

深度强化学习入门-李宏毅
强化学习入门
方法分类
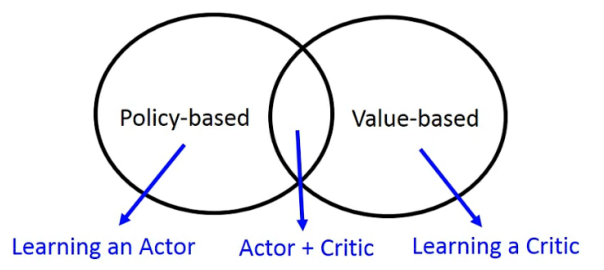
Policy-based(Acotr)
深度强化学习怎么做的(和普通监督学习类似):
1、Neural network as actor (定义模型)
2、goodness of function (定义目标函数)
3、pick the best function (选出最优模型 / 训练模型)
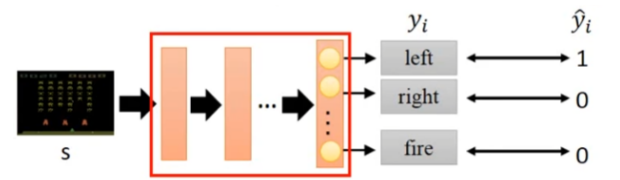
定义模型
$\theta $ 是神经网络参数
$\pi_{\theta} (s) $ 是智能体 Actor (注意,Actor具有随机性,即action根据概率得出的,所以每次游戏过程不一样)
\(R_{\theta} = \sum_{t=1}^{T} r_t\) 是所有奖励之和
\(\bar{R_{\theta}}\) 是所有 \(R_{\theta}\) 的期望 (因为每次游戏不一样,奖励也不一样)
$\tau = { s_1, a_1, r_1, s_2, a_2, r_2, ... } $ 是游戏轨迹 trajectory
\(P(\tau | \theta)\) 是trajectory发生的概率
\(\bar{R_{\theta}} = \mathop{\sum}\limits_{\tau} R(\tau) P(\tau | \theta)\) 其中,\(\tau\) 是多次游戏的采样
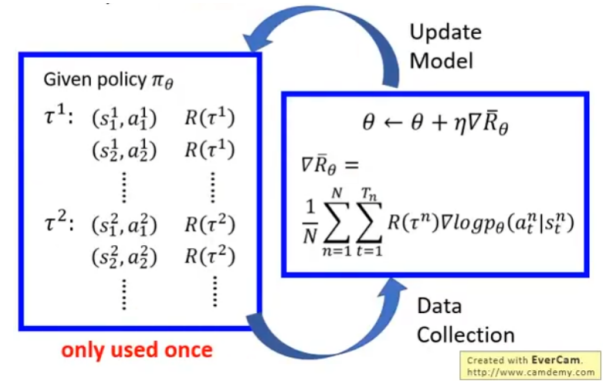
如何Gradient Ascent
1、有目标函数 \(\bar{R_{\theta}} = \mathop{\sum }\limits_{\tau} R(\tau) P(\tau | \theta)\)
2、求参数 \(\theta^{\star} = \mathop{\arg\max}\limits_{\theta} \bar{R_{\theta}}\)
3、梯度下降 \(\theta^{n+1} = \theta^{n} + \eta \nabla \bar{R_{\theta}}^{n}\)
4、
其中 $\nabla \bar{R_{\theta}} = \mathop{\sum}\limits_{\tau} R(\tau) \nabla P(\tau | \theta) = \mathop{\sum}\limits_{\tau} R(\tau) P(\tau | \theta) \frac{\nabla P(\tau | \theta)}{P(\tau | \theta)} \approx \frac{1}{n} \sum_{n=1}^{N} R(\tau) \nabla log P(\tau^n | \theta) $
其中 \(P(\tau | \theta) = p(s_1) \prod_{t=1}^{n} p(a_t | s_t, \theta)\)
把常数项去掉,得 $\nabla \bar{R_{\theta}} = \frac{1}{n} \sum_{n=1}^{N} \sum_{t=1}^{T_n} R(\tau^{n}) \nabla log p(a_t^n | s_t^n, \theta) $
其中,N是N次采样,T是一次完整的游戏序列
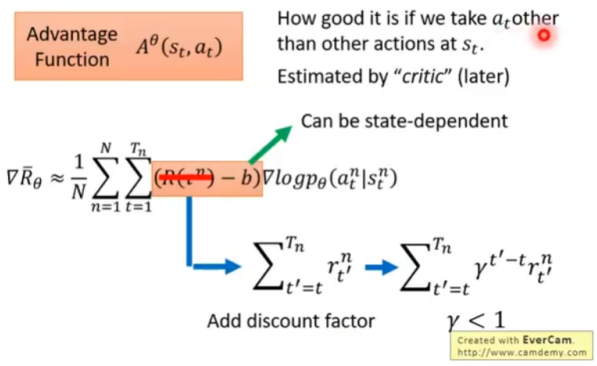
两个Tip
1、实际上,游戏的奖励函数大多是正数,而我们想要既有正数又有负数(梯度上升或梯度下降),所以需要在公式中加一个偏置项

