
分布式系统知识点十一:布隆过滤器详解(转载)
本系列为网上收集转载分布式相关知识点系列文章,并非原创。如果侵权,请联系我删除!!!
在进入正文之前,之前看到的有句话我觉得说得很好:
Data structures are nothing different. They are like the bookshelves of your application where you can organize your data. Different data structures will give you different facility and benefits. To properly use the power and accessibility of the data structures you need to know the trade-offs of using one.
大意是不同的数据结构有不同的适用场景和优缺点,你需要仔细权衡自己的需求之后妥善适用它们,布隆过滤器就是践行这句话的代表。
什么是布隆过滤器
本质上布隆过滤器是一种数据结构,比较巧妙的概率型数据结构(probabilistic data structure),特点是高效地插入和查询,可以用来告诉你 “某样东西一定不存在或者可能存在”。
相比于传统的 List、Set、Map 等数据结构,它更高效、占用空间更少,但是缺点是其返回的结果是概率性的,而不是确切的。
实现原理
HashMap 的问题
讲述布隆过滤器的原理之前,我们先思考一下,通常你判断某个元素是否存在用的是什么?应该蛮多人回答 HashMap 吧,确实可以将值映射到 HashMap 的 Key,然后可以在 O(1) 的时间复杂度内返回结果,效率奇高。但是 HashMap 的实现也有缺点,例如存储容量占比高,考虑到负载因子的存在,通常空间是不能被用满的,而一旦你的值很多例如上亿的时候,那 HashMap 占据的内存大小就变得很可观了。
还比如说你的数据集存储在远程服务器上,本地服务接受输入,而数据集非常大不可能一次性读进内存构建 HashMap 的时候,也会存在问题。
布隆过滤器数据结构
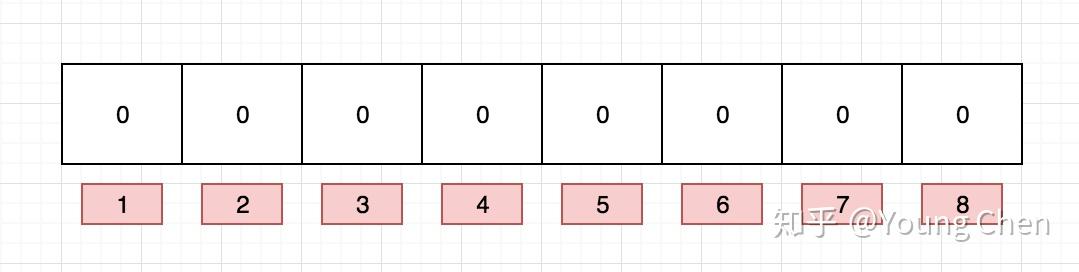
布隆过滤器是一个 bit 向量或者说 bit 数组,长这样:
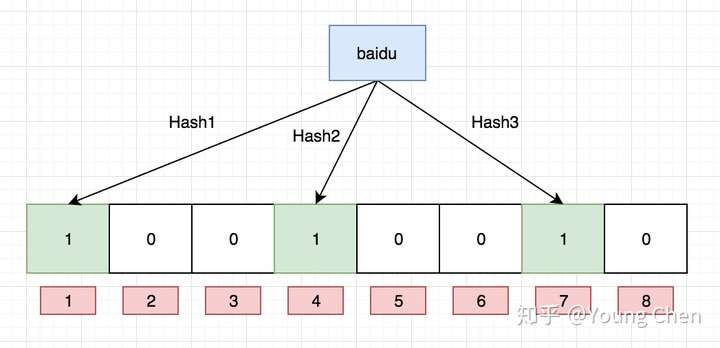
如果我们要映射一个值到布隆过滤器中,我们需要使用多个不同的哈希函数生成多个哈希值,并对每个生成的哈希值指向的 bit 位置 1,例如针对值 “baidu” 和三个不同的哈希函数分别生成了哈希值 1、4、7,则上图转变为:
Ok,我们现在再存一个值 “tencent”,如果哈希函数返回 3、4、8 的话,图继续变为:
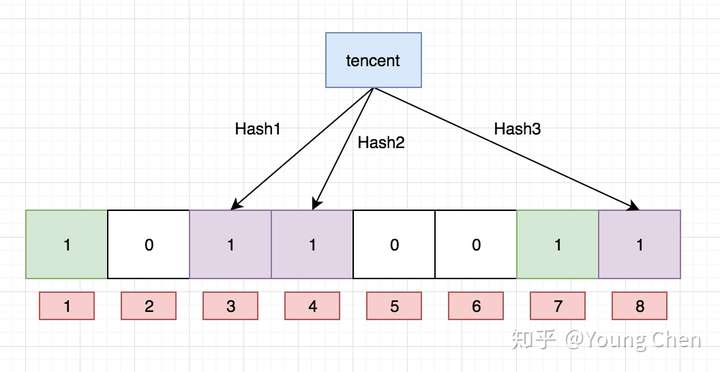
值得注意的是,4 这个 bit 位由于两个值的哈希函数都返回了这个 bit 位,因此它被覆盖了。现在我们如果想查询 “dianping” 这个值是否存在,哈希函数返回了 1、5、8三个值,结果我们发现 5 这个 bit 位上的值为 0,说明没有任何一个值映射到这个 bit 位上,因此我们可以很确定地说 “dianping” 这个值不存在。而当我们需要查询 “baidu” 这个值是否存在的话,那么哈希函数必然会返回 1、4、7,然后我们检查发现这三个 bit 位上的值均为 1,那么我们可以说 “baidu” 存在了么?答案是不可以,只能是 “baidu” 这个值可能存在。
