数据结构与算法三 - 二叉搜索树
1 概述
二叉搜索树,顾名思义,其主要目的用于搜索,它是二叉树结构中最基本的一种数据结构,是后续理解B树、B+树、红黑树的基础,后三者在具体的工程实践中更常用,比如C++中STL就是利用红黑树做Map,B树用于磁盘上的数据库维护等,后三者均是在二叉搜索树的基础上演变而来的,理解二叉搜索树是学习后者的基础。
与基础的数据结构如链表、堆、栈等基本结构一样,学习二叉搜索树的关键是深入理解访问与操作二叉树的算法及性能分析,本文如下部分首先介绍二叉搜索树的特征;然后重点介绍二叉搜索树的遍历、查找(包括最值查找、前驱后继查找)、以及插入和删除等操作,最后简单进行分析。
2 二叉搜索树的定义及操作
二叉树很简单,表示每个节点最多有两个子节点,二叉搜索树则更作了更近一步的要求,其必须满足如下性质:
设x为二叉搜索树中的一个节点,如果y是x左子树的一个节点(注:不是直接子节点,是左子树的所有节点),则y.key <= x.key;如果y是x右子树的一个节点,则y.key >= x.key
分析:二叉树本身具有固定的结构,上述规定对二叉树中节点之间的关系进行限制,即赋予了二叉树特定的语义,只要满足二叉树的这种语义,就可以直接根据二叉树结构特征更高效地进行查询搜索等操作
如下图1所示:
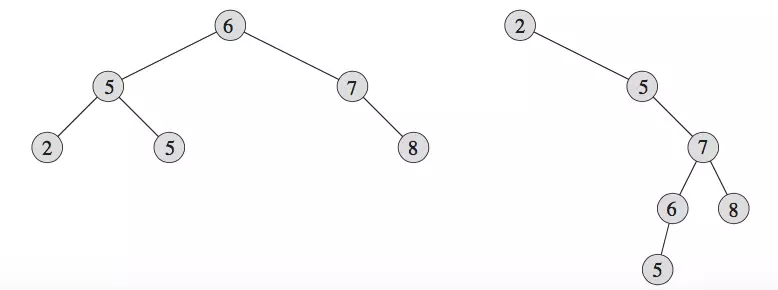
图1: 二叉搜索树例子
2.1 二叉搜索树的遍历
树的遍历有三种:先序遍历、中序遍历、后序遍历。
- 先序遍历:先访问当前节点x,再访问x的左子树x.left,最后访问x的右子树x.right
- 中序遍历:先访问当前节点x的左子树x.left, 再访问当前节点x, 最后访问x的右子树x.right
- 后序遍历:先访问当前节点x的左子树x.left, 再访问当前节点的右子树x.right, 最后访问x
中序遍历的递归算法如下:
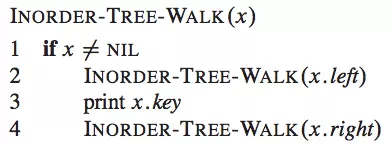
遍历二叉搜索树其实就是遍历二叉树,因为根本就没有用到二叉搜索树的特性。不过,根据二叉搜索树的特性,中序遍历得到的就是从小到大排序的结果。如果用递归算法完成遍历,其时间复杂度为:O(n)
分析:假设遍历二叉搜索树时间为T(n),递归遍历无非就是每个节点访问一次,因此T(n) >= kn,这里k是访问每个节点的时间常数,n为二叉搜索树节点数;递归需要入栈出栈,其时间为一个常数设为d,二叉搜索树最多有n颗子树,因此,kn <= T(n) <= kn + dn = (k+d)n,证明完毕。
2.2 二叉搜索树的查询
对于一个具有n个节点的二叉树,搜索其中某个节点x的算法的时间复杂度为O(n),因为是n个无序节点...。而对于二叉搜索树BST,根据它的特性,其本质是一颗已排好序的节点序列,若要查找的节点元素z, 则从BST的根节点root开始查找,其算法为:
算法的时间复杂度为O(h),h为二叉搜索树的高度。分析:搜索时间取决于算法中比较的次数,而比较的次数由二叉搜索树的高度决定。(近一步分析,如果二叉搜索树的各子树极度不平衡,最坏情况是退化为一个链表或向量,则Search的时间复杂度为O(n);如果二叉搜索树的各子树极度平衡,则其高度为h = O(logn),h值此时最小,这就涉及到本文开头提到的其它树结构了)
与一般二叉树不同,二叉搜索树因为本身已经是有序的,所以,它还提供了查找最大值、查找最小值、查找某个元素x的前驱和查找某个元素x的后继等,这里x的前驱表示二叉搜索树中刚好比x小的数z,即在(x, z)范围内的其它数据不在二叉搜索树中,后继的意思与此类似。
观察图1中的例子,可以发现:
规律1(最小值):树T(假设其根节点为t),如果T没有左子树,则t为子树T的最小值节点;如果有左子树L,则L的最小值节点为T的最小值节点。其算法如下所示:
Min(t){ if t == nil return nil; if t.left == nil return t; return Min(t.left) }
Min函数的时间复杂度为O(h),h为二叉搜索树的高度。
规律2(最大值): 树T(假设其根节点为t),如果T没有右子树,则t为子树T的最大值节点;如果有右子树R,则R的最大值节点为T的最大值节点。其算法为:
Max(t){ if t == nil return nil; if t.right == nil return t; return Max(t.right) }
Max函数的时间复杂度为O(h)
规律3(前驱):树T中查找节点x的前驱,如果x是T的最左子节点,则没有前驱,如图1左的值为2的节点;如果x有左子树L,则L的最大值为x的前驱(利用规律2求);如果x没有左子树,这个情况稍显复杂,假设x的父节点为p,若x为p的右子树,则p为x的前驱,如图1中右图中值为8的节点,其前驱为7的节点, 若x为p的左子树(即p节点的值比x的大),则继续按照x与p的逻辑向上寻找p的父节点p',直到p为p'的右节点,则p'为x的前驱,如图3右图最下面的值为5的节点的前驱为值为3的节点。
其算法为:图3: 二叉搜索树示例
Predecessor(t, x){ if Min(t) is x or x is nil return nil; if x.left return Max(x.left); p = x.parent; while p.right != x { x = p; p = p.parent } return p }
Predecessor算法的时间复杂度取决于Max的复杂度或while循环次数,而二者都取决于二叉搜索树的高度,所以Predecessor的时间复杂度为O(h)。

