7_线性控制器设计(Linear Controller Design)
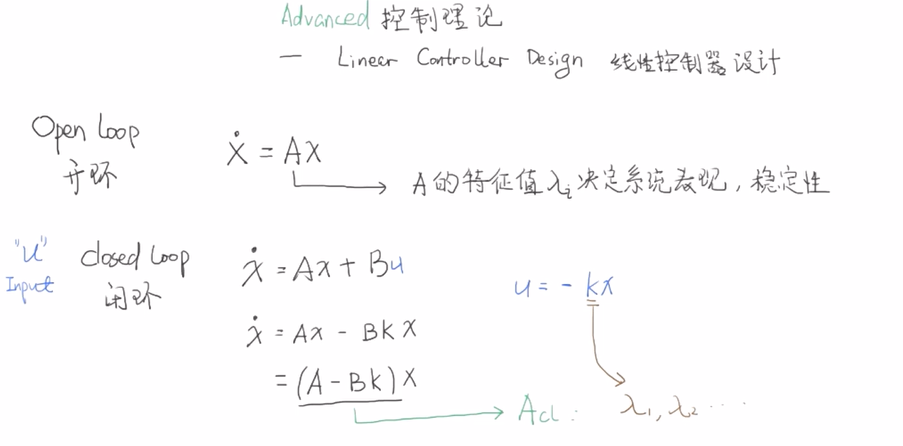
开环系统中
状态方程![]() ,其中A的特征值将决定这个系统的表现(稳定性或者收敛速度;特征值小于0时系统稳定)
,其中A的特征值将决定这个系统的表现(稳定性或者收敛速度;特征值小于0时系统稳定)
如果开环系统特征值大于0时(即系统不稳定时);
可以引入输入量U时(U是关于状态变量X的函数),则这个系统变成闭环系统,状态方程变成![]() ,
,![]() ;
;
