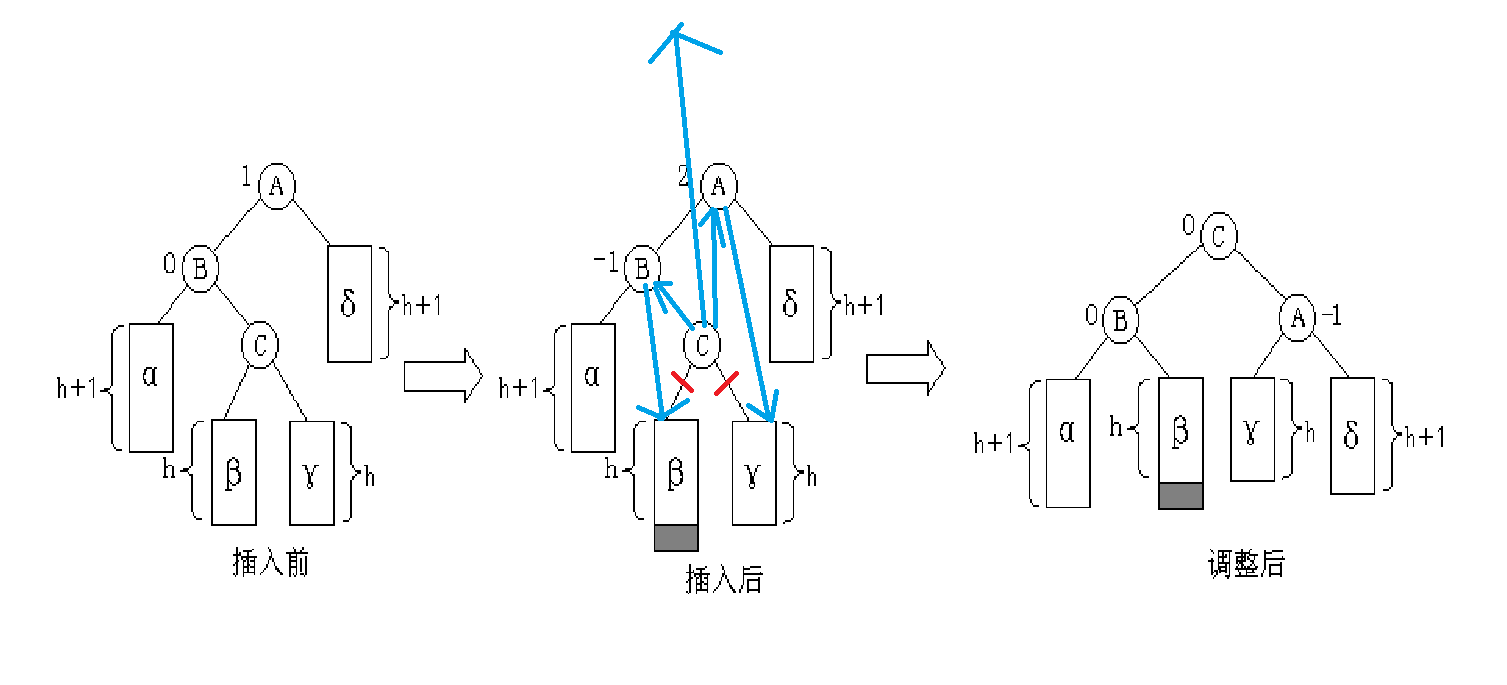
4):RL型调整(与LR型对称)
- 起因是在A结点右孩子(结点B)的左子树插入结点,使得A结点不平衡
- 调整方法将结点C上升作为根结点,A结点作为C的左孩子,B结点作为C的右孩子,C的结点的原左子树作为A结点的右子树,C结点的原右子树作为B结点的左子树
![]()
调整方法总结
找到失衡结点A后:
判断若为LL型,或者RR型,则将其**孩子结点B**往上提
若为LR型,或者RL型,则将其**孙子结点C**往上提
2.3平衡二叉树的删除
-
平衡二叉树中删除一个结点与二叉排序树中删除结点类似,只是增加了调整这一步骤
-
调整:若被删除的是结点q,则从结点q向根结点方向查找第一个失去平衡的点。
(具体调整类型同上)
3.B-树和B+树
基本概念等:
- BST和AVL树都是内存中,适用小数据量。每个节点放一个关键字,树的高度比较大。
B-树和B+树:一个节点可放多个关键字,降低树的高度。可放外存,适合大数据量查找。如数据库中数据。
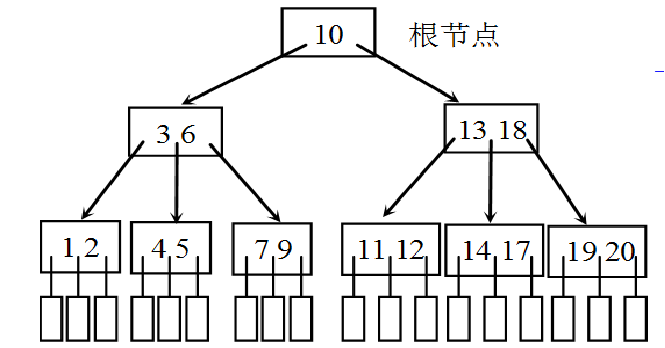
- 定义:一棵m阶B-树或者是一棵空树,或者是满足下列要求的m叉树:
每个节点至多m个孩子节点(至多有m - 1个关键字)
除根节点外,其他节点至少有m / 2个孩子节点(即至少有m / 2 - 1个关键字);
若根节点不是叶子节点,根节点至少两个孩子节点
- 每个结点n为关键字个数,n+1孩子指针。(因为分成n+1个区域,每个指针分别指向这n+1个区域)
![]()
B_结构体类型
#define MAXM 10 //定义B-树的最大的阶数
typedef int KeyType; //KeyType为关键字类型
typedef struct node //B-树节点类型定义
{
int keynum; //节点当前拥有的关键字的个数
KeyType key[MAXM]; //[1..keynum]存放关键字,[0]不用
struct node* parent; //双亲节点指针
