


基于时频域霍夫变换的汽车雷达互干扰抑制——论文阅读 - 指南
基于时频域霍夫变换的汽车雷达互干扰抑制
Y. Li, W. Zhang and L. Ji, “Automotive Radar Mutual Interference Mitigation Based on Power-Weighted Hough Transform in the Time-Frequency Domain,” in IEEE Transactions on Vehicular Technology, vol. 74, no. 3, pp. 3854-3869, March 2025, doi: 10.1109/TVT.2024.3489628.
随着高级驾驶辅助框架(ADAS)和自动驾驶技巧的发展,毫米波雷达因其全天候、全天时的工作能力而成为不可或情的传感器。然而,道路上配备雷达的车辆密度迅速增加,导致雷达信号之间的相互干扰挑战日益严重。这种干扰表现为瞬时、高功率的噪声,会严重降低雷达的目标检测性能,增加目标丢失的概率,对驾驶安全构成直接威胁。
:就是本文提出了一种创新的干扰抑制方法,其核心思想目标回波和干扰信号在经过FMCW雷达混频处理(解啁啾)后,在时频(TF)域中具有截然不同的结构特征。该方法利用霍夫变换(一种经典的直线检测技术)来精准识别并定位干扰在时频图上的线性结构,然后通过自回归(AR)模型恢复被干扰区域的有用信号。
核心数学模型:信号、回波与干扰
文章首先建立了线性调频连续波(FMCW)雷达的信号模型,这是理解干扰特性的基础。
1. FMCW发射信号 (st(t)s_t(t)st(t))
FMCW雷达发射的是一种“啁啾”信号,即频率随时间线性变化的信号。其数学表达式为:
st(t)=2Ptcos[2π(fc+12kt)t]s_{t}(t) = \sqrt{2P_{t}}\cos[2\pi(f_{c}+\frac{1}{2}kt)t]st(t)=2Ptcos[2π(fc+21kt)t]
其中,PtP_tPt是发射功率,fcf_cfc是中心载频,kkk是调频斜率,由带宽BBB 和扫描时间 TTT 决定,即 k=B/Tk = B/Tk=B/T。
