

实验6:开源控制器实践——RYU
一、实验目的
能够独立部署RYU控制器;
能够理解RYU控制器实现软件定义的集线器原理;
能够理解RYU控制器实现软件定义的交换机原理。
二、实验环境
Ubuntu 20.04 Desktop amd64
三、实验要求
(一)基本要求
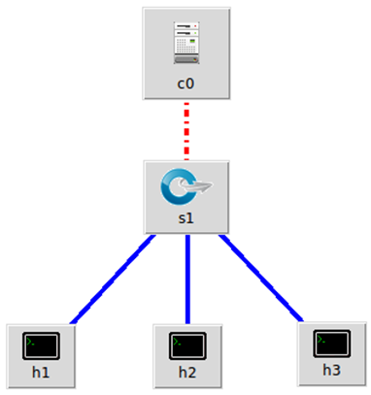
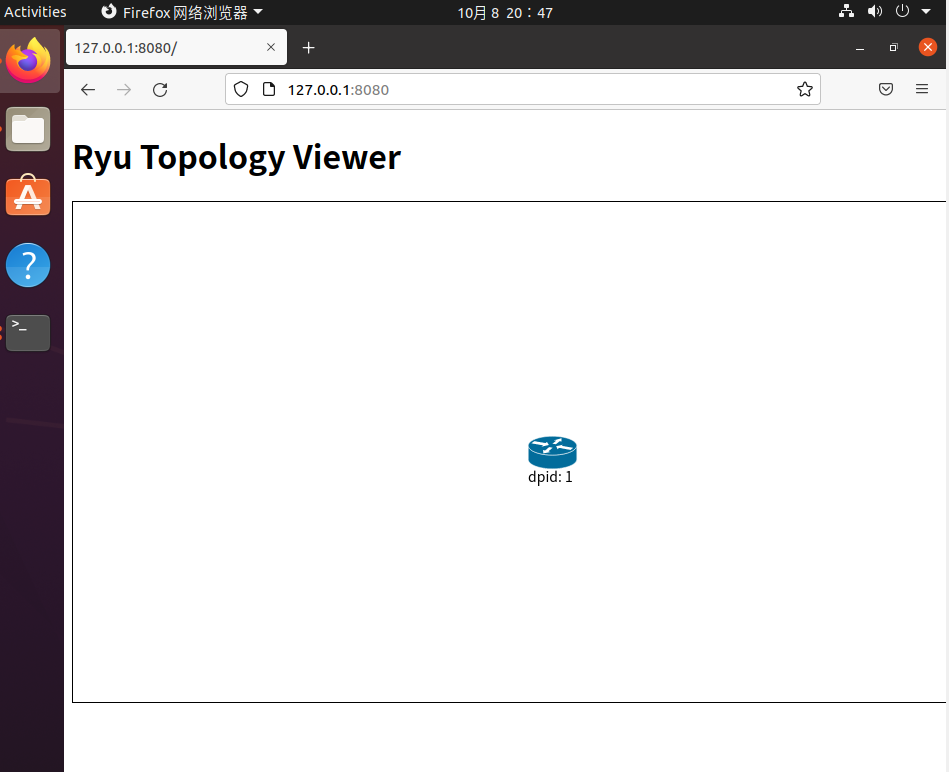
搭建下图所示SDN拓扑,协议使用Open Flow 1.0,并连接Ryu控制器,通过Ryu的图形界面查看网络拓扑。
ryu可视化查看拓扑
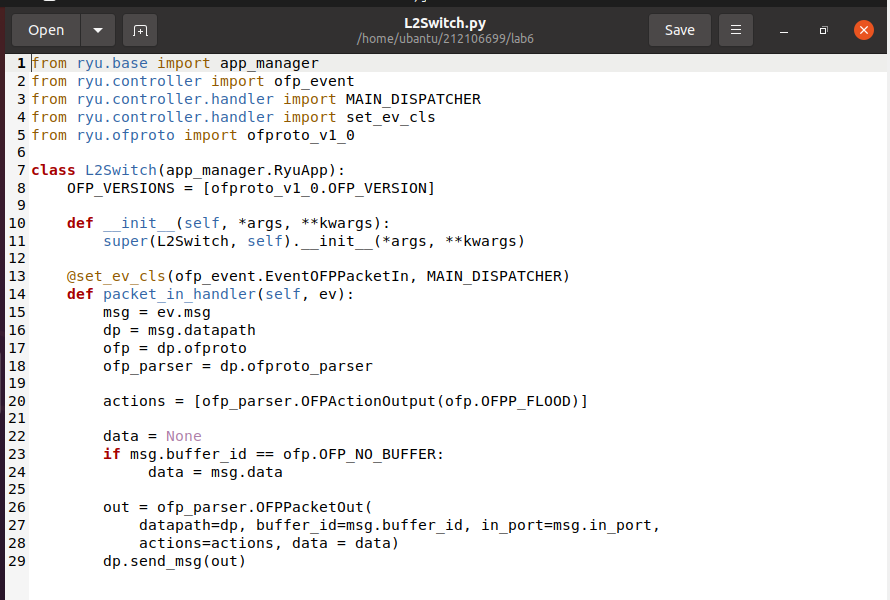
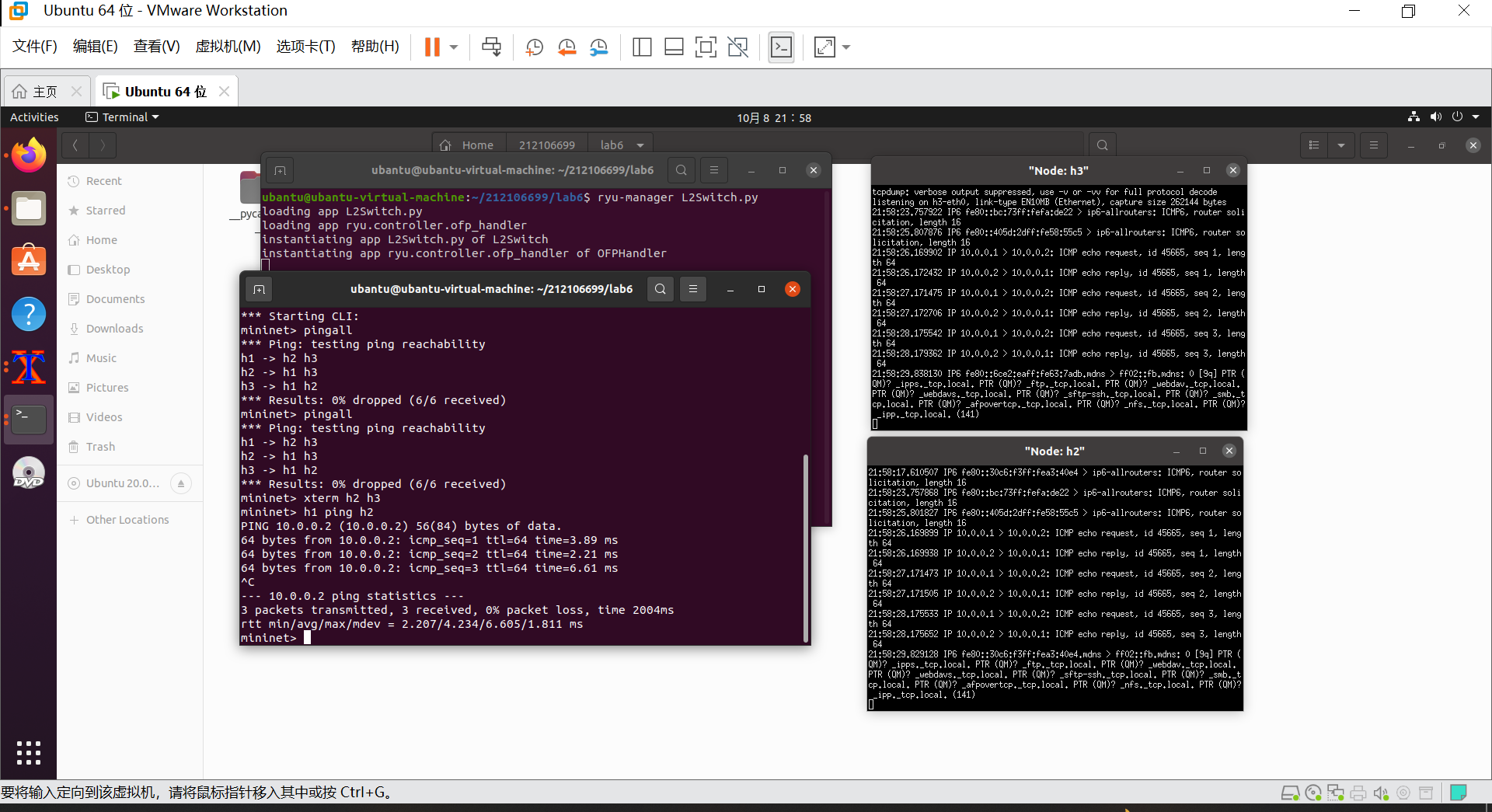