struct node* ptr[MAXM];//孩子节点指针数组[0..keynum]
} BTNode;
B-树的查找
- 和二叉树的查找思路差不多,只是分情况不同
将k与根节点中的key[i]进行比较:
(1)若k = key[i],则查找成功;
(2)若k<key[1]
则沿着指针ptr[0]所指的子树继续查找;
(3)若key[i]<k<key[i + 1]
则沿着指针ptr[i]所指的子树继续查找;
(4)若k>key[n]?
则沿着指针ptr[n]所指的子树继续查找。
B_树的插入
- 关键字插入的位置必定在叶子结点层,有下列几种情况:
该结点的关键字个数 n < m - 1,插入后关键字数也是<=m-1不修改指针;
该结点的关键字个数 n = m - 1,则插入后关键字数就大于m-1,因此需进行“结点分裂”
分裂过程:
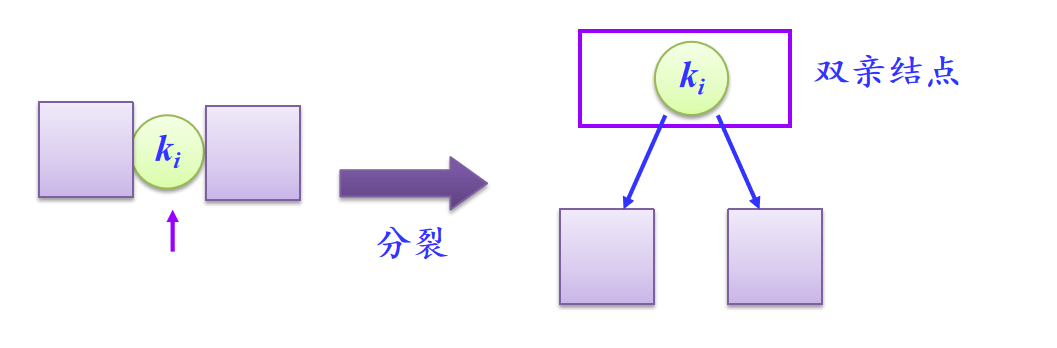
分裂时:
1.如果没有双亲结点,新建一个双亲结点,树的高度增加一层。
2.如果有双亲结点,将k插入到双亲结点中。
(注意若插入到双亲中后,双亲中关键字也变为>m-1,则需继续分裂,以此类推)
下面以一棵3阶B_树的插入过程为例:
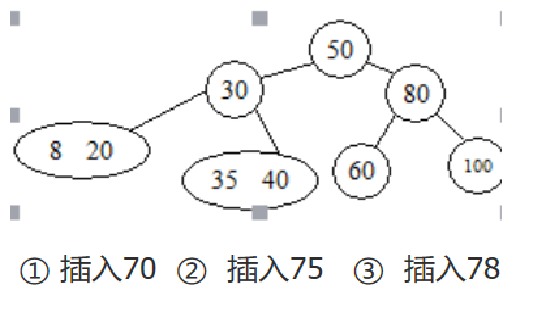
插入图示:

B_树的删除
- B_树的删除分为叶子结点和非叶子结点的删除
叶子结点的删除又分为三种:
1)结点中关键字的个数 > m / 2 - 1, 直接删除
2)结点中关键字的个数 = m / 2 - 1,要从其左(或右)兄弟结点“借调”关键字
1.兄弟结点最小关键字上移双亲结点
2.双亲结点大于删除关键字的关键字下移删除结点
- 如删除叶子结点中关键字15,min=2:
删除15后,双亲结点17下移到原关键字15的位置,兄弟结点18上移到原双亲结点17的位置
![]()

3)若其左和右兄弟结点均无关键字可借(结点中只有最少量的关键字),则必须进行结点的“合并”。
1.删除关键字
2.兄弟节点及删除关键字节点、双亲结点中分割二者关键字合并一个新叶子结点
3.若双亲结点关键字个数<=Min,重复2
- 如删除叶子结点中关键字15,min=2:
![]()
- 该例中,删除后,双亲中关键字小于min,则应继续2操作(合并)

非叶子结点的删除
在非叶子结点上删除关键字k
1.从子树节点借调最大或最小关键字key代替k,并pi子树中删除key。
若子树节点关键字个数也 < m / 2 - 1,则重复上述步骤
(若删除关键字为叶子结点层,按叶子结点删除操作法)
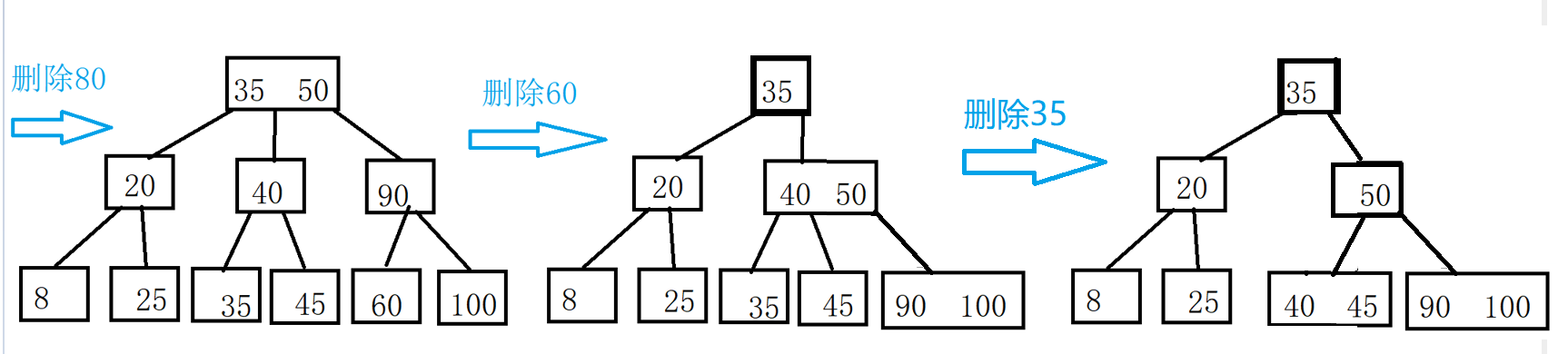
结合上述删除操作,下面以 MIN=1
对B-树做下面操作: 1.删除80 2.删除60 3.删除35
哈希表
-
哈希表(Hash Table)又称散列表,是除顺序表存储结构、链接表存储结构和索引表存储结构之外的又一种存储线性表的存储结构。
-
**注意:哈希表是一种存储结构,它并非适合任何情况,主要适合记录的关键字与存储地址存在 *某种函数关系 的数据。
-
对于哈希地址相同的要插入哈希表中的两个元素我们称为哈希冲突(同义词冲突)
-
注意设计哈希表时:哈希表长度与装填因子有关。
哈希函数构造方法
1. 直接定址法
直接定址法是以关键字k本身或关键字加上某个数值常量c作为哈希地址的方法。
优点:计算简单, 并且不可能有冲突发生
缺点:关键字分布不连续将造成内存单元的大量浪费
2. 除留余数法
除留余数法是用关键字k除以某个不大于哈希表长度m的数p所得的余数作为哈希地址的方法。
**p最好是质数(素数)。减少哈希冲突**
哈希冲突解决方法 (开放定址法)
(1)线性探查法
线性探查法的数学递推描述公式为:
d0 = h(k)
di = (di - 1 + 1) mod m(1≤i≤m - 1)
(2)平方探查法
平方探查法的数学描述公式为:
d0=h(k)
di=(d0± i2) mod m (1≤i≤m-1)
(平方探查法是一种较好的处理冲突的方法,可以避免出现堆积现象。它的缺点是不能探查到哈希表上的所有单元,但至少能探查到一半单元。)
哈希表上的运算
结构体
#define MaxSize 100
#define NULLKEY -1
#define DELKEY -2//已删除标志
