
MEA总复习
MEA总复习
多电飞机
传统飞机包括几种能源:
- 电力:航电系统(avionics),乘员(灯光,厨房 galley,娱乐 entertainment等),航行灯、风扇、泵
- 气动 pneumatic:舱室加压,空调,防冰
- 液压 hydraulic:飞行控制面作动,起落架收放、操纵,刹车,门
- 机械:发动机燃油泵
其劣势包括:系统复杂度高,重量大,维护和运营成本高;
从发动机引气(发动机产生的高温、高压的压缩空气,给上述气动系统),效率低、浪费功率(减少产生推力的核心气流量),需要增加燃油流量、导致温度上升(为维持推力,需要燃烧更多燃油,且燃烧室、发动机整体工作温度因为额外做功,有所上升);
为发电、液压泵等提取轴功率时,需要涡轮在给定转速下做额外的功(对轴产生负载),这要求提高涡轮进口温度(让驱动涡轮的燃气拥有更高的能量)。
多电飞机的目的是“消灭”(eradicate)气动、液压、机械能源,即把所有非推进用的能源全部用电力。


飞机采用更多电力的好处:
- 减重:不用液压油,因此比液压系统轻
- 易维护:电气系统比气动、液压、机械系统,能更快且更方便地更换,因而大大缩短了航班延误时间
- 提高发动机效率:不用从发动机引气,采用电力防冰措施
不过,虽然电力防冰措施(在发动机、机翼的外表面安装电加热垫)能直接提高发动机效率,但这导致机载用电需求大幅增加,一定程度上加重发动机负荷。 - 减少在地面使用发动机:传统飞机地面滑行的时候需要使用主引擎,由于气流速度低、功率需求远低于巡航设计点,其效率很低;
绿色滑行技术使用连接到起落架的电机,在地面驱动飞机,降低了地面噪音、燃油消耗、CO2排放。 - 可控性:电气系统对电力需求变化的响应速度,远快于气动、液压、机械系统。
- 可重构性:系统故障时,电力系统可通过自动重构保持功能,提升了可靠性、安全性和系统可用性。
- 先进诊断和预测(diagnostics and prognotics):电气系统可以在运行期间持续监控系统表现,从而实施智能管理,以预防或减轻未来故障。
- 概述:减少运营花费、燃油消耗、环境影响。
电力系统架构:

架构说明:
- 对称布局,基于左右两台发动机,采用相同的架构设计
- 主动力源为两台发动机,备用电源为蓄电池、APU、冲压空气涡轮(ram air turbine)
- 每台发动机驱动两台作为发电机的磁场控制同步电机,并由独立的发电机控制但愿调控,以维持所需电压
- 电能通过4条高压、交流配电母线传输,母线通过互联系接触器实现冗余连接
- 设两类配电中心,主电力配电中心向防冰、环控、备用电池、其他交/直流负载供电,核心电力配电中心向保障异常/紧急飞行状态下,控制飞机所需的核心电力负载,以高可用性标准供电