2、\(R(\tau^n)\) 不应该是整个序列的累加奖励,有以下优化:
- 应该是从当前时刻的状态\(s_t\)算起,\(s_t\)之前的奖励不算
- 每个时刻的奖励权重不应该一样
- 这些奖励可以提前算出来,用\(A^{\theta}\)表示
Value-based(Critic)
什么是Critic?
1、Critic不用做出action
2、假如有一个Actor \(\pi\) , 如何评估Acotr的好坏?
3、用state value function状态价值函数 \(V^{\pi}(s)\) 评价当前状态的好坏。 \(V^{\pi}(s)\) 是当前状态开始的累加奖励的期望。深度学习中,\(V^{\pi}(s)\) 就是一个神经网络。

如何计算V函数,有两种方法
方法一,Monte-Carlo:给定任意当前状态\(s_a\),一直到游戏结束,得到真实值 \(G_a\) ,用\(G_a\) 优化网络。
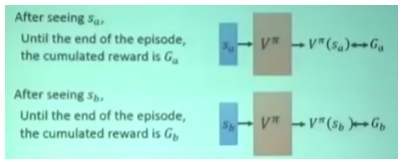
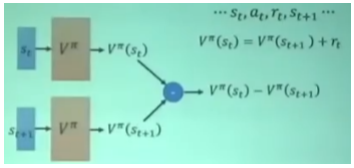
方法二,Temporal-difference:用两个相邻状态的价值函数之差 \(V^{\pi}(s_t) - V^{\pi}(s_{t+1}) \rightarrow r_t\) 逼近奖励,奖励\(r_t\)是真实值。
- 优点:不用完成整个游戏序列
- 缺点:损失小,收敛满
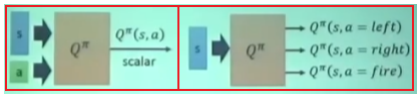
另一个Critic:计算动作
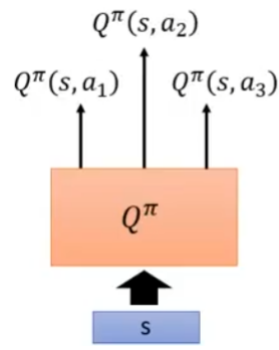
1、state-action value function \(Q^{\pi}(s,a)\) :通过状态s和动作a评估Actor好坏。

2、如果动作有限,可以通过Q函数计算出每个动作的分数。
Q-Learning
通过TD算法计算损失,把Q函数当成回归任务,不断更新参数。

算法:

