Lloyd’s 算法 和 K-Means算法
在讲Lloyd’s 算法之前先介绍Voronoi图
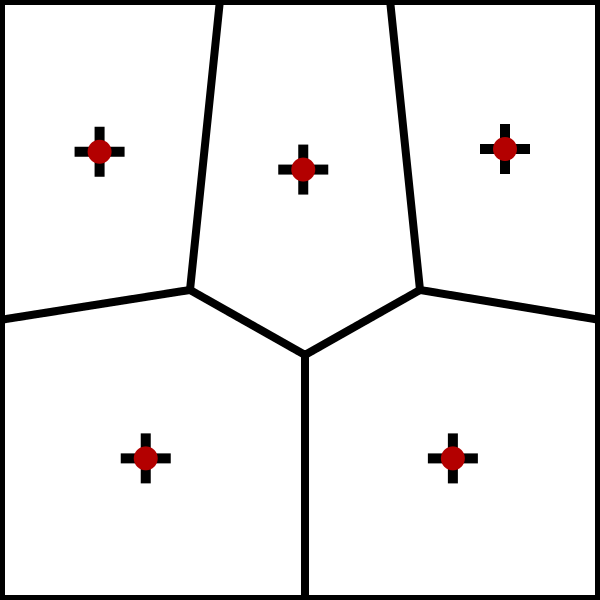
在数学中,Voronoi图是基于到平面的特定子集中的点的距离将平面划分成区域。预先指定一组点(称为种子,站点或生成器),并且对于每个种子,存在相应的区域,该区域由更接近该种子的所有点组成,而不是任何其他点。这些区域称为Voronoi细胞。
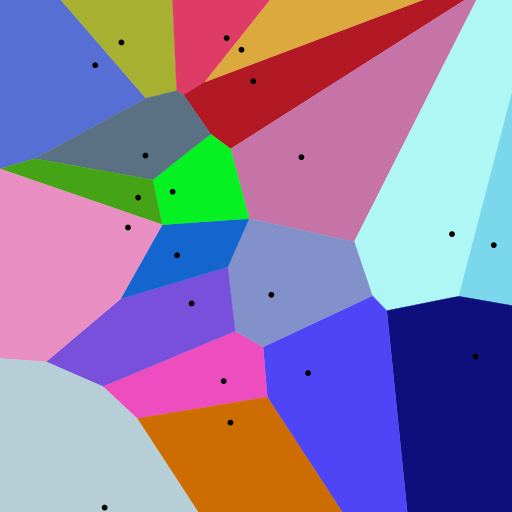
在最简单的情况下,如图所示,我们在欧几里德平面上给出了一组有限的点{p1,...,pn}。在这种情况下每个站点pk只是一个点,其相应的Voronoi单元Rk由欧几里德平面中的每个点组成,其与pk的距离小于或等于其与任何其他pk的距离。每个这样的单元是从半空间的交点获得的,因此它是凸多边形。 Voronoi图的边界是平面中与两个最近的站点等距的所有点。 Voronoi顶点(节点)是与三个(或更多)站点等距的点。
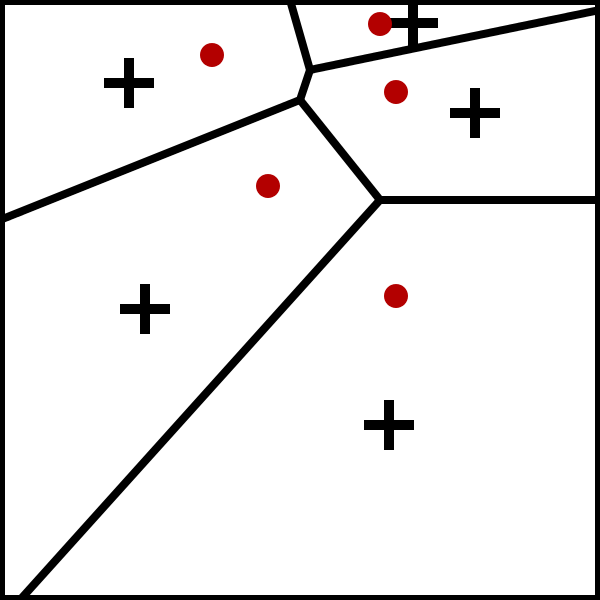
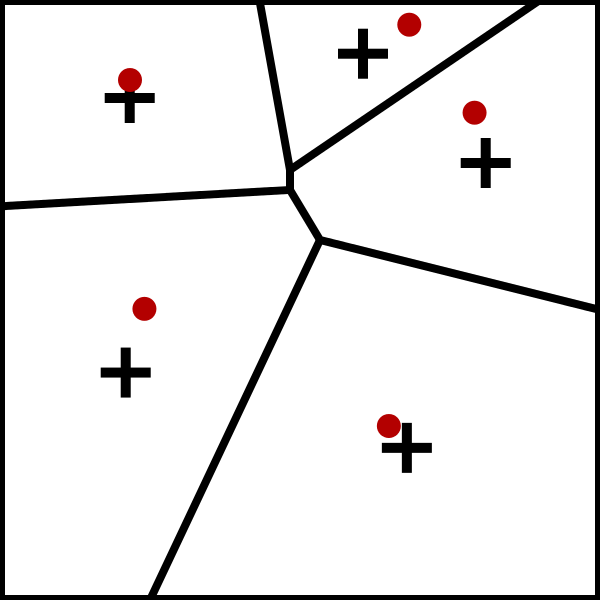
