
L5.1 押题
L5.1 押题
前言
我不到啊。
题目
综合论述题
请根据本课程所学关于《设计、创新、系统级分析与技术路线规划》的知识,回答以下问题:
1. 系统建模基础: 请解释“对象 (Object)”、“语境 (Context)”和“需求 (Requirements)”这三个概念在航空航天系统设计(例如,设计一颗对地观测卫星)中的核心作用及其相互关系。
进一步说明,在对该卫星的姿态与轨道控制系统 (AOCS - Attitude and Orbit Control System) 进行系统建模时,你会如何运用“组件 (Components)”分解和“网络拓扑 (Network Topology)”描述其结构?
最后,简述在此过程中,“系统分析 (System Analysis)”方法起到了怎样的作用?
2. 设计、创新与创造力: 讲义提到“设计的根本目的始终是通过设计对象作为操控手段/装置,间接地操纵/影响系统状态”。
请结合“设计自由度 (dDOFs)”和“物理自由度 (pDOFs)”的概念,阐述这句话的含义,并以飞机飞行控制为例进行说明。在追求航空航天领域的“创新”(比如,研发可重复使用运载火箭)时,为何“创造力”定义中提到的“充分性 (Sufficiency)”(即避免设计固着)尤为重要?
试举例说明“系统性探索发现 (Systematic Exploration)”中的某种方法(如形态分析法或TRIZ)如何帮助实现这种“充分性”。
3. 多目标决策与权衡: 航空航天产品设计往往需要在多个冲突目标(如最大化有效载荷质量、最小化发射成本、最大化在轨寿命、最小化系统风险)之间取得平衡。
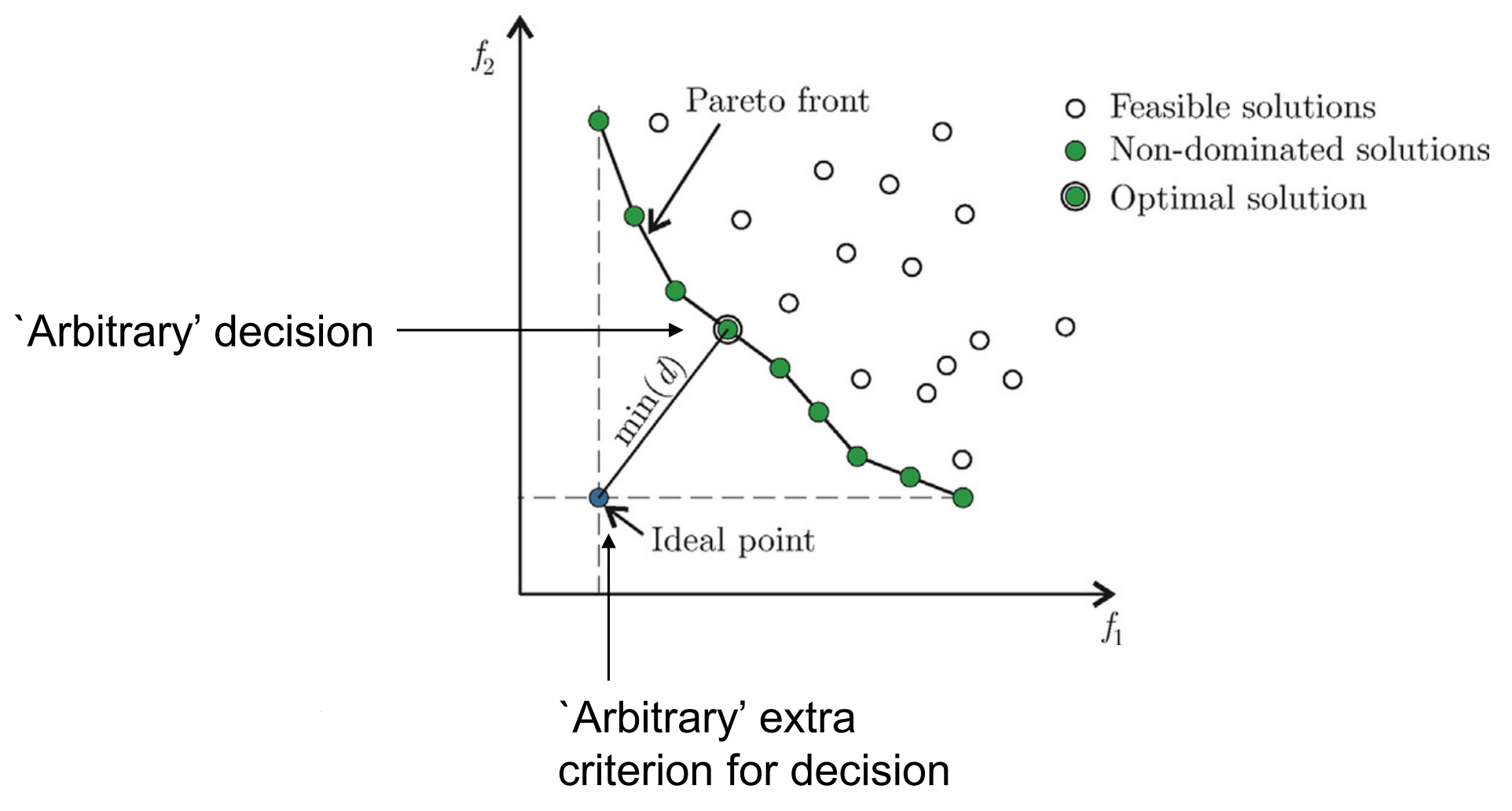
请解释什么是“帕累托前沿 (Pareto Front)”(可结合 图1 进行说明),以及为什么它代表了一系列需要设计者或决策者进行“人为取舍 (trade-off)”的“非劣解”集合?