2. 目标回波信号 (se(t)s_e(t)se(t))
发射信号的延迟版本。电磁波经历了“雷达 -> 目标 -> 雷达”的双程传播,因此其功率就是目标回波PeP_ePe 与距离 RRR 的四次方(1/R41/R^41/R4)成反比。
3. 干扰信号 (si(t)s_i(t)si(t))
干扰信号来自另一部(干扰)雷达,它通常具有不同的中心频率fcif_{ci}fci 和调频斜率 kik_iki。其数学表达式为:
si(t)=2Picos[2πfci(t−τi)+12ki(t−τi)2]s_{i}(t) = \sqrt{2P_{i}}\cos[2\pi f_{ci}(t-\tau_{i})+\frac{1}{2}k_{i}(t-\tau_{i})^{2}]si(t)=2Picos[2πfci(t−τi)+21ki(t−τi)2]
至关重要的是,干扰信号只经历了“干扰雷达 -> 本车雷达”的单程传播,因此其功率PiP_iPi 仅与距离 RiR_iRi 的平方(1/Ri21/R_i^21/Ri2)成反比。
4. 信号干扰比 (SIR)
由于传播路径的差异(1/R41/R^41/R4 vs 1/Ri21/R_i^21/Ri2),干扰信号的功率衰减远慢于目标回波。这导致了极低的信号干扰比(SIR):
SIR=PePi=Ri2σ4πR4SIR = \frac{P_{e}}{P_{i}} = \frac{R_{i}^{2}\sigma}{4\pi R^{4}}SIR=PiPe=4πR4Ri2σ
如论文中的表I所示,一个100米处的干扰源(如另一辆车)产生的干扰功率可能比100米处目标回波的功率强41dB2000米外的干扰源,其干扰功率也可能强就是,即使15dB。这意味着干扰信号的幅度远大于有用信号。
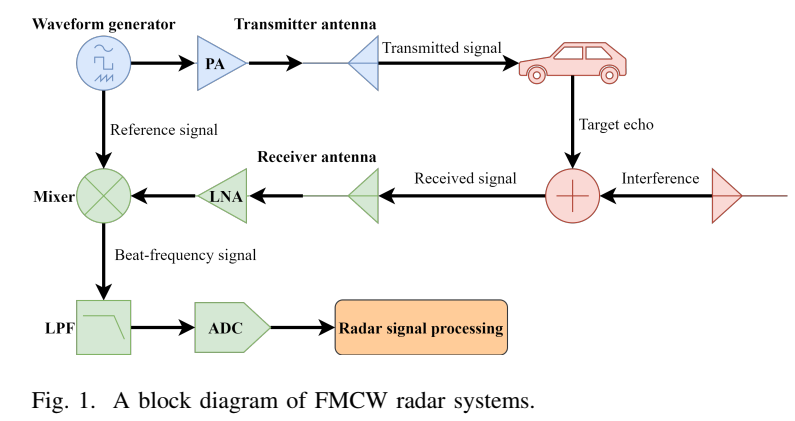
图1展示了FMCW雷达体系的框图,接收信号sr(t)s_r(t)sr(t) 是目标回波 se(t)s_e(t)se(t)、干扰 si(t)s_i(t)si(t) 和噪声 g(t)g(t)g(t) 的总和。
