DP 优化学习笔记
目录
- 决策单调性优化 DP
决策单调性优化 DP
斜率优化
解决形如这样的 DP 方程 \(f_i = \max (f_j + A_iB_j + C_i + D_j)\),其中表示的 \(A_i\) 是和 \(i\) 有关的系数,其他同理。
如果没有 \(A_iB_j\) 这一项,我们可以轻松用单调队列解决,我们通过一道例题来引入这种优化。
【例题 1】P3195 [HNOI2008] 玩具装箱
读者不难写出动态规划方程如下:
其中 \(f_i\) 表示装下前 \(i\) 个物品的最小代价。
直接转移的时间复杂度是 \(\mathcal{O}(n^2)\) 的,不足以通过本题,我们需要一个 \(\mathcal{O}(n \log n)\) 甚至 \(\mathcal{O}(n)\) 的算法。我们来看看这个方程有什么特点,看到连续的求和,我们直接拆成前缀和,这个 \(\min\) 很重要,但是我们先省略不写。
此处记 \(s_x = \sum_{i=1}^{x} c_i\)。
然后可得:
现在项有点多,首先把常数项合并,记 \(L \leftarrow L + 1\),然后我们观察到有一些重复的东西,不妨记 \(a_x = x + s_x\),则有:
基础的转化到此结束。
我们去考虑 \(i\) 的两个决策点 \(x, y(x < y)\),思考一下如果在后面的决策更优,式子是什么样的。
这个结论的逆命题也成立,即当 \(x,y\) 对于某个 \(i\) 满足 \(2a_i\ge \dfrac{(f_y + a_y^2 + 2a_yL) - (f_x + a_x^2 + 2a_xL)}{a_y - a_x}\) 时,\(y\) 比 \(x\) 更优。
我们注意到 \(a_i = i + s_i\) 是单调递增的,也就是说,在我们从 \(1\) 到 \(n\) 枚举 \(i\) 时,这个 \(2a_i\) 是在不断变大的,我们想要的是一个最优的决策点,那么就可以使用单调队列维护这个东西,下文无特殊说明默认 \(q\) 为队列,\(h\) 为队头,\(t\) 为队尾。
假设当前有若干个决策点,我们依次加入这些决策点,每次加点前,按照上面的形式判断,直到队列中元素不足或者第一个元素是最优决策点,实际上我们就是不断地在做如下事情:
判断 \(h+1\) 是否比 \(h\) 更优,如果更优,弹出队头,重复上述操作,直至队列中只有一个元素或者不满足 \(h+1\) 比 \(h\) 更优。
这一步的正确性显然,因为 \(a_i\) 是递增的,那么现在如果有 \(h+1\) 比 \(h\) 更优,在之后的点一定也满足这一条件,更新答案,读者可以对照下文的代码理解一下。
点击查看代码
#include <bits/stdc++.h>
#define int long long
using namespace std;
#define pf(x) ((x) * (x))
const int N = 100005;
int n, L, a[N], s[N], f[N], h, t, q[N];
