

Sobel边缘检测
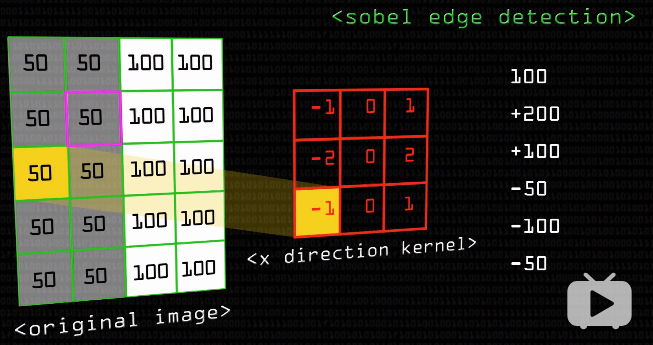
Sobel算子:[-1 0 1
-2 0 2
-1 0 1]
用此算子与原图像做卷积,可以检测出垂直方向的边缘。算子作用在图像的第二列,结果是:200,200,200;作用在第三列,结果是:
200,200,200;
对当前列左右两侧的元素进行差分,由于边缘的值明显小于(或大于)周边像素,所以边缘的差分结果会明显不同,这样就提取出了垂直边缘。同理,把上面那个矩阵转置一下,就是提取水平边缘。这种差分操作就称为图像的梯度计算。
来源:https://www.bilibili.com/video/BV1xE411a7RR?from=search&seid=15672097216059841494
图像梯度
概念: 把图片想象成连续函数,因为边缘部分的像素值是与旁边像素明显有区别的,所以对图片局部求极值,就可以得到整幅图片的边缘信息了。不过图片是二维的离散函数,导数就变成了差分,这个差分就称为图像的梯度。
理解:求一阶差分应该是指对图像相邻像素求取差分。
边缘 – 是像素值发生跃迁的地方(变化率最大处,导数最大处),是图像的显著特征之一,在图像特征提取、对象检测、模式识别等方面都有重要的作用。
Sobel算子和Scharr算子
(1)Sobel算子:是离散微分算子(discrete differentiation operator),用来计算图像灰度的近似梯度,梯度越大越有可能是边缘。
Soble算子的功能集合了高斯平滑和微分求导,又被称为一阶微分算子,求导算子,在水平和垂直两个方向上求导,得到的是图像在X方法与Y方向梯度图像。
缺点:比较敏感,容易受影响,要通过高斯模糊(平滑)来降噪。
算子是通过权重不同来扩大差异。
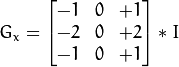
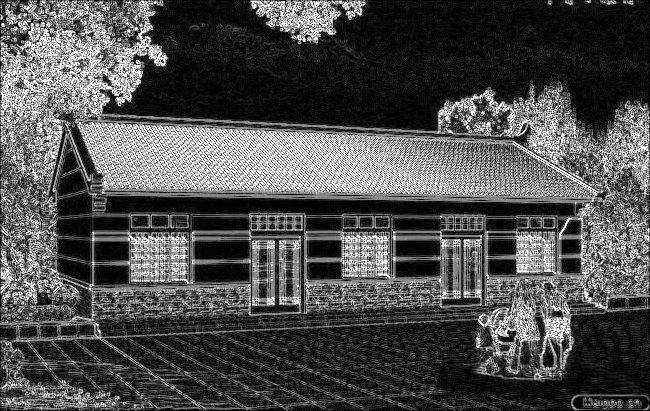
梯度计算:(在两个方向求导,假设被作用图像为 I)
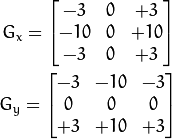
水平变化: 将 I 与一个奇数大小的内核 Gx进行卷积。比如,当内核大小为3时, Gx的计算结果为:
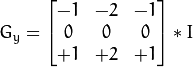
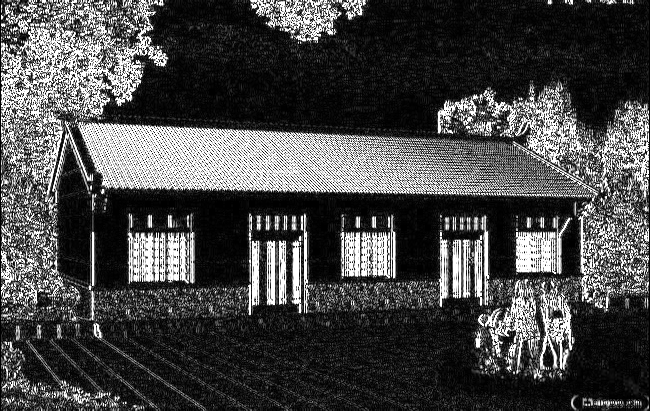
垂直变化: 将 I 与一个奇数大小的内核 Gy进行卷积。比如,当内核大小为3时, Gy的计算结果为:
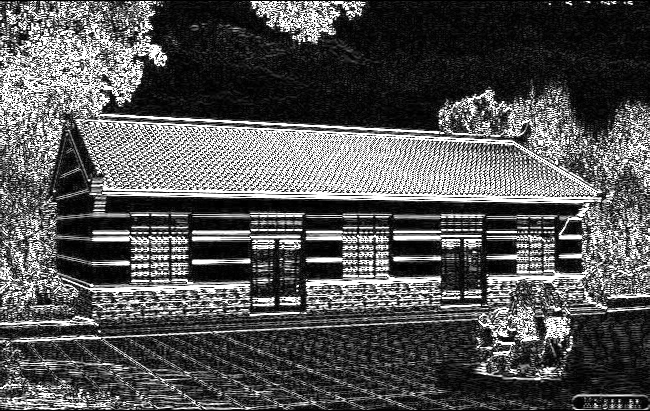
在图像的每一像素上,结合以上两个结果求出近似梯度:
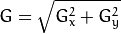
有时也用下面更简单公式代替,计算速度快:(最终图像梯度)。

