

论文-RF-UAVNet:用于射频无人机监控系统的高性能卷积网络
论文信息
论文题目:RF-UAVNet: High-Performance Convolutional Network for RF-Based Drone Surveillance Systems
RF-UAVNet: 用于射频无人机监控系统的高性能卷积网络
论文地址:https://ieeexplore.ieee.org/document/9768809
发表时间:2022.05.04
作者:Thien Huynh-The 地址在韩国
笔记:我只关注分类方法和原理,不关注DNN结构的优化,所以涉及到对DNN的优化就一笔带过。
Abstract
近年来,家用无人机存在“黑飞”问题。本文提出了高性能卷积网络,用来监控和分类无人机(UAV)。
所提出的RF-UAVNet网络采用分组一维卷积,显著降低了网络规模和计算成本。另外,还提出一种多级跳连接结构结构,提高分类精度。
在实验中,RF-UAVNet对无人机检测的准确率为99.85%,对无人机分类的准确率为98.53%,在操作模式识别(无人机操作指令识别)方面为95.33%,这些数字超过了DroneRF上当前最先进的基于深度学习的方法,DroneRF是基于射频的无人机监视系统的公开数据集。
一、Introduction
阐述基于RF监控和分类无人机的重要性。
回顾基于RF监控和分类无人机的方法:傅里叶变换、随机森林、DNN、RNN、CNN。论证DNN方法好。
我们提出了一种有效的无人机监视方法,该方法使用具有深度架构的监督学习来监视和管理已知的无人机。用于三个任务:无人机检测,无人机分类、操作模式识别。我们设计了具有多个卷积层的深度网络架构,...,来提高精度。我们在实用的DroneRF数据集上评估了RF-UAVNet的性能。将该方法与相同条件下的最新方法进行了比较,表明RF-UAVNet在三项任务上优于其他深度网络,并减少了参数量和计算量。
二、State-of-the-Art Techniques
A Radar-Based Technique
基于雷达的方法,略
B Audio-Based Technique
基于声纹的方法,略
C Video-Based Technique
基于视频的无人机检测
D RF-Based Technique
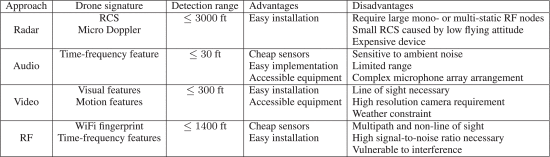
利用无人机与地面控制器之间截获的射频信号,提出了几种基于射频的无人机检测方法,具有全天候昼夜工作等不同场景的优势。在[35]中,基于射频信号RF的快速傅里叶变换FFT特征,三个深度神经网络(DNN)使用相同的架构,用于三个独立的任务:无人机检测,无人机分类和操作识别。
笔记:可以看出,这篇论文基于[35]的研究。
论文35:RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database
最后,作者用表格总结了上述四种方法的优缺点:
三、Methodology
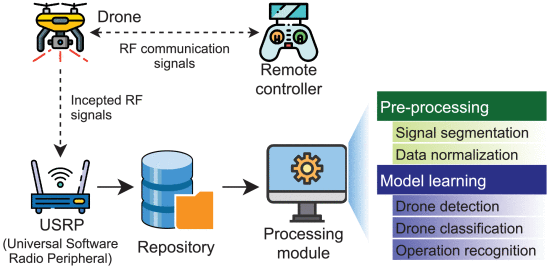
A System Model
系统模型:
- 遥控器和无人机通信;
- 通信信号被USRP捕获和存储;
- 计算机处理:预处理、分类。
B RF Database Description
数据集:用的别人公开的数据集 DroneRF,可用于无人机探测、无人机分类、操作模式分类(operation mode recognition)
