opencv 取得红色箭头所指示区域的图像信息
- 问题
根据图片中红色标签的指示,取得箭头前方小范围区域的图像信息
- 思路与优化:
1.图片转HSV格式,应用高斯模糊,去除部分噪音
2.给出HSV颜色范围,通过inRange(),去除非目标颜色(目标颜色保留,其他均置0,黑色),得到mask
3.对mask进行二值化操作得到二值图像,此时二值图的白色区域是目标对象,黑色区域是背景
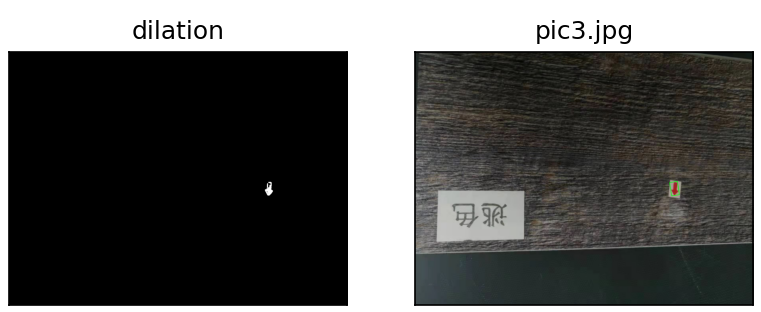
4.因红色标签内部常常有点状黑色噪音,对二值图像应用形态变换-扩张,扩张(膨胀):内核下至少一个像素为1,则像素元素为1,它增加了图像中的白色区域或前景对象的大小
5.获取图像轮廓,去除轮廓面积小于预设值(这里用了300)的轮廓,为合格的轮廓计算边界旋转矩形,即定位框
6.绘制定位框
- 单个处理的代码


import numpy as np import cv2 as cv from matplotlib import pyplot as plt def RGB_inv(image): #反转BR颜色通道 b = image[:,:,0].copy() r = image[:,:,2].copy() image[:,:,0] = r image[:,:,2] = b #读取图像 img = cv.imread("Pic\pic3.jpg") img = cv.GaussianBlur (img,(5,5),0) #将图像转化为HSV格式 hsv = cv.cvtColor(img, cv.COLOR_BGR2HSV) #设定颜色HSV范围,设为红色 low_red= np.array([0,100,100]) upper_red = np.array([10,255,255]) #去除颜色范围外的其余颜色 mask = cv.inRange(hsv, low_red, upper_red) # 二值化操作 ret, binary = cv.threshold(mask, 0, 255, cv.THRESH_BINARY) #形态变换-扩张 kernel = np.ones((5, 5), np.uint8) dilation = cv.dilate(binary,kernel,iterations = 1) plt.subplot(121) plt.imshow(dilation,'gray') plt.title('dilation') plt.xticks([]),plt.yticks([]) #获取图像轮廓坐标,其中contours为坐标值,此处只检测外形轮廓 contours, hierarchy = cv.findContours(dilation, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE) print(len(contours)) if len(contours) > 0: rects = [cv.minAreaRect (c) for c in contours if cv.contourArea(c) >300] boxs = [np.int0(cv.boxPoints (rect) )for rect in rects] cv.drawContours (img,boxs,-1,(0,255,0),2) #将绘制的图像保存并展示 RGB_inv(img) plt.subplot(122) plt.imshow(img,'gray') plt.title('pic3.jpg') plt.xticks([]),plt.yticks([]) plt.show() k = cv.waitKey(0) if k == ord("s"): cv.imwrite("x.jpg", img)#图像另存为
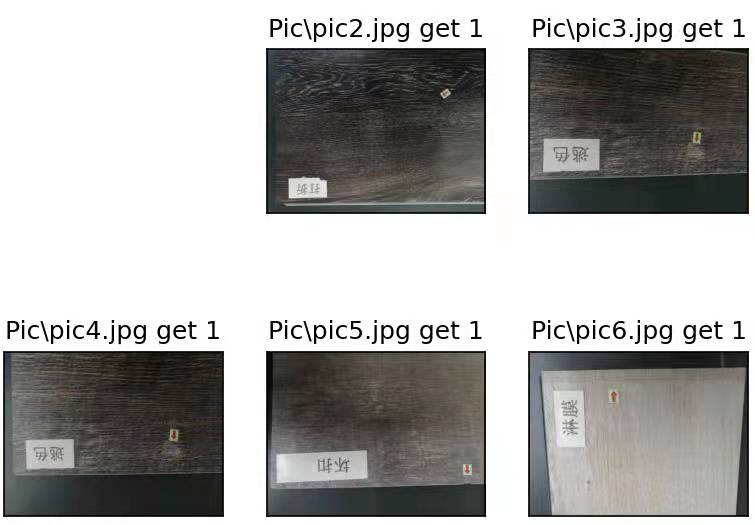
- 批量处理的代码