(2)Scharr:当内核大小为3时, 以上Sobel内核可能产生比较明显的误差(毕竟,Sobel算子只是求取了导数的近似值)。 为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,不怕干扰,其内核为:
(3)Sobel/Scharr提取边缘(求导)步骤:
1)高斯模糊平滑降噪:
GaussianBlur( src, dst, Size(3,3), 0, 0, BORDER_DEFAULT );
2)转灰度:
cvtColor( src, gray, COLOR_RGB2GRAY );
3)求X和Y方向的梯度(求导):
Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);
Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);
Scharr(gray_src, xgrad, CV_16S, 1, 0);
Scharr(gray_src, ygrad, CV_16S, 0, 1);
4)像素取绝对值:
convertScaleAbs(A, B); //计算图像A的像素绝对值,输出到图像B

5)相加X和Y,得到综合梯度,称为振幅图像:
addWeighted( A, 0.5,B, 0.5, 0, AB); //混合权重相加,效果较差
或者循环获取像素,每个点直接相加,效果更好。
来源:https://zhuanlan.zhihu.com/p/50966625
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部加权平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于象素的位置的影响做了加权。
Sobel算子包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
Sobel算子是典型的基于一阶导数的边缘检测算子,是离散型的差分算子。该算子对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于像素的位置的影响做了加权,与Prewitt算子、Roberts算子相比因此效果更好。
Sobel算子包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
import cv2 import numpy as np img = cv2.imread("fengjing.jpg", 0) x = cv2.Sobel(img,cv2.CV_16S,1,0) #1,0代表只计算x方向计算边缘 y = cv2.Sobel(img,cv2.CV_16S,0,1) #0,1代表只在y方向计算边缘 absX = cv2.convertScaleAbs(x) absY = cv2.convertScaleAbs(y) dst = cv2.addWeighted(absX,0.5,absY,0.5,0) cv2.imshow("absX", absX) cv2.imshow("absY", absY) cv2.imshow("Result", dst) cv2.waitKey(0) cv2.destroyAllWindows()
测试图片:

运行结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号