5. 差频信号 (Beat-Frequency Signal)
FMCW雷达的核心处理步骤是“解啁啾”(Dechirp),即将接收信号与本地参考信号(即发射信号st(t)s_t(t)st(t))进行混频,然后通过一个低通滤波器(LPF)。这一步骤产生了关键的差频信号,也揭示了目标与干扰的根本区别:
目标差频 (fbf_bfb):目标回波 se(t)s_e(t)se(t) 与参考信号 st(t)s_t(t)st(t)混频后,由于二者具有相同的调频斜率kkk,它们相减后t2t^2t2项被消除,产生一个恒定频率的信号。这个频率(fbf_bfb)与目标距离成正比:
fb=kτf_{b} = k\taufb=kτ干扰差频 (fbif_{bi}fbi):干扰信号 si(t)s_i(t)si(t) 与参考信号 st(t)s_t(t)st(t)混频后,由于二者的调频斜率不同(k≠kik \neq k_ik=ki),t2t^2t2项无法消除。其差频信号一个LFM信号就是仍然(即线性调频信号),其瞬时频率fbif_{bi}fbi 是时间 ttt的线性函数:
fbi=fc−fci+kiτi+12(k−ki)tf_{bi} = f_{c}-f_{ci}+k_{i}\tau_{i}+\frac{1}{2}(k-k_{i})tfbi=fc−fci+kiτi+21(k−ki)t
图2极好地在视觉上总结了这一核心差异。
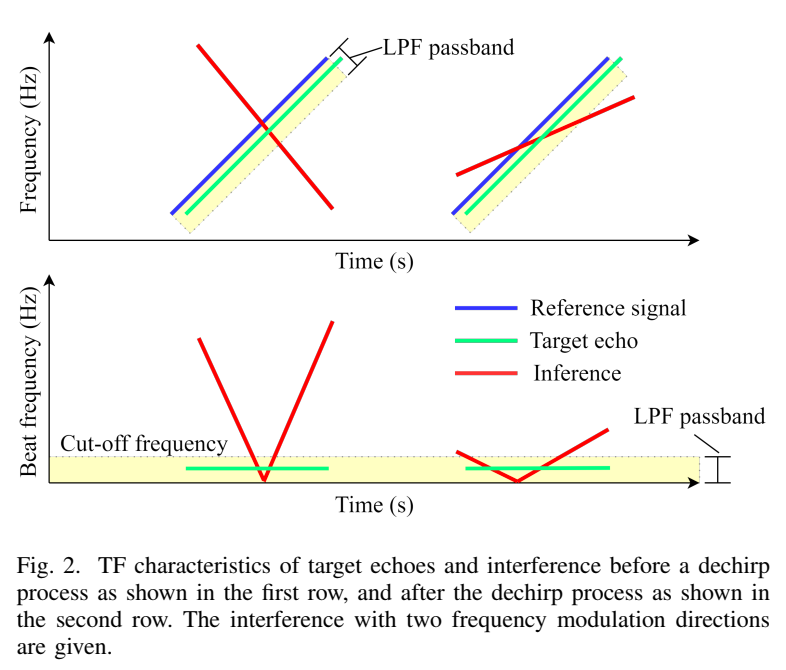
- 上排 (解啁啾前):目标回波和干扰都是倾斜的LFM信号。
- 下排 (解啁啾后):经过混频和LPF(黄色区域),目标回波(绿色) 变成了一条水平直线(恒定频率);而干扰信号(红色) 仍然是一条倾斜的直线(LFM信号),并且由于LPF的滤波,它在时间上是有限的。
论文的核心方法:功率加权霍夫变换与AR恢复
利用上述“目标是水平线,干扰是倾斜线”的关键物理特性,本文设计了一套精巧的干扰抑制流程。
1. 动机分析