阅读Ryu文档的The First Application一节,运行当中的L2Switch,h1 ping h2或h3,在目标主机使用 tcpdump 验证L2Switch,分析L2Switch和POX的Hub模块有何不同。
构建拓扑,运行L2Switch模块,同时开启h2和h3终端,使用tcpdump进行数据包监听
*h1 ping h2(观察到h2,h3都接收到数据包)
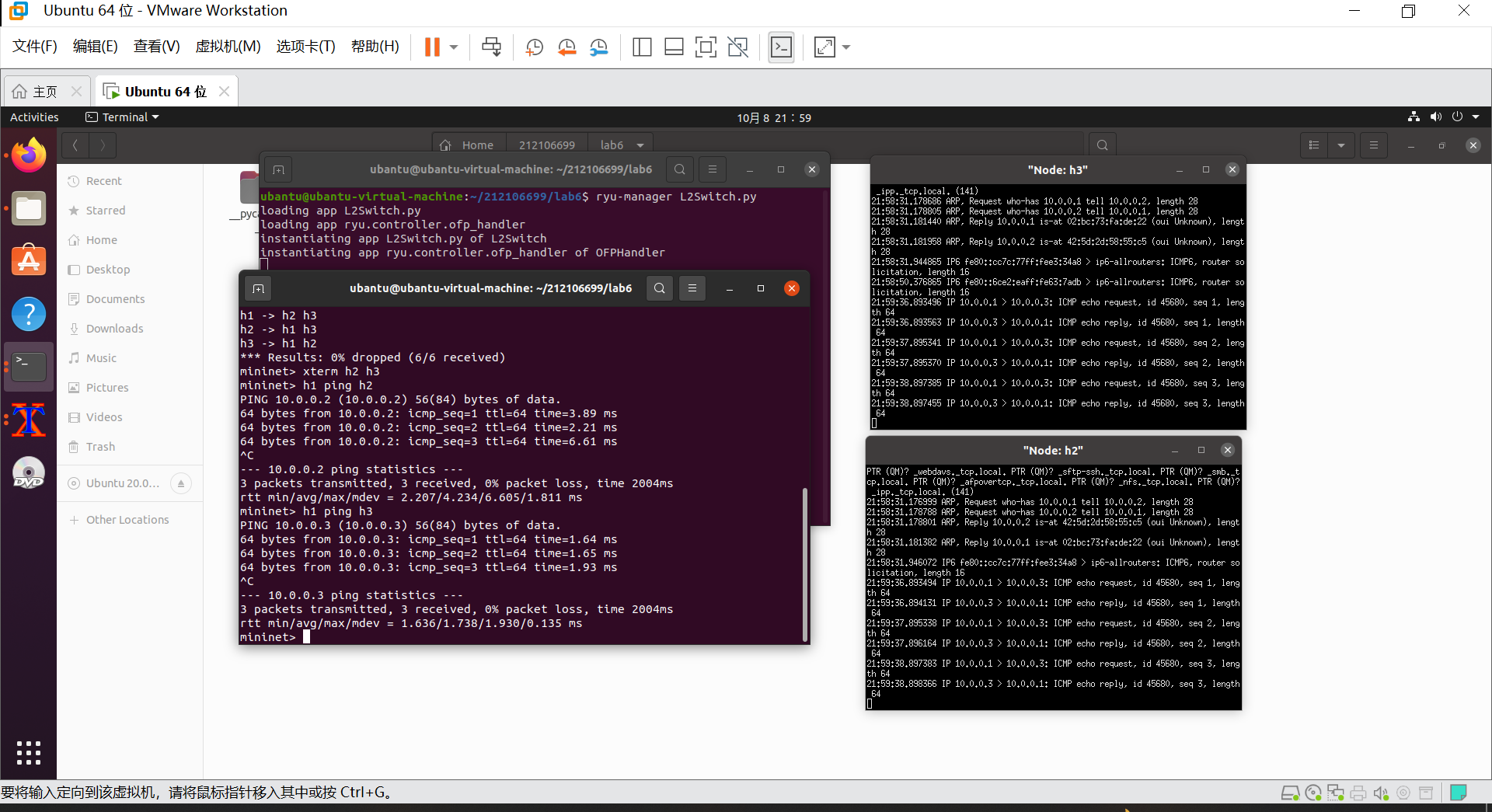
*h1 ping h3(观察到h2,h3都接收到数据包)
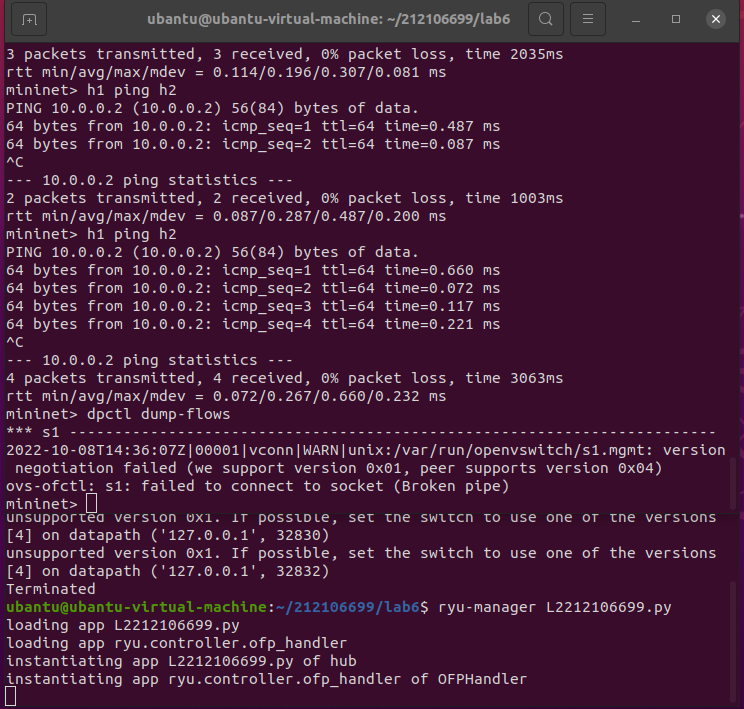
通过dpctl dump-flows命令检查ryu的L2Switch模块和pox的Hub模块的区别
*ryu

*pox

###不同点:
可以在pox的Hub模块运行时查看流表,而无法在ryu的L2Switch模块运行时查看到流表
编程修改L2Switch.py,另存为L2xxxxxxxxx.py,使之和POX的Hub模块的变得一致?(xxxxxxxxx为学号)
创建拓扑需要改成OpenFolw13的版本
from ryu.base import app_manager
from ryu.ofproto import ofproto_v1_3
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER, CONFIG_DISPATCHER
from ryu.controller.handler import set_ev_cls
class hub(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_3.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(hub, self).__init__(*args, **kwargs)
@set_ev_cls(ofp_event.EventOFPSwitchFeatures, CONFIG_DISPATCHER)
def switch_feathers_handler(self, ev):
datapath = ev.msg.datapath
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
# install flow table-miss flow entry
match = ofp_parser.OFPMatch()
actions = [ofp_parser.OFPActionOutput(ofproto.OFPP_CONTROLLER, ofproto.OFPCML_NO_BUFFER)]