Actor + Critic
Advantage Actor-Critic (A2C)方法:讲的不详细,后面有详细的,这里 略。
Asynchronous Advantage Actor-Critic-Agents (A3C)方法:用多个分身学习,然后汇总,更新...
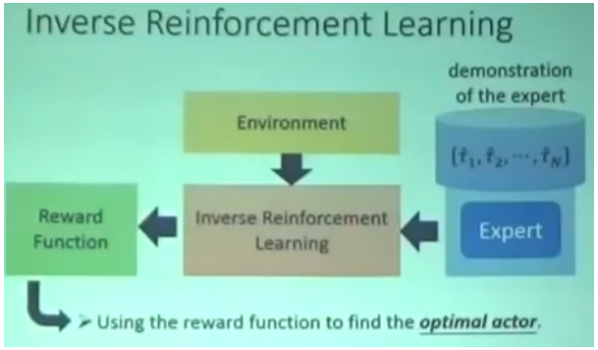
Inverse Reinforcement Learning
现实中Reward函数不知道,怎么解决?
1、专家Expert演示怎么玩
2、IRL反推出Reward函数
3、根据Reward函数就可以找到最优的actor
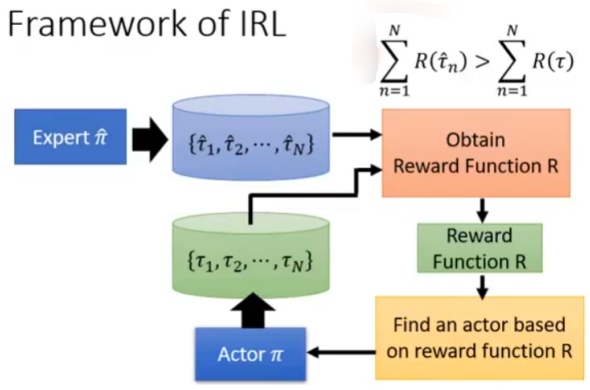
实现原理:
1、专家演示一系列游戏记录;
2、Actor随机初始化,也玩一系列游戏记录;
3、定义专家的Reward 一定要高于 Actor的Reward,得到一个Reward函数;
4、基于新的Reward,Actor再玩一系列游戏记录,不断优化Reward函数

PPO
Proximal Policy Optimization 是 OpenAI默认的强化学习算法
PPO算法的学习过程:

On-policy:智能体学习、交互的环境都是同一个。通过“自己玩”完成学习,如象棋对弈。
Off-policy:智能体学习、交互的环境不是同一个。通过“看别人玩”完成学习。
Policy Gradient
入门章节讲了,这里略。
On-policy to Off-policy
问题引入
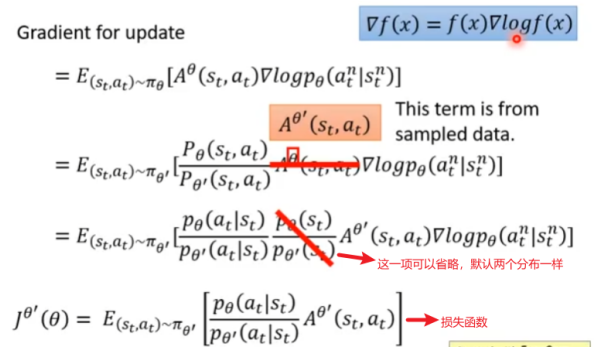
Policy-based方法的梯度这样计算:

问题:从\(\pi_{\theta}\) 中采样数据,当\(\theta\) 更新时,需要重新采样
解决:从另一个Acotr \(\pi_{\theta'}\) 中采样数据,\(\theta\) 更新时,对 \(\theta'\) 无影响,无需重新采样。

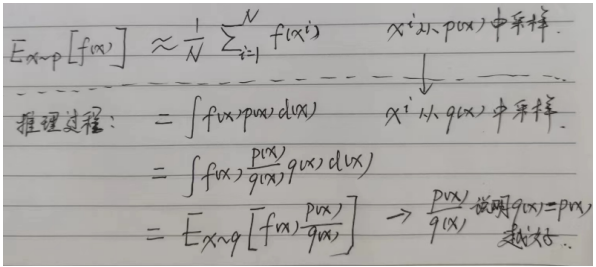
Importance Sampling (上面式子的推导过程)
重要性采样:
从梯度更新,推出损失函数
Add constraint
上面损失函数已经有了,但是还需要加入约束,保证\(\theta\) 和\(\theta'\) 不要差太多。
Proximal Policy Optimization (PPO):