发动机
多电发动机把发动机的控制元件,从机械驱动转换为电力驱动。
这些元件主要包括:燃油泵、滑油泵、作动系统、发动机启动、引气、防冰。
启动传统飞机发动机的方法有两种:
- 液压:使用地面供应提供液压压力,传输到辅助齿轮箱内的液压泵,液压压力差带动泵旋转,进而通过齿轮箱带动发动机运转,当发动机达到规定转速时断开。适用于小型航空器。
- 气动:利用APU/另一台已经启动的发动机/地面装置引气。
启动多电发动机的方式:使用直流电动机,从飞机的直流电源系统/地面电源获取电力;随着起动机转速的提升,逐渐增加供给电压,平稳增加发动机转速;发动机启动后,起动机以发电机形式工作,为飞机输送电力。
发电机
基本原理:电磁感应,变化的磁场产生电动势,电路中的感应电动势,与通过该闭合回路围成曲面的磁通量变化率成正比。
感应电动势:
$$\begin{equation}\epsilon=-N\frac{d\phi}{dt}\end{equation}$$单根导体切割磁感线的感应电动势:
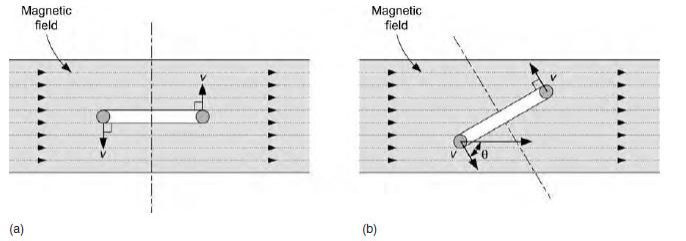
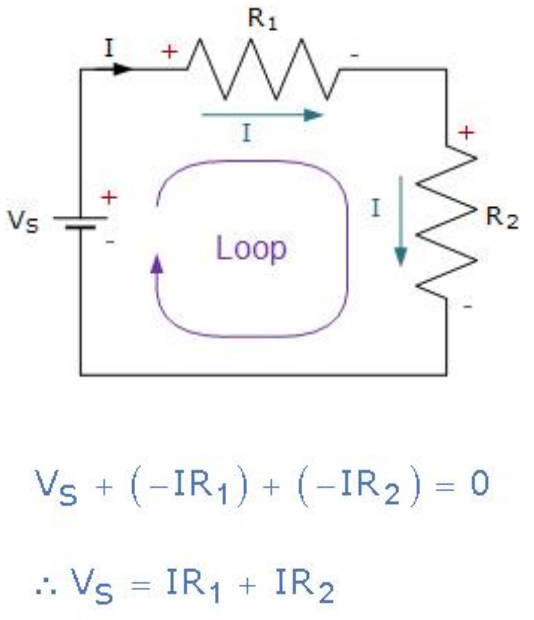
基尔霍夫电压定律:在任一闭合回路中,沿环路各段电压的代数和恒等于0.
电机原理:线圈和磁场发生相对运动(线圈切割磁感线、磁感线切割线圈),则线圈中会产生电动势。
发电机中,产生磁场的部分称为励磁系统(field),感应出电压的部分称为电枢(armature)。
发电机包含两个机械部件,转子(旋转部件)和定子(静止部件)。
在直流发电机中,电枢是转子;在交流发电机中,电枢可以是转子或定子。
同步电机的工作原理:在电机转子上建立磁场——施加外部驱动力——转子旋转,定子线圈绕组中感应出电压——感应电压频率和转子转速同步:
$$\begin{equation} n_s=\frac{120f_e}{p} \end{equation}$$$n_s$是转速,$f_e$是感应电动势频率,p是磁极数量。
交流发电机(alternator)的分类:旋转电枢发电机,磁场静止、电枢旋转,交流电通过滑环和电刷直接传输到负载,在高压下绝缘难度大;
旋转磁场发电机,电枢固定、磁场旋转,适用于高压工况。
电机组件:
- 励磁机(exciter):较小的直流发电机,提供维持交流发电机磁场所需的直流电。
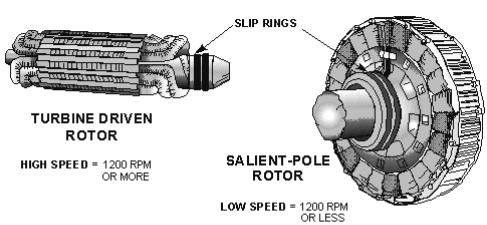
- 原动机(prime mover):驱动转子旋转的机械动力源。
- 转子:涡轮驱动(turbine driven,适用于高速旋转)、凸极转子(salient-pole).