typedef char * InfoType ;
typedef struct{
int key;// 关键字域
InfoType data;//其他数据域
int count; //探查次数
}HashTable[MaxSize];
具体操作代码
哈希表插入以及创建哈希表
void InsertHT(HashTable ha, int& n, KeyType k, int p)//哈希表插入数据
{
int address,Count=1;
address = k % p;
while (ha[address].key != NULLKEY&&ha[address].key!=DELKEY)//当有过删除操作时,需要注意&&后的判断条件
{
address = (address + 1) % p;
Count++;
}
ha[address].key = k; ha[address].count = Count;
}
void CreateHT(HashTable ha, KeyType x[], int n, int m, int p) //创建哈希表
{
int k;//要插入的关键字
for (int i = 0; i < m; i++)//创建哈希表,表长为m
{
ha[i].key = NULLKEY;
ha[i].count = 0;//初始化探测次数都为0
}
for (int i = 0; i < n; i++)//将n个数据插入哈希表
{
k = x[i];
InsertHT(ha, n, k, p);
}
}
哈希表查找
int SearchHT(HashTable ha, int p, KeyType k) //在哈希表中查找关键字k
{
int address,i=1;//计算探测次数
address = k % p;//初次计算地址
uns_count++;//表示查找失败次数
while (ha[address].key != k && ha[address].key != NULLKEY)
{
if (i >= p) break;
address = (address + 1) % p;//注意此处应是在表中探测查找所以%m,而该题m==p