现有的干扰检测方法(如基于恒定虚警率CFAR的方法)依赖于干扰的幅度远大于噪声,但在低信噪比(SNR)或弱干扰下性能会急剧下降。
本文的动机是,不应仅仅依赖幅度信息,更应利用干扰在时频域中清晰的结构信息(即直线)。利用在时频域上沿着所有可能的“直线”路径累积能量,即使是淹没在噪声中的微弱干扰直线,也能在其对应的参数空间中“积分”出一个强烈的峰值,从而被鲁棒地检测出来。
2. 步骤1:时频分析 (STFT)
首先,使用短时傅里叶变换(STFT)将接收到的差频信号sr(n)s_r(n)sr(n)转换到时频域,得到时频复矩阵Sr(ζ,m)S_r(\zeta, m)Sr(ζ,m):
Sr(ζ,m)=∑n=−∞∞sr(n)w(n−ζD)e−j2πmNnS_{r}(\zeta,m) = \sum_{n=-\infty}^{\infty}s_{r}(n)w(n-\zeta D)e^{-j2\pi\frac{m}{N}n}Sr(ζ,m)=n=−∞∑∞sr(n)w(n−ζD)e−j2πNmn
其中 w(n)w(n)w(n) 是窗函数,ζ\zetaζ是时间索引,mmm是频率索引。继而,计算其功率谱图P(ζ,m)=∣Sr(ζ,m)∣2P(\zeta,m) = |S_{r}(\zeta,m)|^{2}P(ζ,m)=∣Sr(ζ,m)∣2。这个功率谱图被视为一张“图像”输入到下一步。
3. 步骤2:功率加权霍夫变换 (Power-Weighted Hough Transform)
霍夫变换是图像处理中用于检测直线、圆等形状的经典算法。在标准霍夫变换中,一条直线许可用极坐标参数(ρ,θ)(\rho, \theta)(ρ,θ) 来定义。
本文对经典霍夫变换进行了关键修改,使其“功率加权”。传统的霍夫变换只是对二值图像上的点进行计数,而本文的方法则是对时频功率谱P(ζ,m)P(\zeta,m)P(ζ,m) 上的功率值进行累加。其累加器 HPH_PHP 的定义为:
HP(ρ,θ)=∑(ζ,m)∈PP(ζ,m)δ(ζ,m)H_{P}(\rho,\theta) = \sum_{(\zeta,m)\in P}P(\zeta,m)\delta(\zeta,m)HP(ρ,θ)=(ζ,m)∈P∑P(ζ,m)δ(ζ,m)