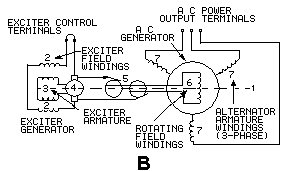
励磁过程:
- 励磁机内的励磁绕组2,建立强磁场
- 通过原动机,让励磁机内的电枢3旋转,使得该电枢上感应出电压
- 励磁机的电压输出4,通过滑环和电刷5,连接到主交流发电机的励磁机绕组6
- 主交流发电机内的原动机,驱动励磁绕组6旋转,这样其产生的磁通量穿过并切割主交流发电机的电枢绕组7
交流电压控制原理:交流发电机的感应电压,取决于每绕组串联的导体数量、磁场切割绕组的转速、磁场强度。
为控制电压,需改变励磁机的磁场强度。
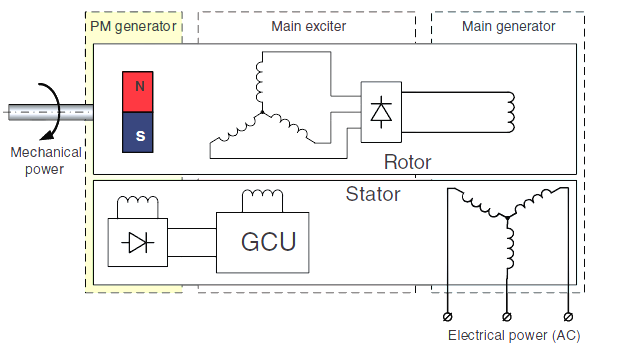
三级磁场控制同步电机的工作原理:
- 永磁发电机产生供电控制单元所需电力。
- 使用供电控制单元,调节主励磁机的定子绕组电流,进而改变主励磁机的转子绕组中产生的感应电流。
- 主励磁机产生的感应电流,经整流后,进入主发电机的转子绕组,然后通过测定的主发电机输出电压,对主励磁机的定子电流进行反馈控制,使得主发电机的定子输出电压维持在恒定值。
采用这种电机设计的好处:
- 经过验证的可靠性和安全性;
- 通过GCU调节励磁电流,可以轻松、精准地控制输出电压。
使用dq模型描述同步电机的好处:
- 计算更简便;
- 可以独立控制电流、电压的有功分量(d轴)和无功分量(q轴);
- 在dq坐标系中,由于互感为恒定值,系统操作员能实现预期输出;
- 涉及直流量时,使用各类反馈控制器,能提供高效可靠的控制解决方案。
发电机控制单元(generator control unit)结构:

电机
交流电机分成两种:同步电机和感应电机。
同步电机:电机转速等于磁场的旋转速度,和供电频率同步。
同步电机中三相旋转磁场的产生:
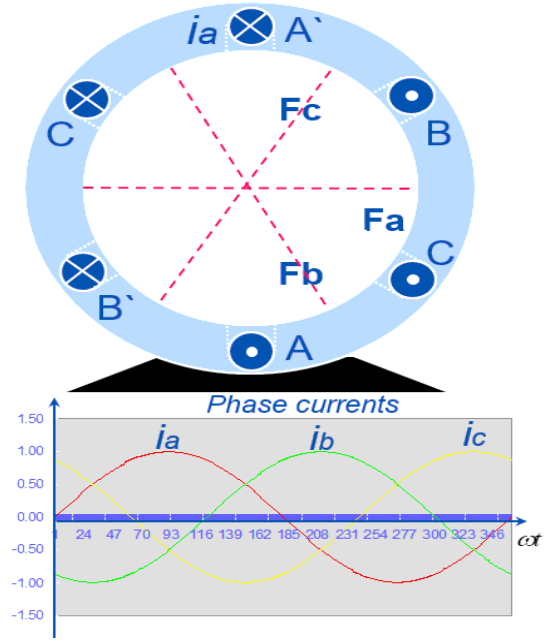
- 在电机定子上,有三套独立的、成120度安装的绕组线圈,A-A‘,B-B',C-C';
- 当向这三套绕组通入三相交流电时,每一套绕组会分别产生一个大小、方向岁时间正线变化的脉动磁场;
- 三个磁场叠加在一起时,它们合成的总磁场,是一个以恒定幅值、转速,在空间中旋转的旋转磁场。
感应电机/异步电机:
-
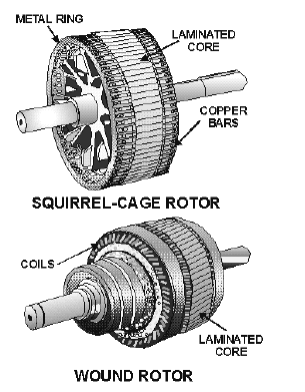
三相感应电机的定子结构和同步电机相同,但转子结构不同,最常见于感应电机的是鼠笼式(squirrel-cage)绕组。
-
原理:定子中产生的旋转磁场,在转子中感应出磁场;
旋转的磁场和转子相互作用,驱动转子转动;
由于感应电动势会试图阻碍引起它的磁场变化,感应电动势和合成磁场会对转子施加作用力,抵消转子和定子磁场间的相对运动,从而使得转子沿着定子旋转磁场的方向转动。
【异步电机原理!】https://www.bilibili.com/video/BV1jP4y1R7bD?vd_source=7e5e34f8276fd18e94d3486b7516c07f -
滑差(slip):旋转定子磁场速度和转子速度之间的差异。
$$\begin{equation} \text{Per-unit slip}=\frac{(\text{synchronous speed})-(\text{rotor speed})}{\text{synchronous speed}} \end{equation}$$ -