笔记:这里的KL散度不是计算参数的距离,而是在计算action的距离。
PPO算法:
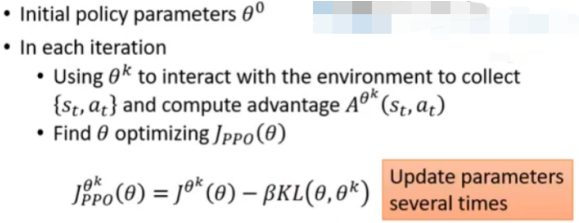
笔记:发现这里每轮也需要采样,但是特别指出,在每一步可以update多次。
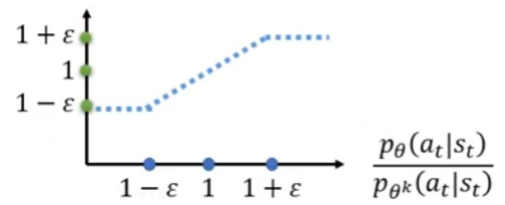
KL算法计算很复杂,因此提出了PPO2算法:
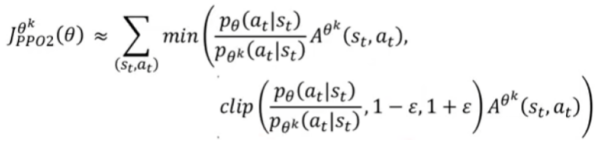
笔记:
1、clip函数约束第一个参数,介于第二个和第三个参数之间。蓝色线表示目标函数中第二项的取值。
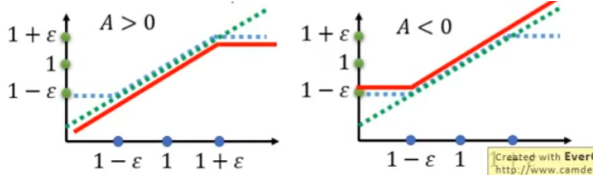
2、这个算是函数两种情况讨论,当A>0 或A<0时。如下图,绿色线表示第一项取值,蓝色线表示第二项取值,红色线表示最终损失函数的取值。
Q-Learning
Introduction of Q-Learning
入门章节讲了,这里略。
Tips of Q-Learning
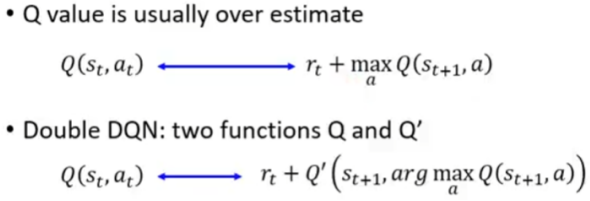
问题:Q-Learning训练时损失越来越小,但是Q函数越来越大,导致经常被高估。
Double DQN 解决方案:用两个Q函数
1、Q-Learning本身就需要两个网络,所以现在的计算量没有增加。
2、Q变大,并不影响\(Q'\) 值;\(Q'\) 变大,不影响Q选择的动作。
Dueling DQN 解决方案:修改网络架构。
将Q改成V+A,并对A做Normalization,控制Q不要变大。

Prioritized Reply 解决方案:优先采样TD error大的样本。
Q-Learning是从Buffer中采样,导致出现action多的采样概率高。这里优先采样TD error大的样本。

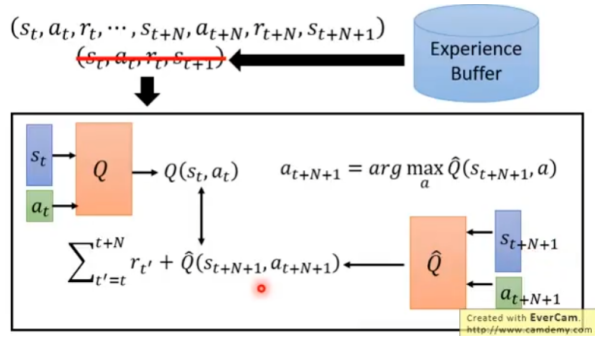
Multi-Step 解决方案:平衡TD和MC算法。
TD算法只需要一步,MC算法需要完整序列,这里用N步。
Noisy Net 解决方案:添加噪声。
第一种:在选择action时,用概率去选,而不是永远取最大action;
第二种:在每轮开始前,参数中注入噪声。
区别:第一种方式每次动作比较随机,第二种方式每次动作比较固定,实际效果是第二种方法好。

Distributional Q-funtion 解决方案:用多个Q函数。
Q是一个分布函数,一个可能不靠谱,用多个取平均或取最大。
Rainbow :将上面7个方法全部组合起来用,达到了最强!