uns_count++; i++;
}
if (ha[address].key == k)return address;//查找失败
else return -1;
}
哈希表删除
int DeleteHT(HashTable ha,int p,int k,int &n)
{ int adr;
adr=SearchHT(ha,p,k);
if(adr!=-1){
ha[adr].key=DELKEY;//逻辑删除,该元素贴删除标记
n--;
return 1; }
else return 0;
哈希链的相关操作
哈希链即采用拉链法解决冲突的哈希表。
结构体定义
typedef struct HashNode{
int key;
struct HashNode *next;
}HashNode,* HashTable;
HashTable ht[MAX];
注意学习堆区建哈希链的方法
struct Node//链表的结构体
{
ElementType Element;
struct ListNode *Next;
} ListNode, *List;
typedef struct
{
int TableSize;//哈希表的大小,即哈希表中链表的个数
List Lists;//链表指针数组,数组的每个元素为一个链表指针
}HashTable ;
HashTable *H;
H=new HashTable ;
H->Lists=new List[H->TableSize];
H->Lists[i]=new ListNode;
- 哈希链插入和删除操作,与链表的插入删除类似。
1.2.谈谈你对查找的认识及学习体会。
-
学了查找这部分,学习过程中,对各种查找的算法分析进行了具体的学习,感觉对各个算法间的优劣认识有所提高。不同的算法有不同的特点,不同的适用范围,今后也要学着根据具体情况,对情况分析,选择适合的算法。
2.PTA题目介绍
2.1 7-1 是否完全二叉搜索树
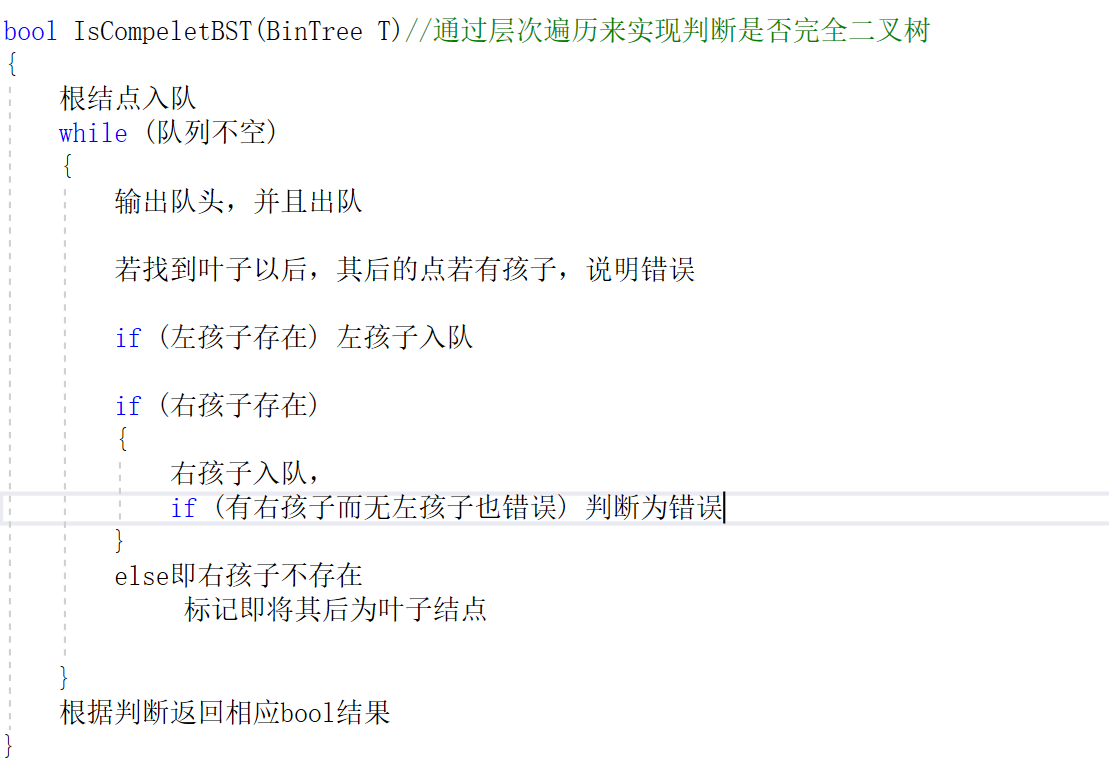
2.1.1 该题的设计思路