double calc(int x, int y) {
return (f[y] + pf(a[y]) + 2 * a[y] * L - f[x] - pf(a[x]) - 2 * a[x] * L) *
1.0 / (a[y] - a[x]);
}
// 此 calc 函数还可以化简,但没必要
signed main() {
ios_base::sync_with_stdio(0);
cin.tie(0), cout.tie(0);
cin >> n >> L;
for (int i = 1; i <= n; i++) {
cin >> s[i];
s[i] += s[i - 1];
a[i] = s[i] + i; // 和上文定义相同
}
L++;
// 注意一开始 h = t = 0,还隐含了一个 0 的决策点(从头开始选)
for (int i = 1; i <= n; i++) {
while (h < t && calc(q[h], q[h + 1]) <= 2 * a[i])
h++;
f[i] = f[q[h]] + pf(a[i] - a[q[h]] - L); // 转移
while (h < t && calc(q[t - 1], q[t]) >= calc(q[t], i))
t--;
q[++t] = i;
}
cout << f[n] << '\n';
return 0;
}
很好,这种方法可以在比赛时快速推出条件,但是我们并没有涉及斜率优化 DP 的本质。
重新审视一下 \(f_i = f_j + A_iB_j + C_i + D_j\) 这个方程。我们将其稍稍变形,得到 \(f_i - C_i = B_jA_i + (f_j + D_j)\),观察一下,把等式右边看作是一个关于 \(j\) 的一次函数,斜率为 \(B_j\),截距为 \(f_j + D_j\),我们要做的就是在当前所有直线中查询 \(x = A_i\) 时函数最大值或者最小值。
这会让人想到李超线段树,但用在这题未免大材小用,因为我们有很多性质,比如上文提到的 \(a_i\) 是单调的。
我们再换一种角度去理解它,这次换一种变形的方法,直接以【例题 1】的转移方程为例。
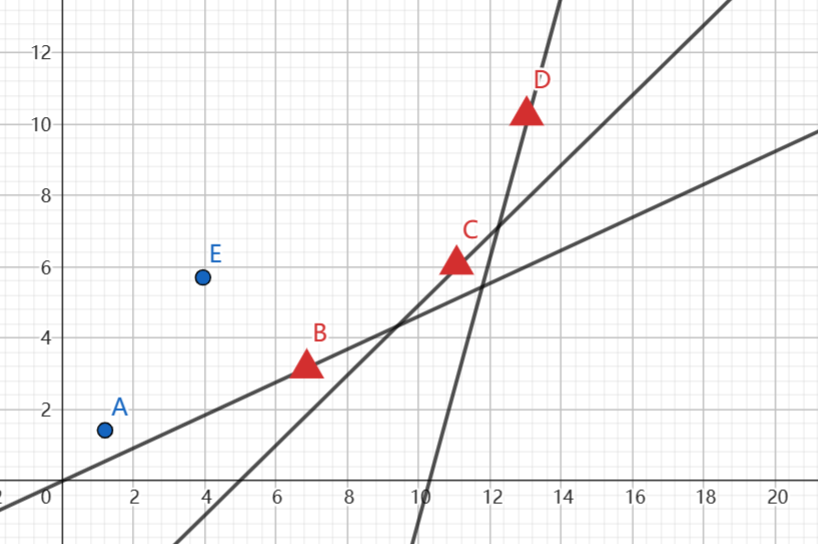
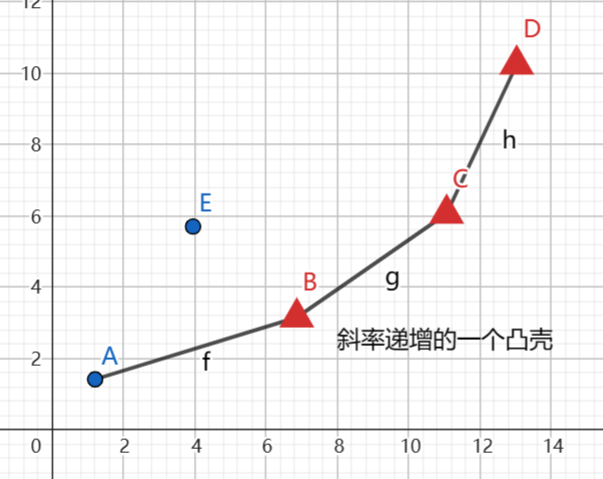
首先要明确一点,在转移 \(i\) 的时候,和 \(j\) 相关的量已经全都确定了,我们要求的就是当 \(k = 2a_i\),也就是斜率一定时,经过 \((a_j, f_j + a_j^2 + 2a_jL)\) 的直线中截距最小(因为要取 min)的那个,如图所示,一开始我们的直线在 \(B\) 点处最优,那么因为 \(a_i\) 时递增的,也就是说我们的斜率也是递增的,那么之前的 \(A,E\) 两点都不再是最优的,可以删去,换句话说,我们最后会得到一个下凸壳。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号