该数据集收集自三个无人机:Parrot Bebop, Parrot AR Drone, and DJI Phantom 3
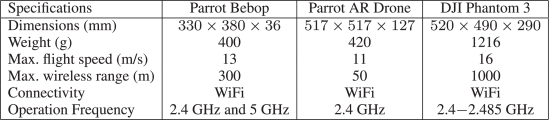
操作模式有四种,分别用01 02 03 04表示:
- 打开电源(连接到控制器)。
- 自动悬停(不需要物理和用户命令的干预)。
- 不录像飞行。
- 录像飞行。
还需要注意的是:
- Phantom 无人机只用了一种连接模式(其他模式的数据在收集过程中被损坏)。
- 还有一类数据,“没有无人机”的数据,用于识别无人机是否存在。
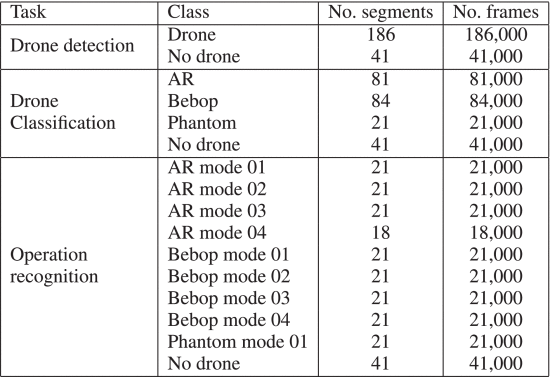
接收器是两个相同规格的USRP-2943,以收集采样率为40 MHz,增益为30 dB的频段的下部(L)和上部(H)半部分信号。该数据集有 227 个射频信号段( signal segments),其中每个段有两个幅度记录(L 和 H 波段)。原始数据集大小为227 x 2 x 1000万。将DroneRF中的RF数据使用非重叠窗口机制,分割成多个信号帧(signal frames),每个信号帧长度10000。因此,最后得到227000个信号帧,每个维度为1×10000×2 (每个帧长度10000,有L和H两部分)。
笔记:
- 数据用两个接收器(L和H)收集(DroneRF原始数据集),再将数据分成帧,然后数据归一化(缩放至[0-1]),形成用于模型训练的数据。
- 数据总数是227000,被用于三个目的(Task),因此有三次划分(Class)
C RF-UAVNet
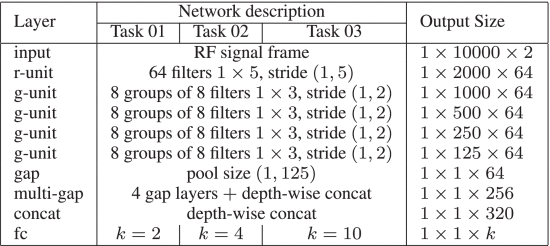
模型细节不说了,模型结构如下图。(Task 01: Drone Detection, Task 02: Drone Classification, and Task 03: Operation Recognition)
笔记:输入都是1x10000x2,输出分别为2 4 10,分别用于三个任务。
四、Experimental Results and Discussions
每个试验采用10折交叉验证。四次试验,分别用于:
- RF-UAVNet在这三个任务上的性能。
- g-conv层中不同滤波组数下RF-UAVNet对整体系统性能的参数敏感性。
- 将RF-UAVNet与其变体进行比较,以证明分组卷积和跳接结合多间隙的优势。
- 将RF-UAVNet与其他最先进的基于DL的方法进行了比较。
后面只介绍第一个和第四个试验。
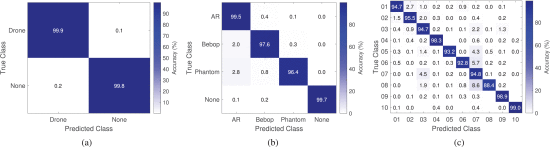
A Model Performance
笔记:Confusion matrices,用混淆矩阵评估性能
B Parameter Sensitivity
参数灵敏度,略。
C Ablation Study
消融研究,略。
D Method Comparison
和DNN [35], 1D-CNN [17], and MC-CNN [36]从以下几个方面比较:
- accuracy
- F1-score
- number of trainable parameters, FLOPs, processing speed

Conclusion and Discussions
创新点:模型
待改进点:收集自己的数据

 浙公网安备 33010602011771号
浙公网安备 33010602011771号