开关磁阻电机(switched reluctance motor):
![image]()
转子始终试图沿着磁阻最低的路径对齐;
由于磁通量穿过最小的磁阻路径,电机转子会和通电的定子磁极对齐;
当对角相对的磁极通电时,转子实现对齐;
开关磁阻电机的定子上有绕组,但转子上没有绕组,因此相对更节省材料。
(比如A通电,转子对齐A;下一步,A断电、B通电,转子对齐B;接着,B断电、C通电,转子对齐C... 一个步进电机。)
【动画详解磁阻电机工作原理】https://www.bilibili.com/video/BV1yG411B79T?vd_source=7e5e34f8276fd18e94d3486b7516c07f

直流电机:
- 当一个载流导体放置在磁场中时,这个导体将受到一个力(安培力)的作用,这个力驱动电机转动。
-
使用左手定则判断载流导体在磁场中所受力的方向:食指从磁场N极指向S极,中指指向电流方向,拇指指向导体受力方向。
-
直流电机转矩:
$$\begin{equation} T_a=K\Phi I_a \end{equation}$$其中,$T_a$是电枢产生的电磁转矩,$K=\frac{PZ}{2\pi a}$(P是电机磁极数,Z是电枢导体总数,a是电枢绕组中的并联支路数)是电机结构参数,$\Phi$是每极磁通量,$I_a$是电枢电流。
-
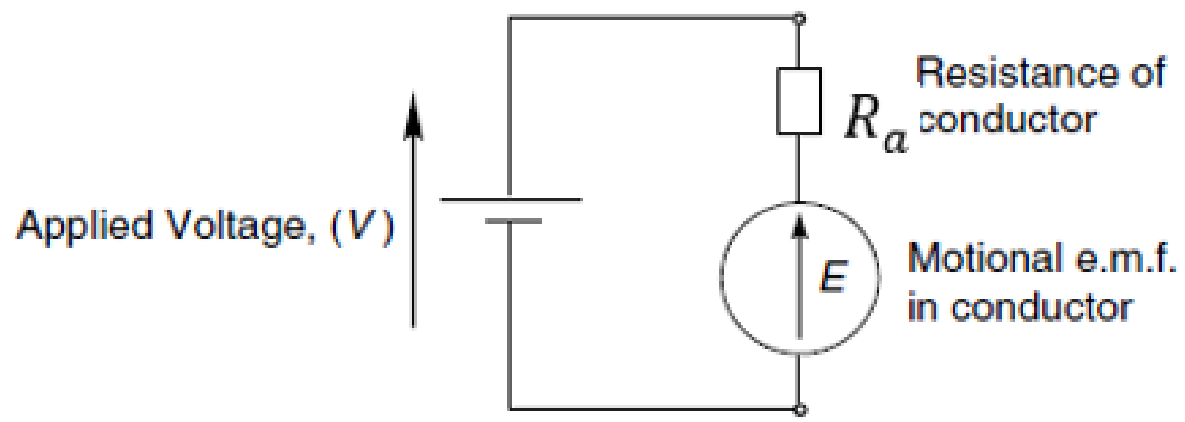
反电动势:当直流电机转子在磁场中旋转时,由于导体切割磁感线,会产生一个感应电动势,和外加的电源电压V方向相反:
$$\begin{equation} E=V-I_aR_a \end{equation}$$对于发电机,产生的感应电动势大于输出的端电压,由于内部电压降的影响;
$$\begin{equation} E=K\Phi\omega \end{equation}$$
对于电动机,产生的反电动势应小于输入的电源电压,因为电源电压需要克服反电动势、电机内部电压降影响。
另一个反电动势的计算公式为:其中$\omega=\frac{2\pi N}{60}$是电机旋转的角速度,单位rad/s。
-
直流电机等效电路图:
![image]()
永磁直流电机:
-
使用永磁体产生电机运行所需的磁场。
-
通过改变施加到转子绕组上的电压,磁场保持不变,是PMDC电机常用的调速方法。
- 升高电枢电压,当反电动势E还没有马上改变时,电枢电流增大。
- 根据电磁转矩公式,电枢电流增大,电磁转矩随之增大。
- 当电磁转矩大于负载转矩时,一个净正向加速转矩形成,电机转速开始上升。
- 根据反电动势公式8,电机转速上升,反电动势随之增大。
- 根据公式7,反电动势增大,电枢电流逐渐减小。
- 电枢电流减小,电磁转矩减小,直到电磁转矩和负载转矩相等,此时电机达到稳定运行转速。
-
优点:体积更小、功率密度更高,因为取消了电刷、换向器,而且永磁体的磁能积更高;
更便宜,因为使用永磁体替代了励磁绕组和铁芯,简化了制造过程,并降低了成本;
电机整体效率提高,因为没有励磁电路的铜损。 -
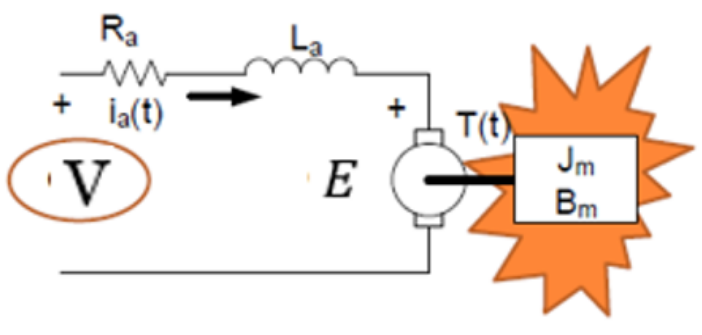
数学模型/传递函数:
![image]()
-
电压方程:
$$\begin{equation} \mathrm{V}=R_aI_a+L_a\frac{dI_a}{dt}+E \end{equation}$$反电动势方程:
$$\begin{equation} E=K_v\omega \end{equation}$$这里$K_v$是速度常数(或反电动势常数)。
-
机械方程:
$$\begin{equation} K_tI_a=J_m\frac{d\omega}{dt}+B_m\omega \end{equation}$$这里$K_t$是转矩常数,$J_m$是转子和所连接的等效机械负载的总转动惯量,$B_m$是和电机机械旋转系统相关的阻尼系数。
$$\begin{equation} T(t)=K_tI_a \end{equation}$$
电流-转矩方程:
-
电驱动作动器
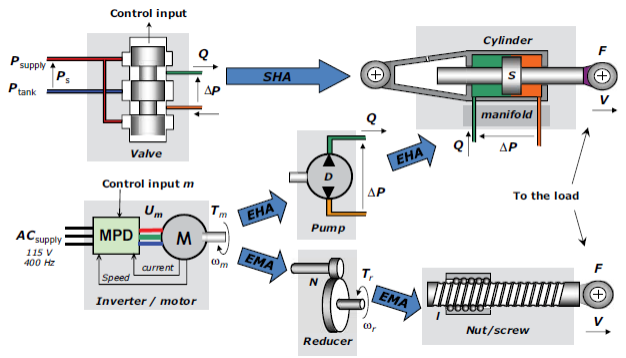
传统作动器——液压伺服作动器(hydraulic servo actuator, HSA),通过集中式动力网络,以恒定的液压压力供能。
其动力控制方式为,通过计量阀(metering valve)节流,把驱动负载所需压力以外的全部供压,作为余压浪费掉。
虽然这种控制方式效率较低,但动态响应性能很好。
电静液作动器(electro hydrostatic actiator, EHA)使用电机控制电子装置(motor control electronics, MCE),精确调节从飞机电网传输到电动机的功率。
它使用电动机驱动柱塞泵(positive displacement pump),和作动筒形成闭式静压回路。
机电作动器(electro-mechanical actuator, EMA)彻底取消了液压油传动,由无刷直流电机、齿轮箱/减速器、滚珠丝杠(ballscrew actuator)作动机构组成。
使用机电作动器的好处:
- 减轻重量(相比液压),降低维护、生产成本;
- 对系统需求变化的响应比液压更快;
- 比液压作动器可靠性更高,且支持自动重新配置以维持功能。
电力电子变换器
变压器整流装置(transformer rectifier unit):集成变压器和整流器的功能,用于把发动机/APU/地面电源单元(ground power unit, GPU)提供的交流电,转为28V直流电,其输出的电流可用于直流汇流条供电。
多电飞机电力系统架构图当中,“蓄电池充电整流装置”(battery charge rectifier unit)是自耦变压器整流装置(autotransformer rectifier unit,ATRU)。
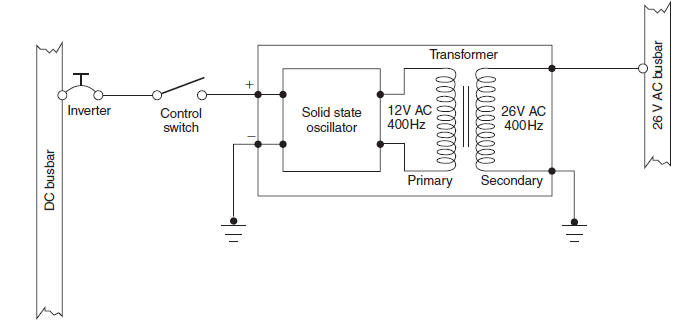
逆变器(inverter)用于把直流电转为交流电,电池输入,输出低电压(26V,用于仪器)或高电压(115V,单相/三相,驱动泵等负载)。
逆变器分为旋转逆变器和静态逆变器(rotary/static)。
典型旋转逆变器采用四级、复励磁、直流电动机,驱动星形绕组交流发电机。
自耦变压器整流装置:把三相115V/230V交流电,转为20V/540V直流电;
用于为变频电子转换器供电,控制执行机构电机,如A380的电动反推作动系统(electrical thrust reverser actuation system)。
