
【数值分析期末大作业/第四次大作业】
本博客提供的代码为在BUAA 2022秋季数值分析课提交的大作业基础上,寒假进行修改的产物。
10系人,提供的代码不一定完善/正确,欢迎提出意见/建议。
---------------------------------------------------------------------------------------------------------------------
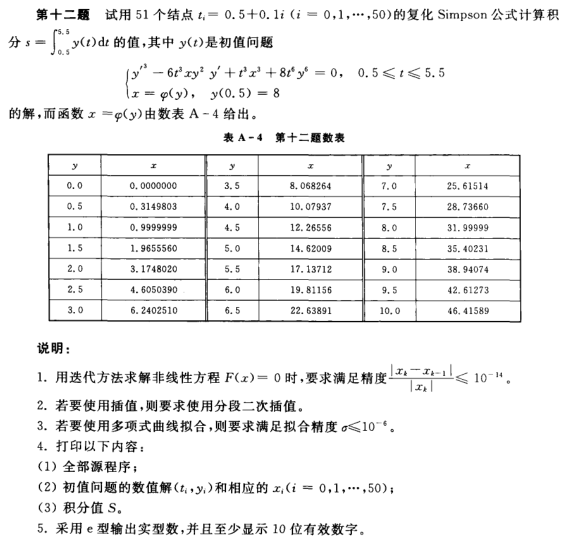
#include <iostream> #include <vector> #include <cassert> #include <math.h> using vec = std::vector<std::vector<double>>; using vecRow = std::vector<double>; //矩阵乘法 vec multi(vec A, vec B) { int row1{ static_cast<int> (A.size()) }; int col1{ static_cast<int>(A[0].size()) }; int row2{ static_cast<int>(B.size()) }; int col2{ static_cast<int>(B[0].size() )}; vec res(row1, vecRow(col2)); double temp{}; assert(col1 == row2 && "第一个矩阵的列和第二个矩阵的行不相等"); for (int i = 0;i != row1;++i) { for (int j = 0;j != col2;++j) { temp = 0; for (int k = 0;k != col1;++k) { temp += A[i][k] * B[k][j]; } res[i][j] = temp; } } return res; } //矩阵乘法 vecRow multi(vec A, vecRow B) { int row1{ static_cast<int> (A.size()) }; int col1{ static_cast<int>(A[0].size()) }; int row2{ static_cast<int>(B.size()) }; int col2{ 1 }; vecRow res(row1); double temp{}; assert(col1 == row2 && "第一个矩阵的列和第二个矩阵的行不相等"); for (int i = 0;i != row1;++i) { temp = 0; for (int j = 0;j != row2;++j) { temp += A[i][j] * B[j]; } res[i] = temp; } return res; } //高斯法求解方程 /* A:左式 B:右式 */ vecRow equationSolver(vec A, vecRow B) { //如果这里为vec&A vecRow&B ,则A和B的值会改变。如果没有&,则不变,改变的为A和B的副本 int row1{ static_cast<int> (A.size()) }; int col1{ static_cast<int>(A[0].size()) }; int row2{ static_cast<int>(B.size()) }; assert((row1 == row2) || (row1 > 0) && "请检查输入"); int point; double temp; double m; vecRow x(row1); if (row1 == 1) { x[row1] = B[row1] / A[row1][row1]; return x; } //一列一列来 for (int k = 0;k != col1 - 1;++k) { //选主元 point = k; //寻找k列中绝对值最大的数的行point for (int r = k;r != row1;++r) { if (fabs(A[point][k]) < fabs(A[r][k])) { point = r; } } //判断A是否为奇异矩阵 assert(fabs(A[point][k]) > 1e-6 && "A为奇异矩阵"); //换行 temp = B[k]; B[k] = B[point]; B[point] = temp; for (int i = 0;i != col1;++i) { temp = A[point][i]; A[point][i] = A[k][i]; A[k][i] = temp; } //消去 m = 0.0; for (int i = k + 1;i != col1;++i) { m = A[i][k] / A[k][k]; B[i] -= m * B[k]; for (int j = 0;j != col1;++j) { A[i][j] -= m * A[k][j]; } } } //解方程 double sum{ 0.0 }; x[row1 - 1] = B[row1 - 1] / A[row1 - 1][row1 - 1]; for (int i = row1 - 2;i >= 0;--i) { sum = 0.0; for (int j = i + 1;j != col1;++j) { sum += A[i][j] * x[j] / A[i][i]; } x[i] = B[i] / A[i][i] - sum; } /*for (double i : x) { std::cout << i << " "; }*/ return x; } //计算转置矩阵 vec transpose(vec