-
先通过序列将二叉排序树建起来,再进行判断。
通过层次遍历,根据完全二叉树的特点对其进行判断。
层次遍历时同时判断,层次遍历不间断输出结点,最后函数返回判断结果 -
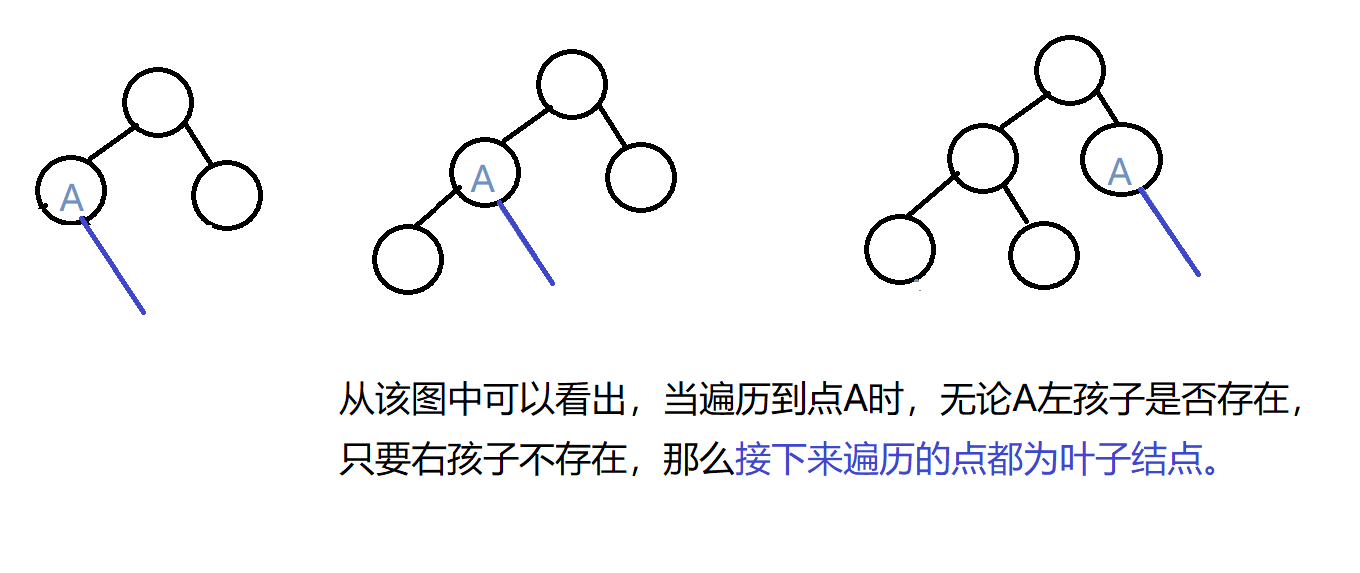
层次遍历时完全二叉树的 一个特点:即当遍历到某个顶点时,无论左孩子是否存在,只要右孩子不存在就说明,
接下来遍历的是接下来遍历的点一定都是都是叶子结点(则遍历这些结点是是不可能有孩子的)
!![]()
-
以该特点作为判断,一旦开始发现叶子结点,此后在遍历叶子结点过程中,若有孩子则一定不为完全二叉树。
-
总的框架还是在层次遍历的基础上完成,因为这是完全二叉树在层次遍历时的特点
-
该算法遍历一次序列创建树,又层次遍历一次树输出并判断,因此时间复杂度为O(n)
2.1.2 该题的伪代码
2.1.3 PTA提交列表

-
之前花的时间主要是在思考如何判断是否完全二叉树的误区,一开始没什么思路。
之前甚至调用高度函数,但是其中要考虑的东西太多了没法实现。一开始还有就是思考控制层的输出,就是已知层中元素个数,认真思考仍有些例子无法解决。
后来看题目是层次遍历输出,就想着说不定能通过层次遍历过程中康康如何实现。于是才对此深究起来。 -
代码上的错误基本上都在调试时修改,后面提交的错误就是格式错误控制输出的问题:输出之间空格,末尾无空格
![]()
在while(队列不空)循环中加上该语句,并且要在最后。
当所有元素都出队,并且无孩子再进队了,则说明无节点要遍历了,说明是结束了,其余情况都输出空格

2.1.4 本题设计的知识点
-
1.本题回顾了完全二叉树,根据树的特点以及自己对题目的思考,归纳了一个完全二叉树在层次遍历时的特点借此来判断是否完全二叉树的:
当遍历到某个顶点时,无论左孩子是否存在,只要右孩子不存在就说明,接下来遍历的是接下来遍历的点一定都是都是叶子结点(即接下来遍历的点左右孩子一定都是不存在的) -
2.对树的层次遍历又进行了复习,该题判断是否完全二叉树的思路代码,也是在层次遍历的代码上进行改造,进一步加深树层次遍历利用队列的代码写法。
-