这是为什么呢?答案跟简单,因为随着增加的值越来越多,被置为 1 的 bit 位也会越来越多,这样某个值 “taobao” 即使没有被存储过,但是万一哈希函数返回的三个 bit 位都被其他值置位了 1 ,那么程序还是会判断 “taobao” 这个值存在。
支持删除么
感谢评论区提醒,传统的布隆过滤器并不支持删除操作。但是名为 Counting Bloom filter 的变种可以用来测试元素计数个数是否绝对小于某个阈值,它支持元素删除。可以参考文章 Counting Bloom Filter 的原理和实现
如何选择哈希函数个数和布隆过滤器长度
很显然,过小的布隆过滤器很快所有的 bit 位均为 1,那么查询任何值都会返回“可能存在”,起不到过滤的目的了。布隆过滤器的长度会直接影响误报率,布隆过滤器越长其误报率越小。
另外,哈希函数的个数也需要权衡,个数越多则布隆过滤器 bit 位置位 1 的速度越快,且布隆过滤器的效率越低;但是如果太少的话,那我们的误报率会变高。
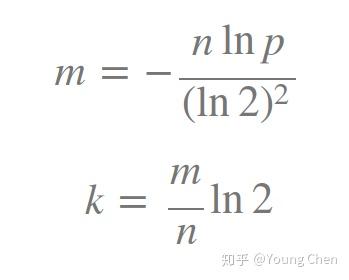
 k 为哈希函数个数,m 为布隆过滤器长度,n 为插入的元素个数,p 为误报率
k 为哈希函数个数,m 为布隆过滤器长度,n 为插入的元素个数,p 为误报率
如何选择适合业务的 k 和 m 值呢,这里直接贴一个公式:
如何推导这个公式这里只是提一句,因为对于使用来说并没有太大的意义,你让一个高中生来推会推得很快。k 次哈希函数某一 bit 位未被置为 1 的概率为:
插入n个元素后依旧为 0 的概率和为 1 的概率分别是:
标明某个元素是否在集合中所需的 k 个位置都按照如上的方法设置为 1,但是该方法可能会使算法错误的认为某一原本不在集合中的元素却被检测为在该集合中(False Positives),该概率由以下公式确定
最佳实践
常见的适用常见有,利用布隆过滤器减少磁盘 IO 或者网络请求,因为一旦一个值必定不存在的话,我们可以不用进行后续昂贵的查询请求。
另外,既然你使用布隆过滤器来加速查找和判断是否存在,那么性能很低的哈希函数不是个好选择,推荐 MurmurHash、Fnv 这些。
大Value拆分
Redis 因其支持 setbit 和 getbit 操作,且纯内存性能高等特点,因此天然就可以作为布隆过滤器来使用。但是布隆过滤器的不当使用极易产生大 Value,增加 Redis 阻塞风险,因此生成环境中建议对体积庞大的布隆过滤器进行拆分。
拆分的形式方法多种多样,但是本质是不要将 Hash(Key) 之后的请求分散在多个节点的多个小 bitmap 上,而是应该拆分成多个小 bitmap 之后,对一个 Key 的所有哈希函数都落在这一个小 bitmap 上。
来源:https://zhuanlan.zhihu.com/p/43263751
布隆过滤器的变种 Counting Bloom Filter 的原理和实现
0x00 前言
标准的 Bloom Filter 是一种比较简单的数据结构,只支持插入和查找两种操作。在所要表达的集合是静态集合的时候,标准 Bloom Filter 可以很好地工作,但是如果要表达的集合经常变动,标准Bloom Filter的弊端就显现出来了,因为它不支持删除操作。这就引出来了本文要谈的 Counting Bloom Filter,后文简写为 CBF。
0x01 原理
一、BF 为什么不支持删除
BF 为什么不能删除元素?我们可以举一个例子来说明。
比如要删除集合中的成员 dantezhao,那么就会先用 k 个哈希函数对其计算,因为 dantezhao 已经是集合成员,那么在位数组的对应位置一定是 1,我们如要要删除这个成员 dantezhao,就需要把计算出来的所有位置上的 1 置为 0,即将 5 和 16 两位置为 0 即可。