A) { int row{ static_cast<int> (A.size()) }; int col{ static_cast<int>(A[0].size()) }; vec B(col, vecRow(row)); for (int i = 0;i != row;++i) { for (int j = 0;j != col;++j) { B[j][i] = A[i][j]; } } return B; } //计算多项式拟合的结果 /* c:系数矩阵 y:数组y,需要求解得出该数组中每一个y相对应的x */ vecRow cal_x(vecRow c, vecRow y) { int row_c{ static_cast<int> (c.size()) }; int row_y{ static_cast<int> (y.size()) }; double temp{}; vecRow result(row_y); for (int i = 0;i != row_y;++i) { temp = 0.0; for (int j = 0;j != row_c;++j) { temp += pow(y[i], j)*c[j]; } result[i] = temp; } return result; } //计算x=φ(y) double cal_x(vecRow c, double y) { int k{ static_cast<int> (c.size()) }; double x; x = 0.0; for (int j = 0;j < k;j++) { x += pow(y, j) * c[j]; } return x; } //计算误差 /* A和B分别时表格中给定的x值和计算拟合出的x值 */ double epsilon(vecRow A, vecRow B) { int row_A{ static_cast<int> (A.size()) }; int row_B{ static_cast<int> (B.size()) }; assert(row_A == row_B, "please check the input"); double mid{}; for (int i = 0;i != row_A;++i) { mid += pow(A[i] - B[i], 2); } return mid; } //返回方程求解的结果vecRow c,然后具体的k可以通过计算c的大小得出 //传入x=φ(y)的x和y /* x,y由题目给出 */ vecRow qxnh(vecRow x,vecRow y) { int k{ 2 }; int row_x{ static_cast<int> (x.size()) }; int row_y{ static_cast<int> (y.size()) }; assert(row_x == row_y, "please check the input"); double ep{}; vecRow result(row_x); while (1) { //构建A vec A(row_x, vecRow(k)); for (int i = 0;i!= row_y;++i) { for (int j = 0;j != k;++j) { A[i][j] = pow(y[i], j); } } vec AT{ transpose(A) }; //ATA vec ATA{ multi(AT,A) }; //ATy,该例中,y为x。函数重载 vecRow ATy{ multi(AT, x) }; vecRow c{ equationSolver(ATA,ATy) }; result = cal_x(c, y); ep = epsilon(result, x); if (ep <= 1e-6) { std::cout << "停止循环,此时k = " << k << ";多项式的阶数为:" << k - 1 << '\n'; return c; } else { ++k; } } } /* 打印出矩阵(调试用) */ void show(vec A) { for (vecRow i : A) { for (double j : i) { std::cout << j << " "; } std::cout << '\n'; } } /* 打印出矩阵(调试用) */ void show(vecRow A) { for (double i : A) { std::cout << i << " "; std::cout << '\n'; } } //牛顿法解方程 /* 已知t,y,x,求解y' */ double Newton(double t, double y, double x) { double epsilon = 1e-14; int M = 10000; double F; double dF; double ddy; int count; double dy; double dy_ = 0.0; int flag = 0; START: dy = dy_; count = 0; while (1) { F = pow(dy, 3) - 6 * pow(t, 3) * x * pow(y, 2) * dy + pow(t, 3) * pow(x, 3) + 8 * pow(t, 6) * pow(y, 6); dF = 3 * pow(dy, 2) - 6 * pow(t, 3) * x * pow(y, 2); ddy = F / dF; if (fabs(ddy / dy) <= epsilon) { return dy; } else { dy -= ddy; count++; } if (count < M) { continue; } else { flag++; if (dy_ == 0) { dy_ -= 2; } else if (dy_ < 0) { dy_ = -dy_; } else { dy_ += 2; dy_ = -dy_; } if (flag >= 1000) { std::cout << "牛顿法失败" << '\n'; return 0; } } goto START; } return 0; } //R-K法求解方程:已知t0和y0,多项式曲线拟合得出x0,牛顿法得出y',可求得对应的y(t) /* c:系数矩阵 t0:t的初值 y0:y的初值 h:计算步长 t_end:t的终值 除c外,其余参数可使用默认值 */ vecRow RK(vecRow c, double t0=0.5,double y0=8.0,double h=0.001,double t_end = 5.5) { int k{ static_cast<int> (c.size()) }; double x0{ cal_x(c, y0) }; double k1, k2, k3, k4; double t1, t2, t3; double y1, y2, y3; double x1, x2, x3; int count{ 0 }; int flag{ 0 }; int num{ static_cast<int> (((t_end - t0) / 0.1)+1) }; vecRow t(num); vecRow y(num); while (1) { if (count % 100 == 0) { flag = count / 100; //std::cout << "flag: " << flag << '\n'; t[flag] = t0; y[flag] = y0; } x0 = cal_x(c, y0); k1 = Newton(t0, y0, x0); t1 = t0 + 0.5 * h; y1 = y0 + 0.5 * h * k1; x1 = cal_x(c, y1); k2 = Newton(t1, y1, x1); y2 = y0 + 0.5 * h * k2; x2 = cal_x(c, y2); t2 = t1; k3 = Newton(t2, y2, x2); t3 = t0 + h; y3 = y0 + h * k3; x3 = cal_x(c, y3); k4 = Newton(t3, y3, x3); y0 += (h / 6.0) * (k1 + 2 * k2 + 2 * k3 + k4); t0 += h; if (k1 == 0 || k2 == 0 || k3 == 0 || k4 == 0) { continue; } count++; if (t0 > t_end+0.001) { break; } else { continue; } } //std::cout << "x0: " << x0 << '\n'; return y; } //复化simpson求解积分 /* y:y(t) m、h的定义见simpson公式 n:n个等距节点 */ double simpson(vecRow y, double h=0.1,int n=51) { double result; double ya{ y[0] }; double yb{ y[n-1] }; int m{ (n - 1) / 2 }; double sum1, sum2; sum1 = 0.0; for (int i = 1;i < m + 1;i++) { sum1 += y[2 * i - 1]; } sum2 = 0.0; for (int i = 1;i < m;i++) { sum2 += y[2 * i]; } result = (h / 3) * (ya + yb + 4 * sum1 + 2 * sum2); return result; } //创建t矩阵 /* t0:t的初值 n:t的个数 */ vecRow create_t(double t0 = 0.5,int n = 51) { vecRow t(n); for (int i = 0;i != n;++i) { t[i] = t0 + 0.5 * i; } return t; } int main() { vecRow x{ 0.000000,0.3149803,0.9999999,1.9655560,3.1748020,4.6050390,6.2402510, 8.068264,10.07937,12.26556,14.62009,17.13712,19.81156,22.63891, 25.61514,28.73660,31.99999,35.40231,38.94074,42.61273,46.41589 }; //int k ; int row_x{ static_cast<int> (x.size() )}; vecRow y(row_x); for (int i = 0;i != row_x;++i) { y[i] = 0.5 * i; } vecRow c{ qxnh(x,y) }; vecRow y2{ RK(c) }; vecRow t{ create_t()}; int n{ 51 }; vecRow x2(n); for (int i = 0;i!=51;i++) { x2[i] = cal_x(c,y2[i]); printf("t[%d]=%.10f y[%d]=%.10f x[%d]=%.10f\n", i, t[i], i, y2[i], i, x2[i]); } double S{ simpson(y2) }; printf("积分值S = %.10f\n", S); }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号