import numpy as np import cv2 as cv from matplotlib import pyplot as plt def RGB_inv(image): b = image[:,:,0].copy() r = image[:,:,2].copy() image[:,:,0] = r image[:,:,2] = b def handle(img_path,i): img = cv.imread(img_path) img = cv.GaussianBlur (img,(5,5),0) #将图像转化为HSV格式 hsv = cv.cvtColor(img, cv.COLOR_BGR2HSV) #设定颜色HSV范围,设为红色 low_red= np.array([0,100,100]) upper_red = np.array([10,255,255]) #去除颜色范围外的其余颜色 mask = cv.inRange(hsv, low_red, upper_red) # 二值化操作 ret, binary = cv.threshold(mask, 0, 255, cv.THRESH_BINARY) #形态变换 kernel = np.ones((5, 5), np.uint8) dilation = cv.dilate(binary,kernel,iterations = 1) #获取图像轮廓坐标,其中contours为坐标值,此处只检测外形轮廓 contours, hierarchy = cv.findContours(dilation, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE) print(img_path+" get "+str(len(contours))+" cnt") if len(contours) > 0: rects = [cv.minAreaRect (c) for c in contours if cv.contourArea(c) >300] print(img_path+" remain "+str(len(rects))+" cnt") boxs = [np.int0(cv.boxPoints (rect) )for rect in rects] cv.drawContours (img,boxs,-1,(0,255,0),2) #将绘制的图像保存并展示 RGB_inv(img) plt.subplot(2,3,i) plt.imshow(img,'gray') plt.title(img_path+" get "+str(len(rects))) plt.xticks([]),plt.yticks([]) #读取图像 n = 1 for i in range(19,23): handle("Pic\pic"+str(i)+".jpg",n) n += 1 plt.show()
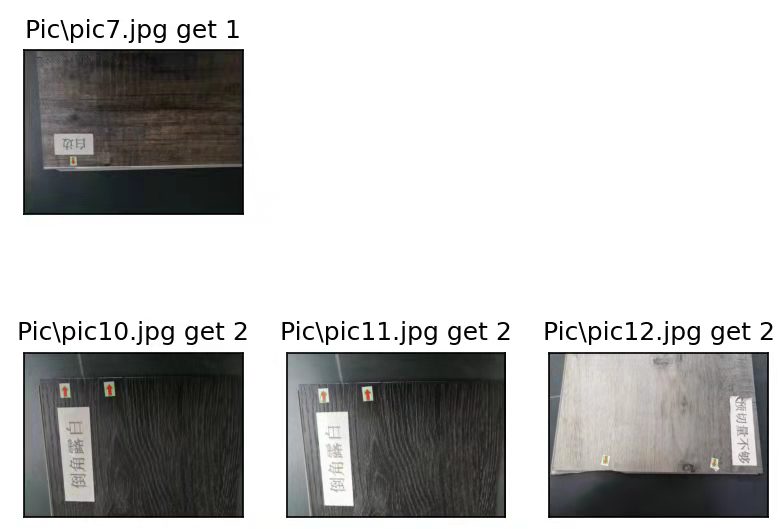
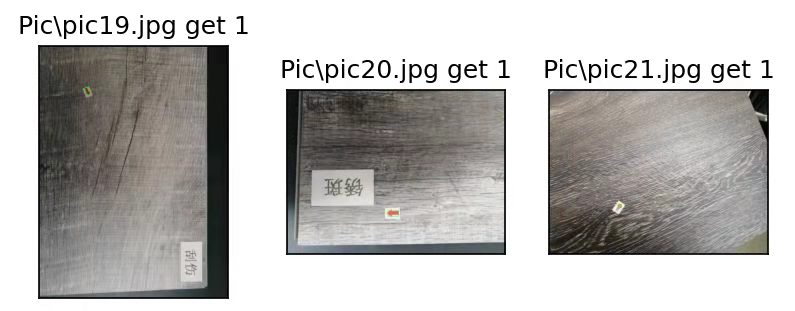
批量处理的效果
- 待解决的问题
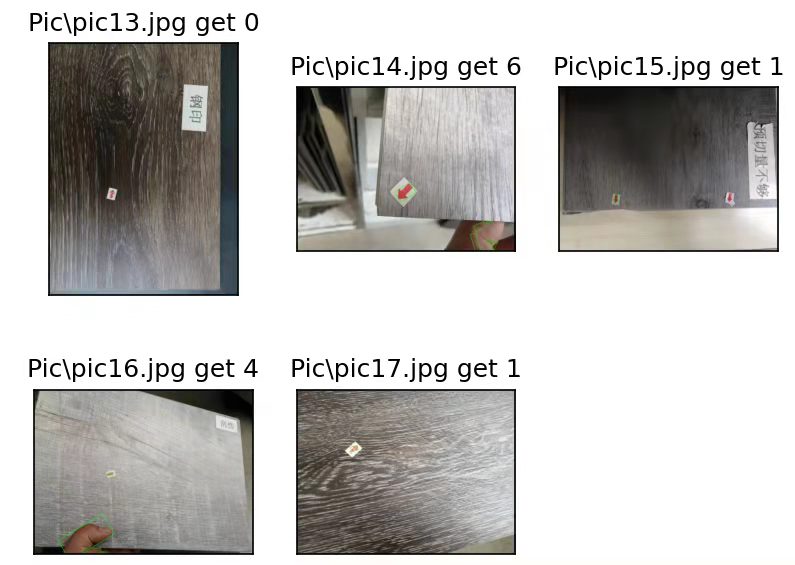
1.目前针对红色划定的HSV颜色范围,不适用于所有的图片,部分图片通过当前参数的inRange()过滤后,仅留下黑色
目前的颜色范围还会留下误拍摄进的手掌区域
2.定位框不能全部都准确地框住红色箭头标签本身,有的只框住了部分,有的不能与箭头长边平行,倾斜放置,
但我们的最终目标是找到箭头指示的区域,所以定位框的问题不是非解决不可
3.确定箭头轮廓的中心,根据箭头轮廓的凸起,确定向量;
对箭头轮廓做一条拟合线,
从中心出发,依照向量,沿拟合线前进一定距离作为圆心,取设定半径画圆,取得图像信息

 浙公网安备 33010602011771号
浙公网安备 33010602011771号