3.关于二叉排序树的建立,先是创建空树,再根据序列,不断的调用插入函数,将序列中关键字一个个插入树中。
2.2 7-2 二叉搜索树的最近公共祖先

2.2.1该题的设计思路
-
首先本题给的先序序列,由于先序序列是根左右,重要的是根结点先遍历,因此我们仍然按照原有的插入结点方式建树即可
-
先调用常规查找函数,分别查找两个数是否在树中,判断是否特殊情况
-
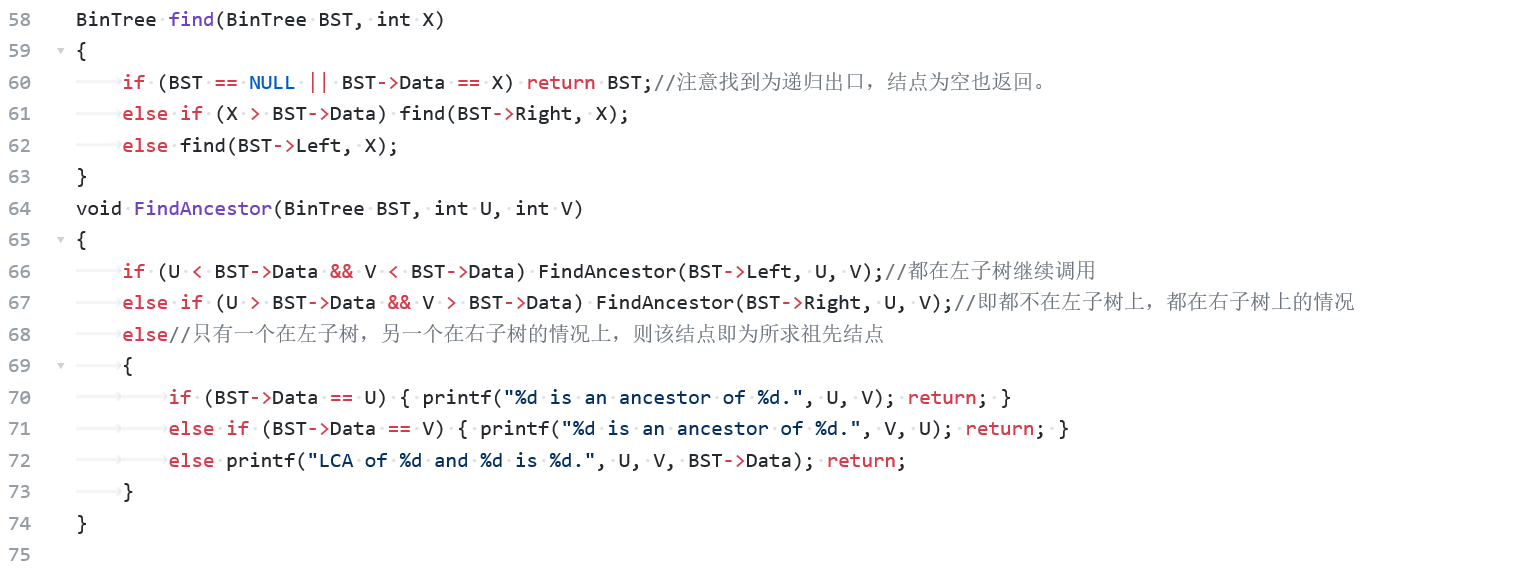
难点在于判断祖先:递归判断结点
若要查找的两个结点分别在左右树,则该点就为他们的祖先
若都在左子树或都在右子树,说明还有离这两个点更近的祖先结点,则进一步递归查找。
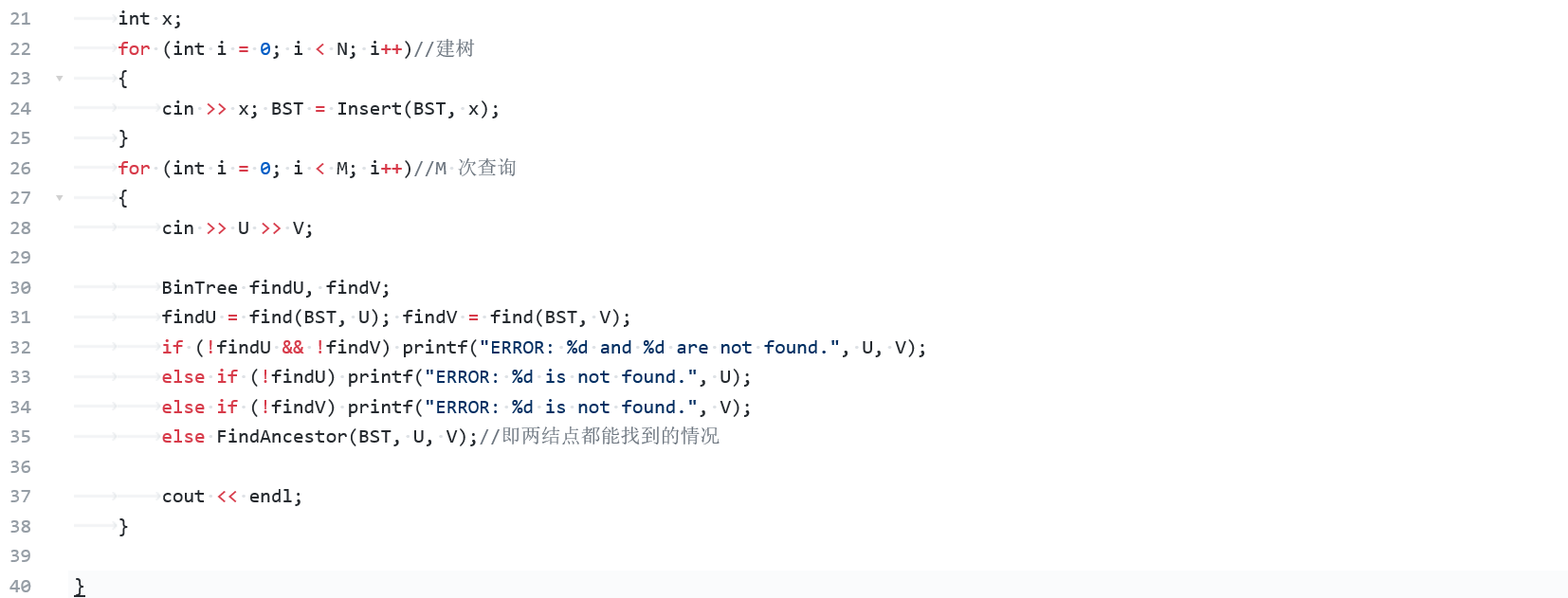
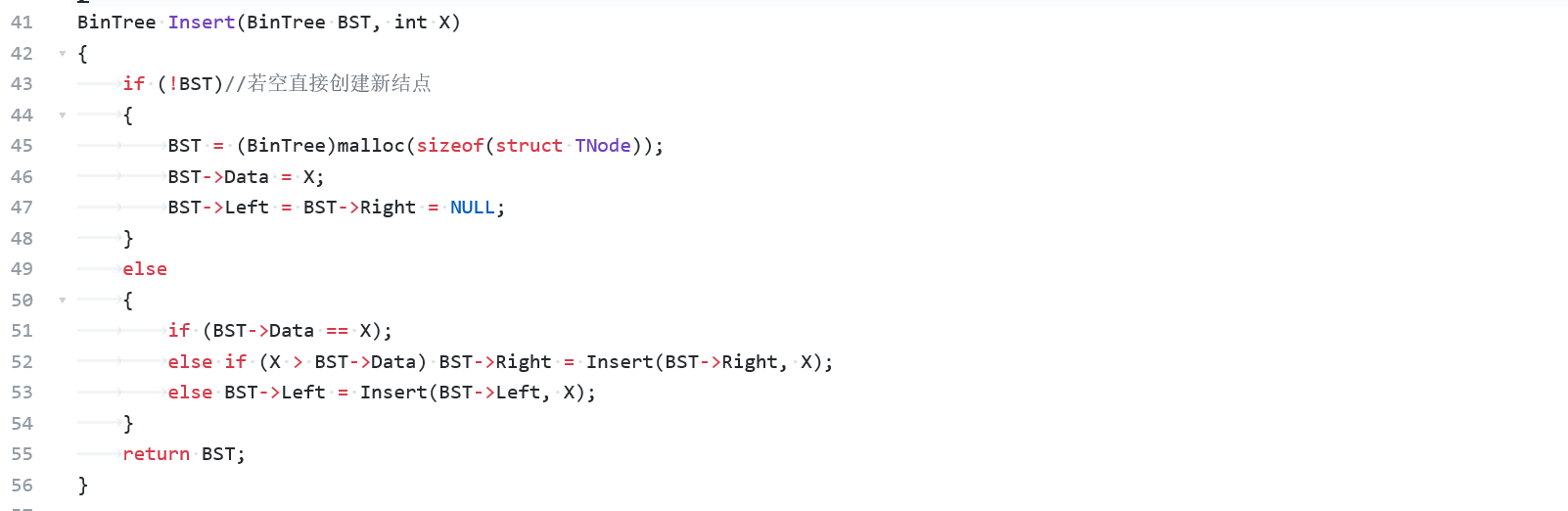
2.2.2该题的伪代码

- 主函数中先对两数的查找情况进行判断后,若都存在,则调用该寻找祖先函数
2.2.3PTA提交列表

-
部分正确的是又两个测试点超时错误。
-
上课听了老师的讲解,关于调用函数的花费时间。因此判断只有在一开始查找两数是否都在树中时才需要调用,其后递归判断两树在左或在右,则直接根据二叉排序的特性,与其值比较即可
-
还有一些需要调用函数的条件判断句,就修改成用变量保存调用函数的结果,尽量减少调用次数,来节约时间
2.2.4本题设计的知识点
-
对于给定排序树的先序序列,我们判断出由于其顺序特殊性,可以直接按照原插入方式进行插入,联系了二叉排序树的插入和建立
-
再次使用回顾了二叉排序树的查找,来先判断具体题目的特殊情况
-
对二叉排序树的结构有了更深的理解,关于祖先结点。查找两个数的祖先结点的结构特点,结构关系,并且利用递归函数来写。
2.3 7-5(哈希链) 航空公司VIP客户查询




2.3.1该题的设计思路
-
利用哈希链表来存储这些会员信息
-
利用ID来设计哈希地址:
若是ID中部分相同的则可能得到哈希地址相同的情况,这时我们同样通过ID来判断是否同个会员。同哈希地址的不同会员就插入该链