Q-Learning for Continuous Actions
如何解决连续动作?
第一种:采样多个动作,离散代替连续;
第二种:使用梯度计算动作;
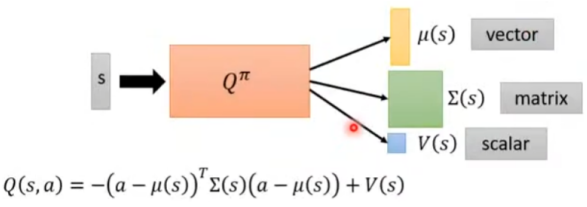
第三种:用神经网络,比较简单,如下图,其中动作action是一个向量。
Actor-Critic
Advantage Actor-Critic-Agents
1、G用Q代替,b用V代替,将Policy-based和Value-based结合起来。
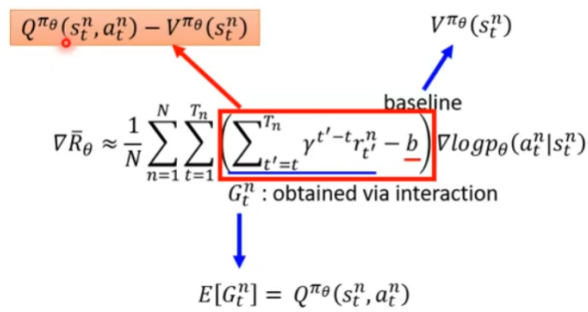
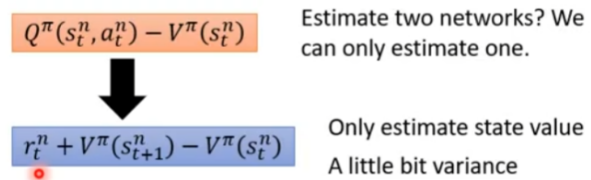
2、Q的值可以用V的值计算
3、算法流程图
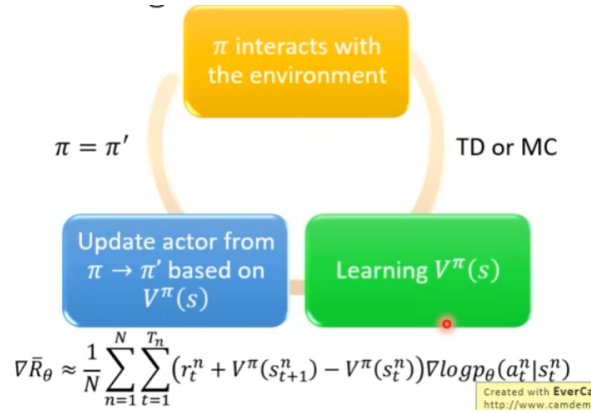
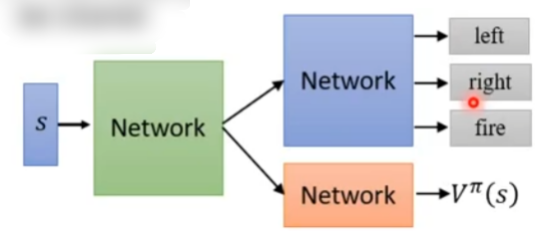
4、Tips:actor和critic可以共用一部分参数
Asynchronous Advantage Actor-Critic-Agents
原理:用多个“分身”去计算梯度,但是在梯度更新时在同一个网络上,这样加速了计算和最终效果。
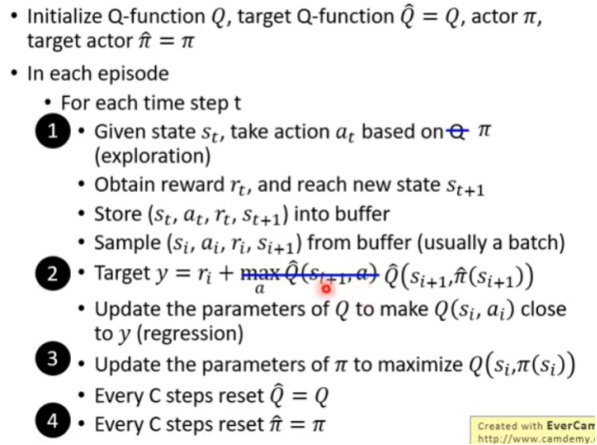
Pathwise Derivative Policy Gradient
一种基于Q-Learning改进的方法,其网络结构如下
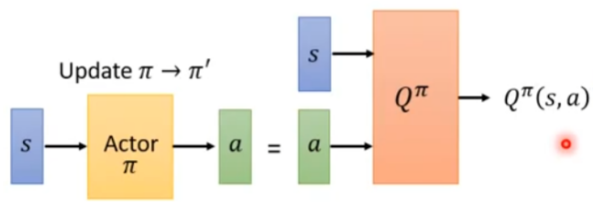
算法步骤如下(相比Q-Learning算法,只多了几步):
Sparse Reward
如果Reward非常稀疏,智能体可能什么也学不到,怎么解决这个问题呢?
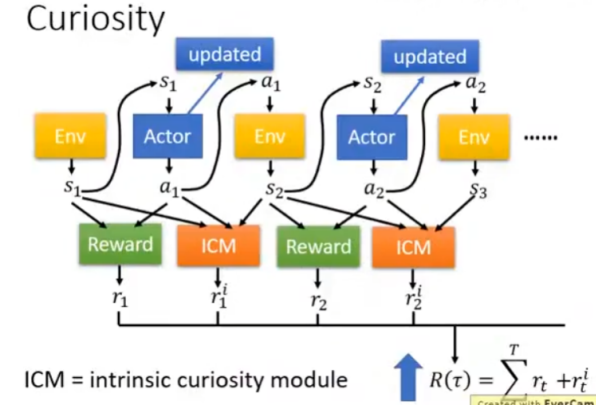