规律4(后继):树T中查找节点x的后继,若x为其最有最右子节点,则x没有后继;如果x有右子树R,则R的最小值为x的后继(利用规律1求);如果x没有右子树,假设x的父节点为p,若x为p的左子树根节点,则p为x的后继,如图3中值为6的节点的后继为值为7的节点,若x为p的右子树根节点,按照x与p的逻辑向上寻找p的父节点p',直到p为p'的左节点,则p'为x的后继,如图4中值为9的节点的后继为值是10的节点。
图4: 示例
其算法为:
Successor(t, x){ if Max(t) is x or x is nil return nil; if x.right return Min(x.right); p = x.parent; while p.left != x { x = p; p = p.parent; } return p }
与Predecessor类似,其算法复杂度为O(h)

2.3 节点插入与删除
如果采用二叉搜索树存储数据,增加和删除数据不可避免。与一般的二叉树的插入和删除不同,需要保证二叉搜索树的特性不变。
2.3.1 节点插入
向二叉树中插入节点,首先面临的一个问题是,这个节点应该放在哪里?是作为叶子节点还是作为非叶子节点插入?显然,插入节点作为叶子节点是较为直接和简单的方式,问题是:是否对于任何值的节点都可以作为叶子节点插入???答案是肯定的,如果有兴趣可以证明(证明也比较直接),如果有怀疑,可以尝试在下图5中插入任何数值的节点,验证其二叉搜索树的特性是否成立。

图5:节点插入图示
插入节点的算法为:
Insert(t, x){ while t { // while循环中查找合适的叶节点位置 y = t; if x.key < t.key t = t.left; else t = t.right; } x.parent = y if y == nil t = x; elif x.key < y.key y.left = x; else y.right = x; }
while循环的复杂度决定Insert操作的复杂度,其中的比较次数(即二叉搜索树的高度)决定了Insert的复杂度,因此其复杂度为O(h)
2.3.2 删除节点
与插入节点相比,删除节点会更复杂。删除节点有两种情况:
- 删除叶节点,这种情况较为简单,直接删除不会改变二叉搜索树的特征;
- 删除非叶子节点x。这种情况稍微复杂,又可分为如下几种情况:
-
如果x的左子树或右子树为空,则直接用左子树或右子树代替x即可,如图6中的a和b

图6:示例
- 如果x的左子树L和右子树均R存在,则存在两种删除的思路,一种是在左子树L中寻找最大值节点LMax(LMax比为叶子节点),删除LMax并用LMax代替x即可;另一种思路则是在右子树R中寻找最小值节点RMin(RMin必为叶子节点),删除RMin并用RMin代替x即可。
-

因此,删除节点的算法为:
Delete(t, x) { if t == nil return nil; if x.left == nil and x.right == nil { // 叶子节点的情况 if x == t return nil; } else if x.left != nil and x.right == nil { // 左子树非空的情况 p = x.parent; if x is p.left p.left = x.left; else p.right = x.left; x.left.parent = p; } else if x.right != nil and x.left == nil { // 右子树非空的情况 p = x.parent; if x is p.left p.left = x.right; else p.right = x.right; x.right.parent = p; } else{ //左右子树均为非空的情况 LMax = Max(x.left); // * copy = copyAndSetNode(LMax); // 深度复制一个LMax并对其左右子节点和父节点均赋值为nil t = Delete(t, LMax); p = x.parent; copy.left = x.left; copy.right = x.right; copy.parent = p; if x is p.left p.left = copy; else p.right = copy; } x = nil; return t; }
对于Delete函数,其复杂度由左右子树均为非空情况中的行*决定,其复杂度为O(h).
3 小结
由上面的分析知:二叉搜索树的查询、插入、删除操作的时间复杂度均为O(h)。表面上看,比较理想,但是,h的值由二叉搜索树的形态决定,而二叉搜索树的形态是不确定的,如{1, 3, 5, 7, 9, 11, 13}可以构建出高度为2、3、4、5、6的二叉搜索树,这种不确定性是由于二叉搜索树限定的特征较为宽松造成的。在二叉搜索树上加上其它限定特征,即可构成B树、B+树、红黑树等。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号