(注意:我们虽然是将每条会员记录都创建一个新的结点,但若是相同用户,并不是插入,而是将其他数据项(飞行里程)叠加,只要不同会员才插入) -
如图所示,同一个会员只有在表中一个结点,同哈希地址链中的结点ID一定不同
![]()
-
该题的输入输出用scanf,printf.

2.3.2该题的伪代码
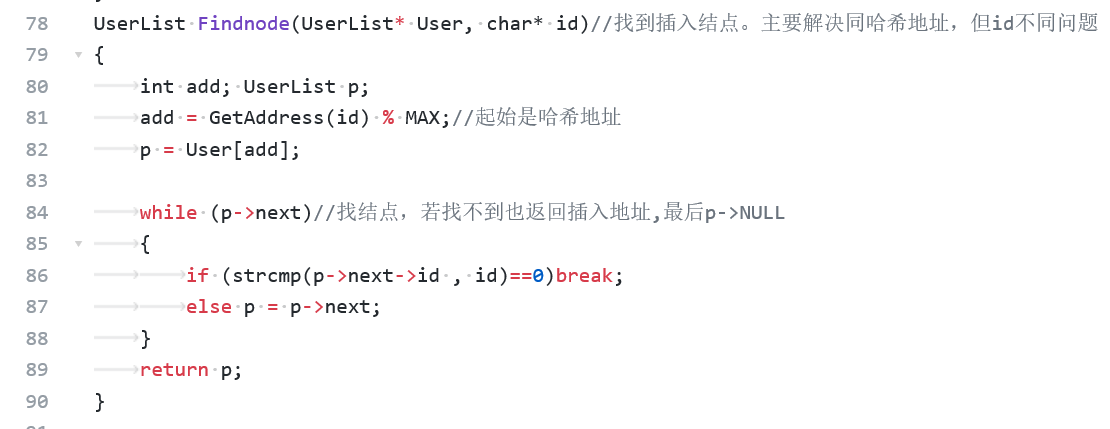
本题多个函数套用,大多为哈希链的基本操作函数,这里主要介绍一个查找插入位置的函数
UserList Findnode(UserList* User, char* id)//找到插入结点。主要解决同哈希地址,但id不同问题
{
调用获取哈希地址GetAddress(id) ;//起始是哈希地址
p取链头 ;
while (p->next)//找结点,若找不到也返回插入地址,最后p->NULL
{
if找到 break;
else p = p->next;
}
return p;
}
- 这是个将查找和插入位置结合起来的函数,若找不到则遍历完后p->next=NULL,只要在其他函数中对此进行判断就能知道是找不到。而若找得到,循环直接结束返回地址,则找到到,需要进行叠加里程的结点即为p->next结点
2.3.3PTA提交列表

-
之前一直超时过不了,后来将输入输出改成了scanf printf,提交才通过
-
关于查找判断是否存在的条件不够清晰,实际上就是根据哈希地址,在该链中遍历查找是否存在,若是一直遍历到空则说明查找不到。
想要达成查找同时返回插入结点,因此利用前驱指针遍历pre,返回插入位置后,根据指针pre->是否为空,就可判断是否找到了,若未找到也可直接插入到pre后面
2.3.4本题设计的知识点
-
主要就是关于哈希链的知识解题
如何根据具体题目设计计算哈希地:该题就是去ID中的几位数进行计算如何创建哈希链:计算出哈希地址后,往该链查找,若不存在则插入,根据此题情景,若已存在则累计
如何利用哈希链解决冲突问题:哈希地址冲突,但ID不可能完全相同,我们就插在该链中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号