自耦变压器单元(autotransformer unit):变压器是通过电感耦合导体,把电能从一个电路转换到另一个电路的装置。
作为电源使用的变压器,可视为具有输入端(初级导体/绕组)和输出端(次级导体/绕组)。
初级绕组中,变化的电流产生变化的磁场,该磁场在次级绕组中,感应出变化的电压;通过在次级绕组上串联负载,电流就能在变压器中流动。
降压-升压转换器(buck boost converter):直流到直流转换器,其输出电压可以低于或高于输入电压,输出电压幅值取决于占空比(duty cycle)。
该转换器由MOSFET、二极管、电感和电容构成,向MOSFET提供PWM信号,使得其像开关一样工作。
配电系统
配电系统包含如下组件:母线排(busbar),保护装置,控制系统,线缆网络,用电负载。
-
CEPDS(centralized electrical power distribution system, 集中式电力分配系统)是一个点对点的径向配电系统,它只有一个配电中心。
发电机为这个配送中心供电。
电能被处理并提供给不同的电负载。
配电中心通常位于航电箱中。在本系统中,每个负载由配电中心单独供电。 -
半分布式电力分配系统(semi-distributed electrical power distribution system, SDEPDS)拥有更多数量的配电中心,围绕飞行器分布式布局,靠近负载中心,优化了系统体积、重量和可靠性。
-
先进电力分配系统(advanced electrical distribution system):由冗余微处理器系统控制的灵活、容错系统。
![image]()
该系统具备高度防护特性(highly protected):- 输入:主发电机、APU、蓄电池、地面电源的电力
- 处理:主配电中心,配置有接触器控制单元(contactor control unit)和大功率接触器;
整个系统由两套冗余电力负载管理单元(redundant electrical loal management units)中的任意一个控制,它通过4重冗余数据总线,和远程终端(remote terminal, RT)进行交互,并交换数据和控制策略 - 输出:飞机负载通过继电器切换单元(relay switching units,RSU)供电,每个RSU由远程终端进行控制和监测。
-
容错电力分配系统(fault tolerant electrical power distribution system, FTEPDS):由两个开关矩阵、6台多用途变流器、6台发电机和不同负载组成;
电源和负载开关矩阵可采用机械或固态开关,固态开关具有可控性强、响应速度快、效率高等优势。

建模技术
在为电动动力系统(electric power system, EPS)建模时,仿真所需的高计算需求是一个挑战,特别是模拟大型系统或高度复杂模型时。
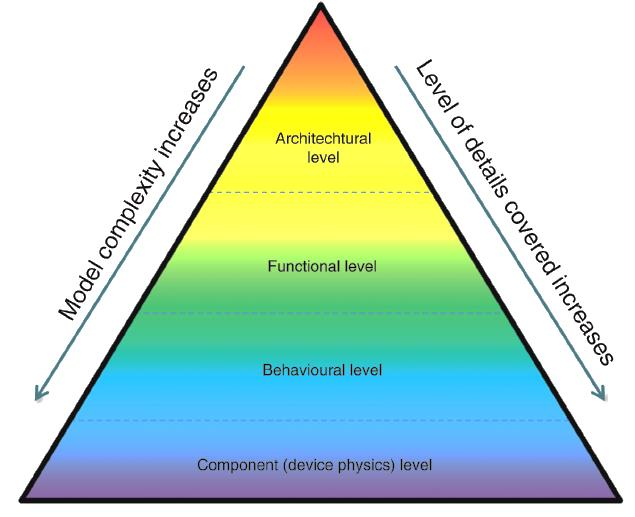
提出了4级建模范式(paradigm),以提供灵活、适应性强的电动动力系统仿真方法。
这些层级可以在系统/子系统内部混合使用,从而在重点关注区域,实现更精细的建模细节。
或者说,在我们关心的关键部分,使用非常精细的模型,而在其他次要部分使用相对简化的模型。
-