# 1\OUTPUT PORT, 2\BUFF IN SWITCH?
self.add_flow(datapath, 0, match, actions)
def add_flow(self, datapath, priority, match, actions):
# 1\ datapath for the switch, 2\priority for flow entry, 3\match field, 4\action for packet
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
# install flow
inst = [ofp_parser.OFPInstructionActions(ofproto.OFPIT_APPLY_ACTIONS, actions)]
mod = ofp_parser.OFPFlowMod(datapath=datapath, priority=priority, match=match, instructions=inst)
datapath.send_msg(mod)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def packet_in_handler(self, ev):
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
in_port = msg.match['in_port'] # get in port of the packet
# add a flow entry for the packet
match = ofp_parser.OFPMatch()
actions = [ofp_parser.OFPActionOutput(ofproto.OFPP_FLOOD)]
self.add_flow(datapath, 1, match, actions)
# to output the current packet. for install rules only output later packets
out = ofp_parser.OFPPacketOut(datapath=datapath, buffer_id=msg.buffer_id, in_port=in_port, actions=actions)
# buffer id: locate the buffered packet
datapath.send_msg(out)

(三)实验报告
遇到的问题:
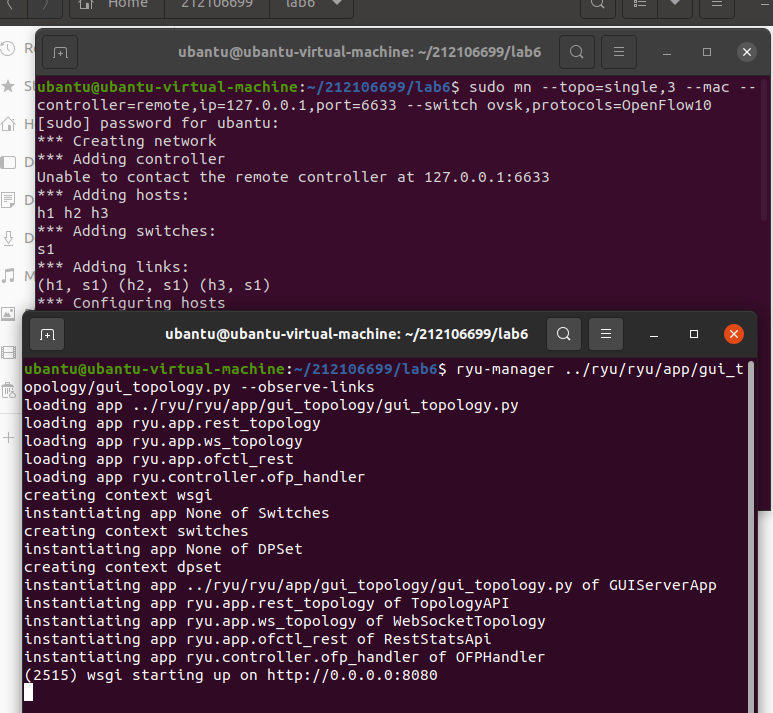
*在本次的实验中,我遇到创建的拓扑无法ping,可视化创建的拓扑又会与ryu的地址冲突,导致卡住了,后面在认真的看了老师下发的资料后,发现需要ryu-manager L2Switch后,创建的拓扑就可以ping通了
*其次,在本次实验中的修改代码,我也是遇到了极大的困难,不过在ryu文档,以及同学的帮助下,还是勉强写出来了,虽然也不知道对不对。。。。
*最后,在完成进阶要求的源码注释过程中,明显感觉到困难。原因有几点:首先,一开始对RYU的工作原理并没有十分了解;同时,源码中使用了许多RYU中定义的数据结构,阅读时根本没有一点的基础概念。基于此,我使用搜索引擎,查找了RYU使用的相应数据结构,并了解了其中各个参数的基本含义,再重新阅读源码,同时,在网上查找RYU工作原理的说明材料,才最终成功完成源码的注释。
个人感想:
*在本次实验中,通过阅读RYU文档并查看相关模块的源代码,了解了RYU控制器的工作原理,并比较了RYU的L2Switch模块与POX的Hub模块的异同。实验操作与前两次操作ODL和POX控制器差不多,因此能较为快速地完成对应步骤,而进阶部分则难度较大,尤其在阅读源码部分进度较慢。不过,虽然阅读源码的过程有些痛苦,但在过程中,查阅相关材料,结合源码进行阅读,也使得我对RYU的控制机制有了更为形象和深入的认识。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号