则状态方程变成 ,这样就可以研究K的取值,让A-BK的特征值变成负数,来使系统稳定。
,这样就可以研究K的取值,让A-BK的特征值变成负数,来使系统稳定。
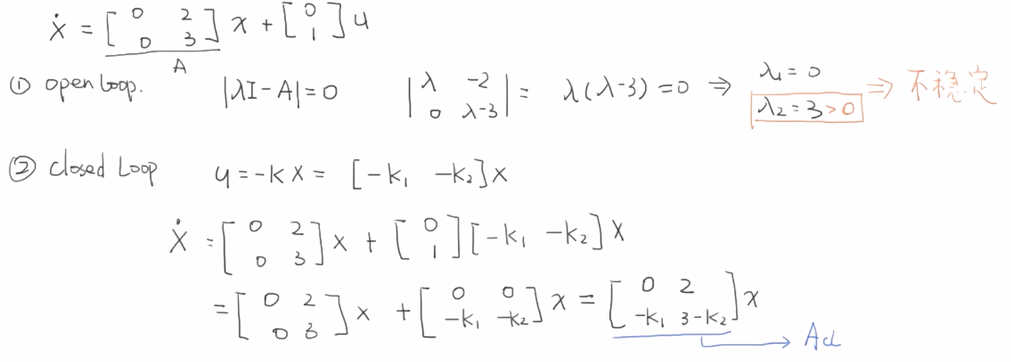
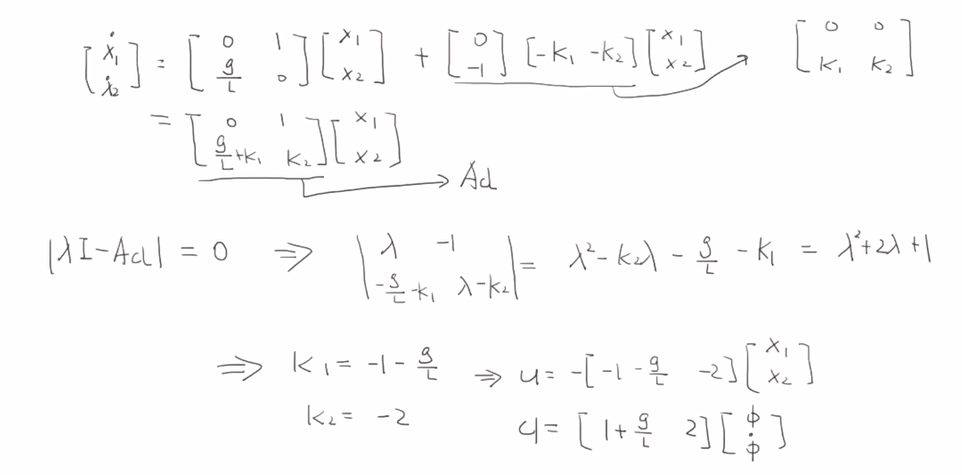
举例:

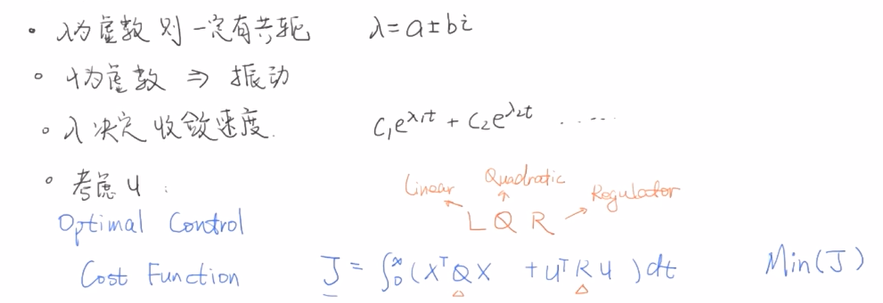
如何选取希望的λ,上面只是简单选取λ1、λ2为-1;
再看看下面例子是否也能通过U来稳定:
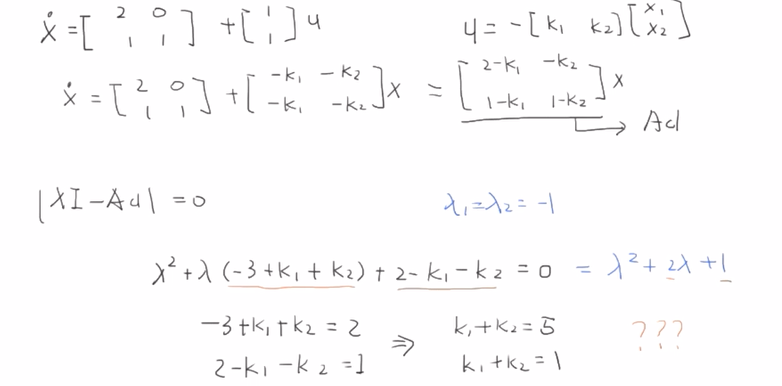