Reward Shaping
重新设计Reward,可以和真实Reward不完全相同。
如,ICM模型的Reward的设计:
1、鼓励Agent好奇心: \(\hat{s}_{t+1}\) 和 \(s_{t+1}\) 差距越大Reward 越高。
2、不能一味鼓励好奇心,还要过滤不重要状态(略,这里不讲了)
Curriculum Learning
规划学习课程,从简单到困难学习。
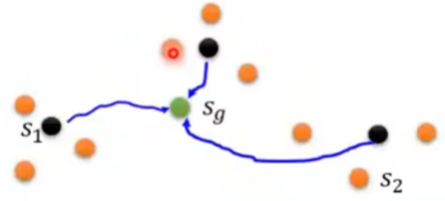
如,Reverse Curriculum Learning 逆向课程学习步骤如下:
1、给一个目标状态 \(s_g\)
2、根据\(s_g\)采样,并学习得到多条学习路径及Reward,删除极端路径;
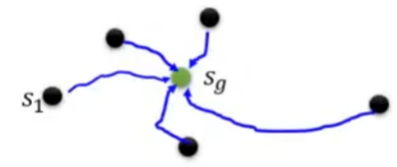
3、从第二步的采样中采样,学习路径及Reward,不断重复。
Imitation Learning
多数情况下,没有Reward。如果没有Reward,智能体怎么学习?
答案:需要有专家expert来演示demonstration
这里介绍两种:
1、Behavior Cloning
2、Inverse Reinforcement Learning (inverse optimal control)
Behavior Cloning
方法:用专家数据(s, a),训练网络。
问题:智能体对特殊情况无法处理。
解决:数据要多样性,智能体自己选择动作,但是Expert要指示出当前S正确的动作。
Inverse Reinforcement Learnin (IRL)
用expert数据反推reward;有了reward就可以训练智能体。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号