组件(component)/器件物理(device physics)级别:体现EPS组件最详尽的属性特征,验证单一组件(如一个晶体管、一个电容器)中的物理现象;
可以整合多个物理域特性,包括电能的质量、热力学行为、机械特性、电磁兼容性(electromagnetic compatibility, EMC)表现。 -
行为(behavior)层级:处理系统和组件在千赫兹量级的动态特性,例如电路板上的一个电源模块;
包含功率电子变换器(power electronic converter)开关,用于研究谐波和传导电磁兼容性的影响,这些变换器(如逆变器、DC-DC转换器)中含有半导体开关(如MOSFET、IGBT),谐波是对理想正弦波的干扰,传导电磁干扰是通过导线传播的干扰;
完整的电力系统模型可建模为边界变量组(代表电压)、电流源和/或代表阻抗,以实现高效时序仿真,例如把一个电源模块,等效成一个理想电压源串联一个输出阻抗。 -
功能(function)层级:处理低频、瞬态行为,如几赫兹到几百赫兹,描述系统在某个工作点附近的动态行为。
该级别的主要目的包括基于仿真的EPS动力学和稳定性,对负载冲击和脱落的响应(用电设备突然增加或减少),以及低频电能质量(电压骤降/升,频率偏差)的研究。
为了进行经典的小信号分析,在这个水平上建立的模型适合进行线性化,如传递函数、根轨迹法,评估系统稳定性和动态性能。 -
架构(architecture)层级:考虑稳态下的全局电力推进系统,其长期的、平均的能量流和功能实现,可有条件地划分为两个子层面:
- 逻辑子层面,研究电力推进系统架构的功能完整性,如电源是否能满足所有负载的需求,保护系统是否能正确隔离故障;
- 需求子层面,针对电力推进系统组件的规格设计,以满足给定的负载需求,如根据航电设备需要什么电压等级的电能,确定变换器的具体参数。
发电方式的拓扑结构
- 恒频(constant frequency)拓扑:
![image]()
飞机发动机提供旋转动力;
恒速度驱动装置(constant speed drive,是一个机械装置)接收发动机的轴速度输入,并转换为恒定速度的输出轴;
发电机接收恒速度旋转动力,产生恒定频率的交流电。 - 变速恒频(variable speed constant frequency, VSCF)拓扑,用电力转换器调节输出功率,比机械装置效率更高:
![image]()
飞机发动机提供变速的旋转动力;
发电机从发动机接收旋转动力,产生频率可变的交流电;
二极管整流器把发电机输出的交流电转化为直流电;
功率逆变器把直流电转换回固定频率的交流电,并供应给主汇流条。 - 交流-交流变频器(cycloconverter)拓扑,没有中间直流转换步骤:
![image]()
飞机发动机提供变速的旋转动力;
发电机从发动机接收旋转动力,产生频率可变的交流电;
交-交变频器直接把发电机输出的可变频率交流电,转化为目标固定频率的交流电。



总结:电气电源系统模型
一个典型的EPS可以包括:
- 励磁控制同步发电机;
- 发电机控制单元;
- dq0到abc模型转换,把三相交流电转换到dq坐标系下的直流量;
- 变压整流单元,获得28V直流电压;
- 连接在变压整流单元输出端的直流负载;
- 连接在变压器输出端的交流负载。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号