可以看出K1、K2没有解即不能通过U来使系统稳定。
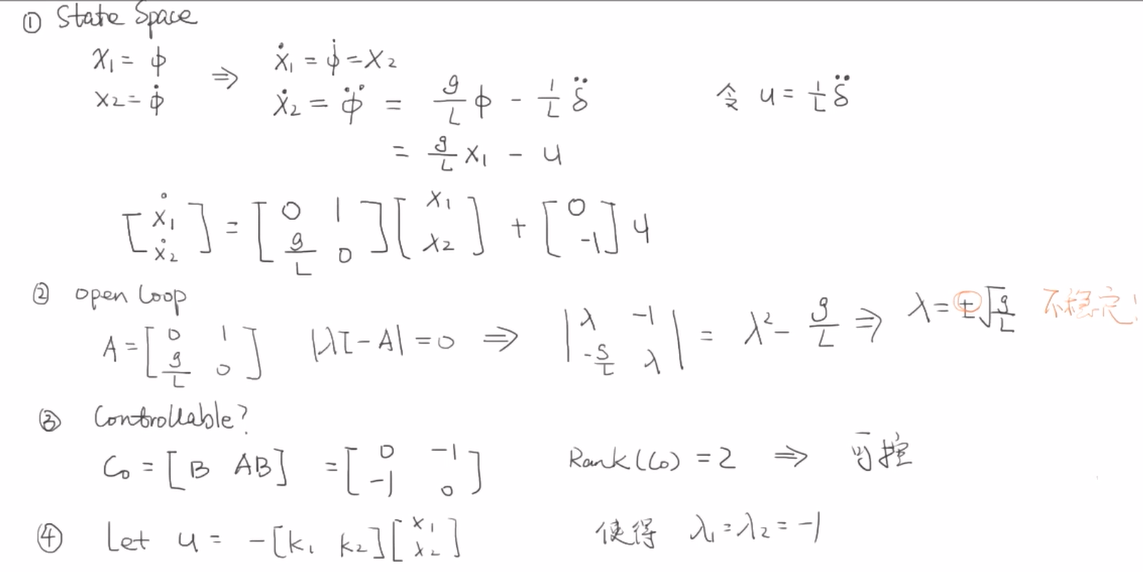
所以再此之前应该判断系统的可控性。
以一个实际的例子举例:用手指来平衡小球
初始图: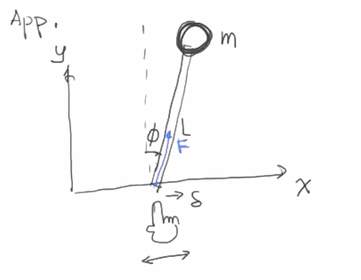 受力分析图:
受力分析图: 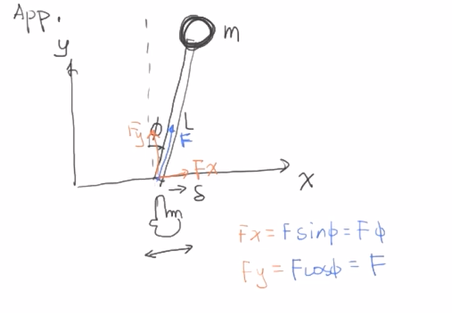
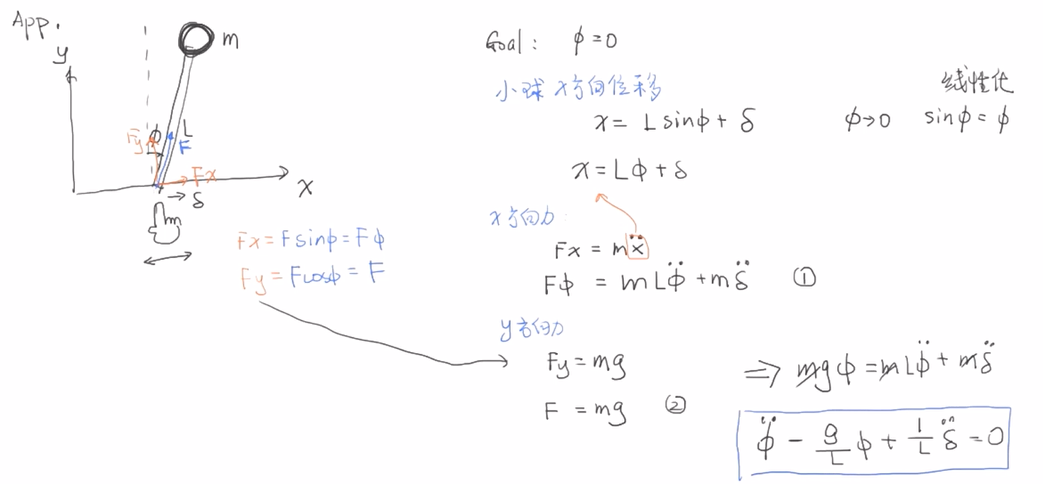
将微分方程写成状态方程:
我们向往远方,却忽略了此刻的美丽