问题来了!现在,先假设 yyj 本身是属于集合的元素,如果需要查询 yyj 是否在集合中,通过哈希函数计算后,我们会去判断第 16 和 第 26 位是否为 1, 这时候就得到了第 16 位为 0 的结果,即 yyj 不属于集合。 显然这里是误判的。
二、什么是 Counting Bloom Filter
Counting Bloom Filter 的出现,解决了上述问题,它将标准 Bloom Filter 位数组的每一位扩展为一个小的计数器(Counter),在插入元素时给对应的 k (k 为哈希函数个数)个 Counter 的值分别加 1,删除元素时给对应的 k 个 Counter 的值分别减 1。Counting Bloom Filter 通过多占用几倍的存储空间的代价, 给 Bloom Filter 增加了删除操作。基本原理是不是很简单?看下图就能明白它和 Bloom Filter 的区别在哪。

三、Counter 大小的选择
CBF 和 BF 的一个主要的不同就是 CBF 用一个 Counter 取代了 BF 中的一位,那么 Counter 到底取多大比较合适呢?这里就要考虑到空间利用率的问题了,从使用的角度来看,当然是越大越好,因为 Counter 越大就能表示越多的信息。但是越大的 Counter 就意味着更多的资源占用,而且在很多时候会造成极大的空间浪费。
因此,我们在选择 Counter 的时候,可以看 Counter 取值的范围多小就可以满足需求。
根据论文中描述,某一个 Counter 的值大于或等于 i 的概率可以通过如下公式描述,其中 n 为集合的大小,m 为 Counter 的数量,k 为 哈希函数的个数。

在之前的文章《Bloom Filter 的数学背景》中已经得出,k 的最佳取值为 k = m/n * ln2,将其带入公式后可得。

如果每个 Counter 分配 4 位,那么当 Counter 的值达到 16 时就会溢出。这个概率如下,这个值足够小,因此对于大多数应用程序来说,4位就足够了。

关于 CBF 中 Counter 大小的选择,主要参考这篇论文:《Summary Cache: A Scalable Wide-Area Web Cache Sharing Protocol》,在论文的第 6、7 两页专门对其做了一番阐述。这里不再推导细节,只给出一个大概的说明,感兴趣的童鞋可以参考原论文。
0x03 简单的实现
还是实现一个简单的程序来熟悉 CBF 的原理,这里和 BF 的区别有两个:
- 一个是我们没有用 bitarray 提供的位数组,而是使用了 bytearray 提供的一个 byte数组,因此每一个 Counter 的取值范围在 0~255。
- 另一个是多了一个 remove 方法来删除集合中的元素。
代码很简单,只是为了理解概念,实际中使用的库会有很大差别。
import mmh3
class CountingBloomFilter:
def __init__(self, size, hash_num):
self.size = size
self.hash_num = hash_num
self.byte_array = bytearray(size)
def add(self, s):
for seed in range(self.hash_num):
result = mmh3.hash(s, seed) % self.size
if self.bit_array[result] < 256:
self.bit_array[result] += 1
def lookup(self, s):
for seed in range(self.hash_num):
result = mmh3.hash(s, seed) % self.size
if self.bit_array[result] == 0:
return "Nope"
return "Probably"
def remove(self, s):
for seed in range(self.hash_num):
result = mmh3.hash(s, seed) % self.size
if self.bit_array[result] > 0:
self.bit_array[result] -= 1
cbf = CountingBloomFilter(500000, 7)
cbf.add("dantezhao")
cbf.add("yyj")
cbf.remove("dantezhao")
print (cbf.lookup("dantezhao"))
print (cbf.lookup("yyj"))
0xFF 总结
CBF 虽说解决了 BF 的不能删除元素的问题,但是自身仍有不少的缺陷有待完善,比如 Counter 的引入就会带来很大的资源浪费,CBF 的 FP 还有很大可以降低的空间, 因此在实际的使用场景中会有很多 CBF 的升级版。
比如 SBF(Spectral Bloom Filter)在 CBF 的基础上提出了元素出现频率查询的概念,将CBF的应用扩展到了 multi-set 的领域;dlCBF(d-Left Counting Bloom Filter)利用 d-left hashing 的方法存储 fingerprint,解决哈希表的负载平衡问题;ACBF(Accurate Counting Bloom Filter)通过 offset indexing 的方式将 Counter 数组划分成多个层级,来降低误判率。这些内容,有机会再分享。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号