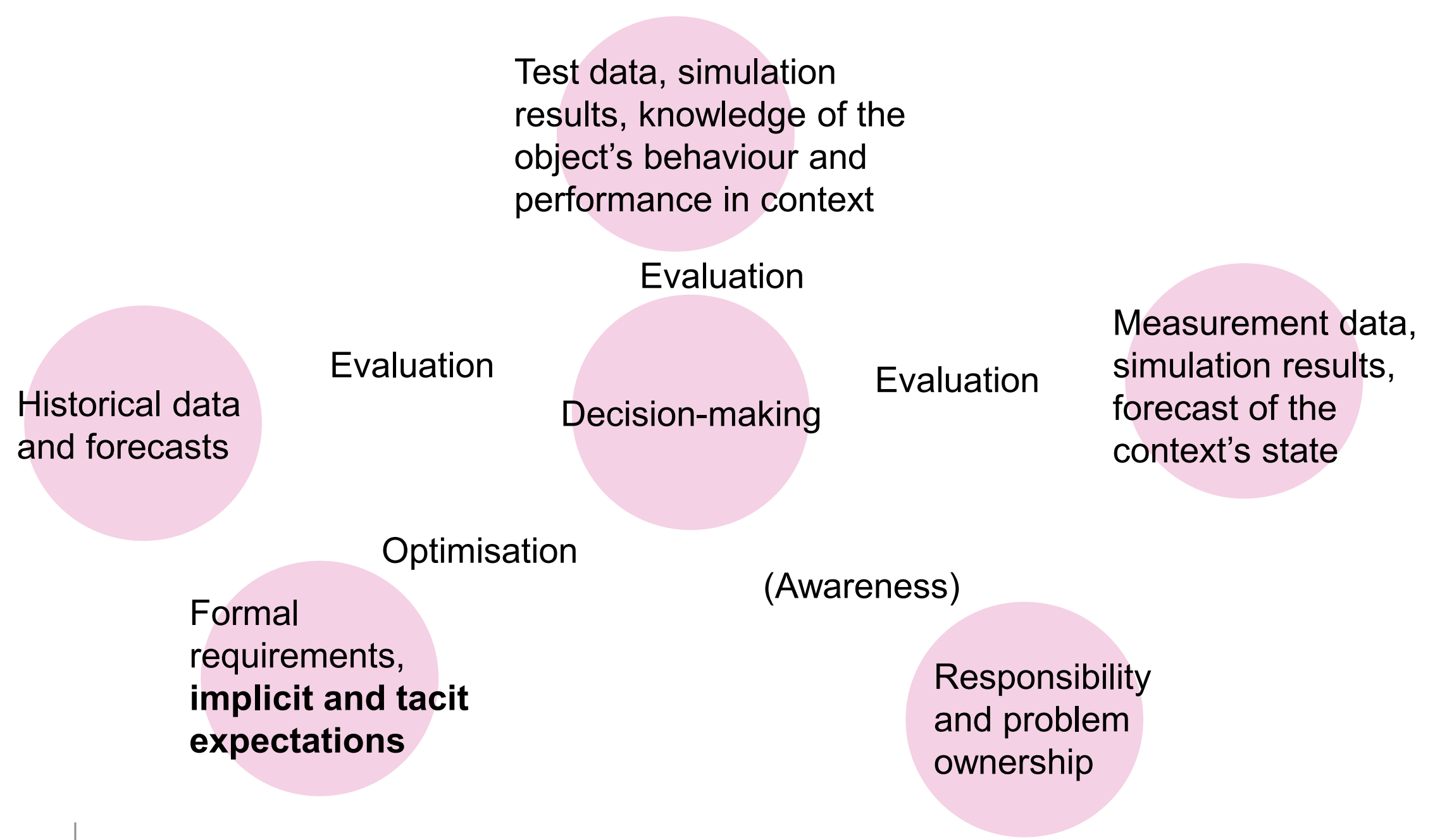
进一步,参考 图2 所揭示的决策制定环境,除了技术指标评估结果外,还有哪些“隐性或显性”因素会影响从帕累托前沿中选择最终设计方案?
4. 战略考量与设计约束: 假设一家拥有先进无人机飞行控制算法“技术专长”(优势S)的公司,计划进入竞争激烈的物流无人机市场。
请结合“技术SWOT分析”中的“机会 (Opportunities)”(如快速增长的电商物流配送需求)和“威胁 (Threats)”(如严格的城市空域管理法规、强大的现有竞争对手),以及“供应链考量”(如对特定高性能GPS/IMU组合导航模块供应商的依赖风险):
讨论这些内外部因素将如何具体地影响该新型物流无人机在“需求 (Requirements)”定义(例如安全性、续航力、载重能力、成本)以及可用“设计自由度 (dDOFs)”(例如气动布局选择、动力系统类型、导航系统配置方案)方面的设定与选择?