Lloyd’s algorithm 过程:
(1)首先在数据集中随机选定k个初始点
(2) 计算k个站点的Voronoi图。
(3)整合Voronoi图的每个单元格,并计算质心。
(4)然后将每个站点(k)移动到其Voronoi单元的质心。
如下图迭代过程
K-Means算法过程:
(1)随机初始化k个聚类中心的位置
(2)计算每一个点到聚类中心的距离,选取最小值分配给k(i)
(3)移动聚类中心(其实就是对所属它的样本点求平均值,就是它移动是位置)
(4)重复(2),(3)直到损失函数(也就是所有样本点到其所归属的样本中心的距离的和最小)
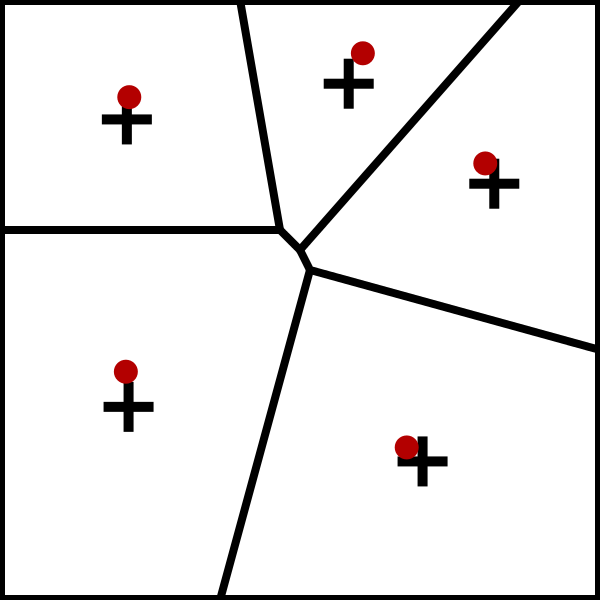
最后整体分类格局会变得稳定。
如下图
通过对比,可以发现这两个算法之间有许多相似之处,都是迭代的寻找聚族中心的位置。
然而,Lloyd’s算法与k均值聚类的不同之处在于,Lloyd’s的输入是一个连续的几何区域,而不是一组离散的点。
因此,当重新划分输入时,劳埃德算法使用Voronoi图而不是像k-means算法那样简单地确定每个有限点集的最近中心。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号