这个公式的含义是:对于(ρ,θ)(\rho, \theta)(ρ,θ)定义的每一条可能的直线,将该直线上所有时频单元(ζ,m)(\zeta, m)(ζ,m) 的功率 P(ζ,m)P(\zeta,m)P(ζ,m)相加,得到累积分数HP(ρ,θ)H_P(\rho, \theta)HP(ρ,θ)。通过这种方式,干扰信号的能量在HPH_PHP参数空间中被显著累积,形成了尖锐的峰值,而噪声和目标回波(水平线,θ≈0\theta \approx 0θ≈0通过)则不会。通过检测这些峰值,就能够极其鲁棒地定位出时频域中的干扰直线,即使在低信噪比(SNR)或低干扰噪声比(INR)下也能成功。
4. 步骤3:干扰抑制与AR模型恢复
一旦通过霍夫变换检测到干扰直线的位置,就将这些时频单元的数据视为“污染”并丢弃。
然而,这些被丢弃的单元(“空洞”)中可能也包含有用的目标信号。为了在去除干扰的同时最大限度地保留目标信息,论文使用了自回归(AR)模型进行信号恢复。该模型假设当前时域样本允许由其邻近的样本线性预测得出。对于时频谱中的每一个频率通道mmm,沿着时间轴ζ\zetaζ建立AR模型:
Srec(ζ~,m)=∑ζn=1qΨζnSr(ζ−ζn,m)+ϵS_{rec}(\tilde{\zeta},m) = \sum_{\zeta_{n}=1}^{q}\Psi_{\zeta_{n}}S_{r}(\zeta-\zeta_{n},m)+\epsilonSrec(ζ~,m)=ζn=1∑qΨζnSr(ζ−ζn,m)+ϵ
其中 Ψ\PsiΨ是预测系数。利用干扰区域邻近的“干净”数据估计出Ψ\PsiΨ,然后用它来“插值”填充被挖空的干扰区域,从而恢复出被掩盖的目标信号。最后,将这个“净化”后的时频谱Srec(ζ,m)S_{rec}(\zeta, m)Srec(ζ,m)通过逆STFT(ISTFT)变换回时域srec(n)s_{rec}(n)srec(n),得到无干扰的目标信号。
实验与结果分析