答案
1. 系统建模基础 - 答案要点:
-
O-C-R 核心作用与关系:
- 对象 (Object) :明确设计的核心事物,例如对地观测卫星本身或其子系统。
- 语境 (Context) :定义对象运行的环境和条件,如轨道参数、空间环境(辐射、真空、碎片)、地面站网络、发射载具限制、任务操作模式、预算与时间限制等。
- 需求 (Requirements) :连接对象和语境的桥梁,规定对象在给定语境下必须具备的属性或行为,如观测分辨率、数据传输速率、指向精度、在轨寿命、抗辐射能力、成本上限等。三者相互依存,语境决定了需求的合理性,需求驱动了对象的设计。
-
AOCS 组件分解与拓扑:
- 组件 (Components) :可将AOCS分解为传感器组件(如星敏感器、陀螺仪、GPS接收机)、控制器组件(中央计算机及控制软件)、执行器组件(如反作用轮、磁力矩器、推进器)、以及相应的结构和电源接口等。
- 网络拓扑 (Network Topology) :描述这些组件间的连接关系。例如,传感器通过数据总线(如CAN, SpaceWire)将测量数据传输给控制器;控制器处理信息后,通过指令接口将命令发送给执行器;执行器作用于卫星本体(物理连接/力学作用);所有组件通过电源线束连接到电源分系统。这些连接构成了信息流、指令流和能量流的网络。
-
系统分析的作用:
- 系统分析是识别上述对象、语境、需求、组件和拓扑结构的过程。它帮助我们理解系统的边界、功能、组成部分及其相互作用关系,是建立系统模型(数学模型、仿真模型等)的前提。通过系统分析,可以明确接口定义、进行功能分配、识别潜在的交互问题,为后续的详细设计、评估和验证打下基础。
2. 设计、创新与创造力 - 答案要点:
-
设计目的与DOF:
- “设计对象”上的可控参数或选择即为“设计自由度 (dDOFs)”(如飞机舵面的偏转角度、发动机油门大小、机翼形状参数)。
- 这些dDOF的选择和改变会直接或间接地影响系统的整体“状态或行为”,即“物理自由度 (pDOFs)”(如飞机的姿态角、速度、高度、航迹)。
- 因此,设计的根本目的就是通过明智地选择和调整dDOFs,来间接“操纵”pDOFs,使其达到期望的状态,满足飞行任务需求。例如,飞行员或自动驾驶仪通过操纵舵面(dDOF),改变作用在飞机上的气动力和力矩,从而控制飞机的滚转、俯仰和偏航运动(pDOF)。
-
创新中“充分性”的重要性:
- 在航空航天领域追求创新(如可重复使用火箭)意味着要挑战现有技术范式,解决前所未有的问题。
- “充分性”要求设计团队探索足够广泛的设计空间,考虑多种可能性,而不是仅仅停留在对现有技术的渐进式改进上。这对于打破思维定势,找到革命性的解决方案至关重要。如果团队过早地固守在传统的“一次性使用”火箭的设计思路框架内进行优化,就可能永远无法构想出如SpaceX那样的垂直回收方案。
-
系统性探索方法:
- 形态分析法 (Morphological Analysis) :将复杂问题分解为若干关键功能或子系统,为每个功能列出所有可能的实现方式(形态),然后系统地组合这些形态,生成大量潜在的整体解决方案。例如,设计火箭回收方案时,可以分解为“减速方式”(降落伞、反推发动机、气动减速)、“着陆方式”(海上平台、陆地支架、空中回收)、“控制方式”(栅格舵、姿态喷流)等功能,然后组合探索。
- TRIZ:通过识别和解决系统中的技术矛盾(如火箭要结构轻才能载荷大,又要结构强才能承受回收应力),运用其40个发明原理(如“嵌套”、“动态性”、“自服务”)等工具,系统性地启发创新解决方案。例如,“自服务”原理可能启发利用剩余燃料进行反推着陆减速。这些方法强制设计者跳出固有思维,系统性地扫描可能性,有助于避免设计固着,实现“充分性”。
3. 多目标决策与权衡 - 答案要点:
-
帕累托前沿与取舍:
- 帕累托前沿 (Pareto Front) :在多目标优化问题中(如图1所示,f1和f2为两个目标),帕累托前沿是由所有“非劣解 (non-dominated solutions)”(图中绿色点)构成的集合。这些解的特性是:对于前沿上的任何一个解,都无法找到另一个可行解能在不牺牲至少一个目标的情况下,同时改善另一个或多个目标。
- 需要取舍:因为它代表了一系列最优的权衡 (trade-off) 方案。例如,前沿上的A点可能载荷质量高、成本也高,B点可能载荷质量稍低、但成本显著降低。没有哪个点在所有目标上都绝对最好(除非达到通常不可及的“理想点”)。因此,决策者必须根据具体项目的优先级,在这些同样“最优”的选项中做出选择,即进行人为取舍。
-
影响决策的其他因素 (参考 图2) :
-
除了帕累托前沿本身提供的技术指标权衡信息(这通常来自于仿真、测试等评估 Evaluation 结果),最终决策还会受到多种因素影响:
- 正式需求 (Formal requirements) :是否有硬性规定(如成本不得超过X,寿命必须达到Y年)会直接筛掉前沿上的部分解。
- 隐性与默示的预期 (Implicit and tacit expectations) :可能来自公司战略(如更看重市场响应速度而非极致性能)、项目负责人的风险偏好(倾向于选择更成熟、风险更低的方案)、客户未明确表达但能感受到的偏好、或者是组织文化等。
- 历史数据与预测 (Historical data and forecasts) :对市场趋势、技术发展、成本变化的预测可能影响决策者对不同方案未来潜力的判断。
- 背景环境状态的预测 (Forecast of the context's state) :例如,对未来空间碎片环境的预测可能影响对轨道设计或防护设计的偏好。
- 责任与问题所有权 (Responsibility and problem ownership) :决策者承担的责任以及他们对问题的理解深度也会影响其决策倾向。
-
4. 战略考量与设计约束 - 答案要点:
-
机会 (O) 对需求和dDOF的影响:
- 需求 (Requirements) :快速增长的电商物流需求(O)可能转化为对无人机的高载重能力、长续航里程、高可靠性(满足商业运营)、低运营成本(经济性)以及快速部署能力的新需求。城市空中交通(UAM)场景则会增加极其严格的噪声限制和安全冗余需求(如动力系统、导航系统、避障系统的多重冗余)。
- 设计自由度 (dDOFs) :这些新需求会影响dDOF的选择空间。例如,长续航需求可能推动探索混合动力或氢燃料电池(新的dDOF选项),而不仅仅是锂电池;高载重要求会影响对机体结构材料(复合材料比例、结构形式)、气动布局(翼型、翼面积)的选择;UAM的噪声和安全需求则可能使某些高效但嘈杂的螺旋桨设计(dDOF)变得不可行,并强制要求采用特定的冗余架构(限制了dDOF的选择)。
-
威胁 (T) 对需求和dDOF的影响:
- 需求 (Requirements) :严格的城市空域管理法规(T)会直接转化为对无人机通信、导航、监视能力以及满足特定飞行规则(如地理围栏、高度限制)的强制性需求。竞争对手的技术颠覆(T)(如推出飞行效率更高或成本更低的产品)可能迫使公司提高自身产品的性能需求(如续航、速度)或降低成本需求以保持竞争力。
- 设计自由度 (dDOFs) :法规(T)可能限制某些dDOF的选择,例如禁止使用某些频段的通信设备,或者强制要求安装特定的ADS-B应答机。竞争压力(T)可能迫使公司在dDOF选择上更加激进,例如采用尚未完全成熟但潜力巨大的新构型或技术,但也可能因为需要快速响应市场而被迫选择更保守、开发周期更短的技术方案(限制了探索新dDOF的时间)。
-
供应链风险 (Supply Chain Risk) 对需求和dDOF的影响:
- 需求 (Requirements) :对特定高性能GPS/IMU模块供应商的依赖风险(SC Risk)可能导致产生新的需求,例如要求导航系统具备一定的自主性以应对GPS信号丢失或干扰,或者要求系统设计能兼容来自不同供应商的替代模块(增加互换性需求)。
- 设计自由度 (dDOFs) :这种风险可能限制dDOF的选择,例如,如果该特定模块性能超群且不可替代,设计者可能必须围绕它进行设计,牺牲掉一些原本可以探索的其他导航架构(dDOF)。或者,为了规避风险,设计者可能被迫选择性能稍差但供应更可靠、来源更多样化的导航模块(改变了dDOF的选择集),甚至投入额外资源进行替代方案的研发(影响项目范围和成本)。
总结:外部的机遇、威胁和供应链的稳定性,会深刻地塑造新产品的目标(需求)和实现这些目标的手段(可用的设计自由度),要求企业在制定技术路线和进行具体设计决策时,必须将这些战略层面的因素充分考虑在内。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号