论文通过仿真和真实的硬件实验,将所提方法(Proposed)与七种其他主流方法(包括时域的Zeroing, CW, T-AR, IMAT, Wavelet和时频域的STFT-AR, CFAR-Burg)进行了全面对比。
评估指标
- CS (余弦相似度):衡量恢复信号与原始信号的相似度,越接近1越好。
- EVM (误差向量幅度):衡量恢复信号的失真,越小越好。
- PSLR (峰值旁瓣比) / ISLR (积分旁瓣比):衡量频谱的旁瓣水平,值越低(负得越多)表示干扰抑制得越干净。
1. 仿真实验 (Simulation)
A. 无噪声仿真
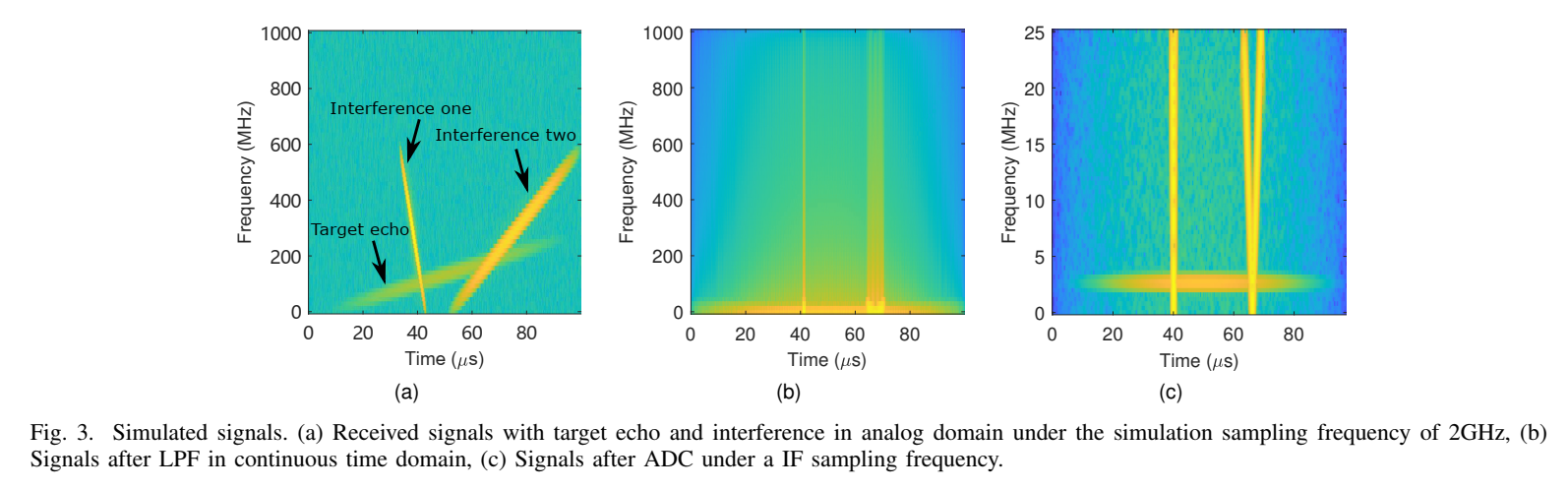
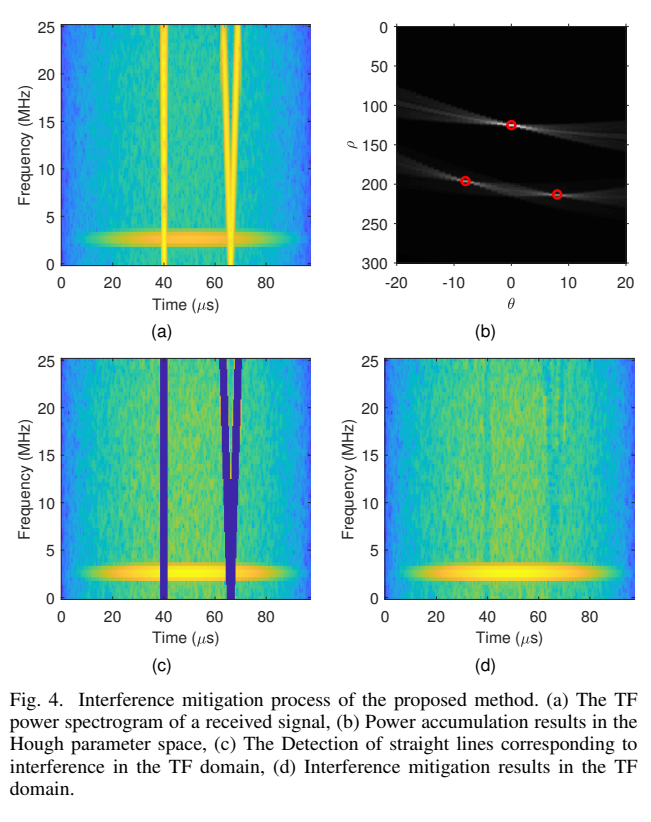
图3展示了仿真的原始信号、LPF输出和ADC采样信号。图4演示了所提技巧的完整流程:(a) 含有干扰(两条倾斜线)和目标(一条水平线)的时频谱;(b) 霍夫参数空间中的功率累积结果,清晰地显示出三个峰值(对应三条干扰线,其中两条在ADC采样后发生了折叠);© 根据峰值检测到的干扰直线;(d) 干扰抑制和AR恢复后的干净时频谱,只留下了目标回波。
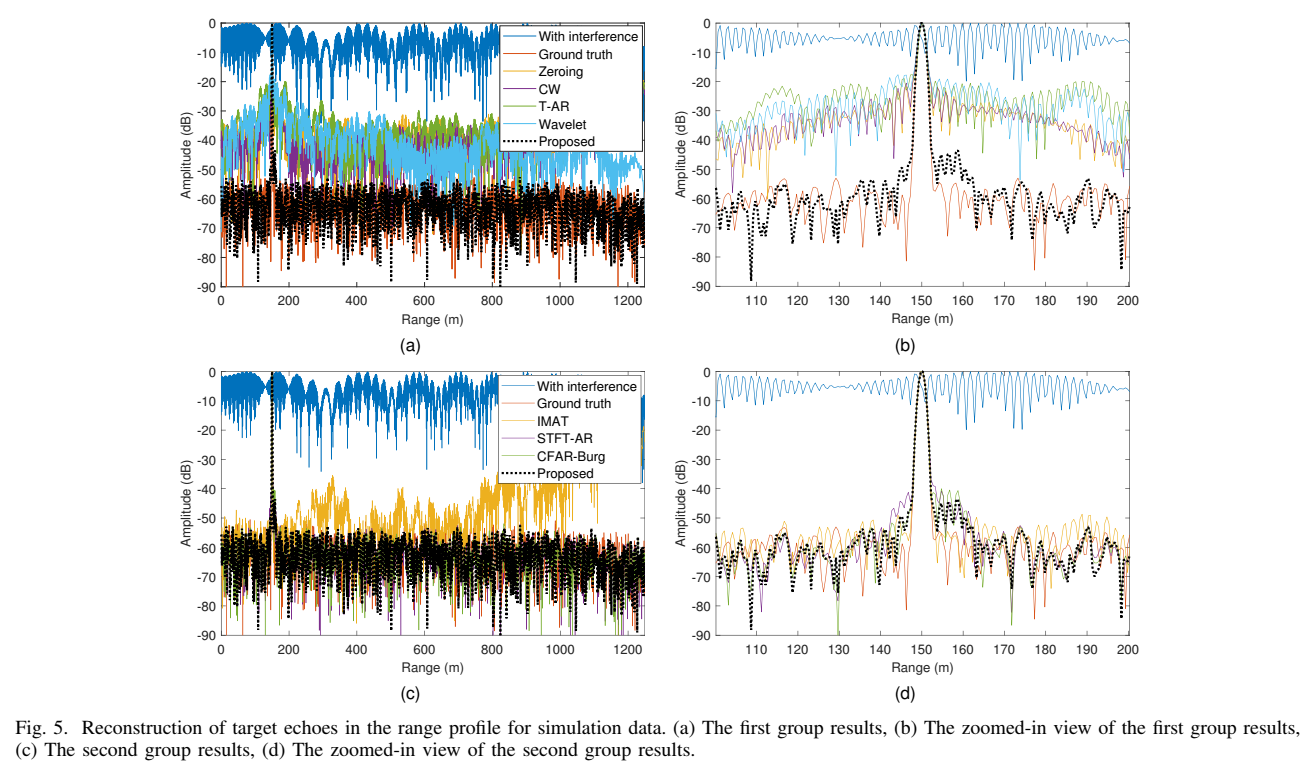
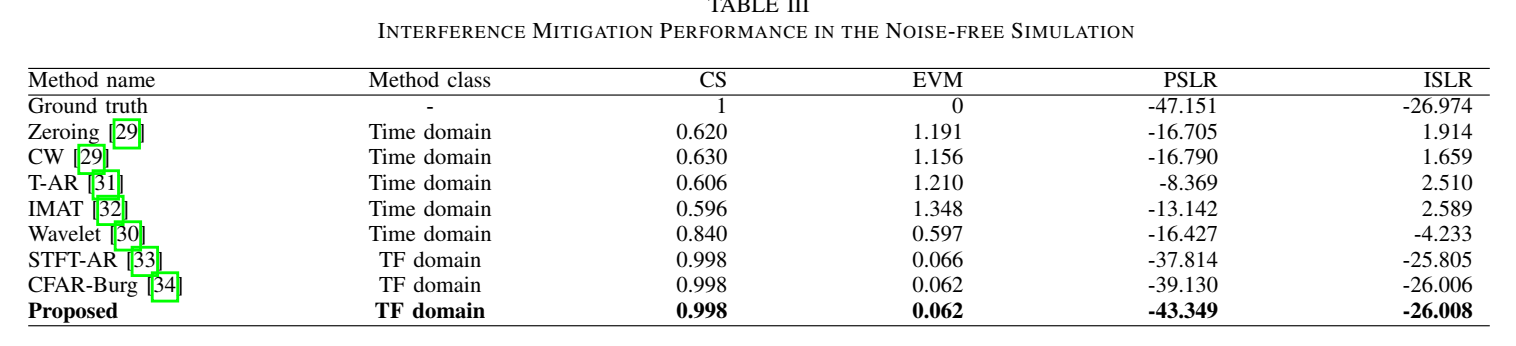
图5对比了各方法在无噪声下的距离剖面。结果显示,时频域方式(STFT-AR, CFAR-Burg, Proposed)的性能远超时域方法。所提方法(Proposed,黑色虚线)的旁瓣最低,几乎与“地面试验”(Ground truth)完美重合。表III的信息表明,所提途径的PSLR达到-43.349 dB,显著优于CFAR-Burg的-39.130 dB。
B. 不同信噪比(SNR)下的鲁棒性测试 (关键对比)
这是最关键的对比。实验模拟了弱干扰(干扰功率与目标功率相同),并在-30dB到10dB的SNR下进行测试。
图6的四张图(CS, EVM, PSLR, ISLR)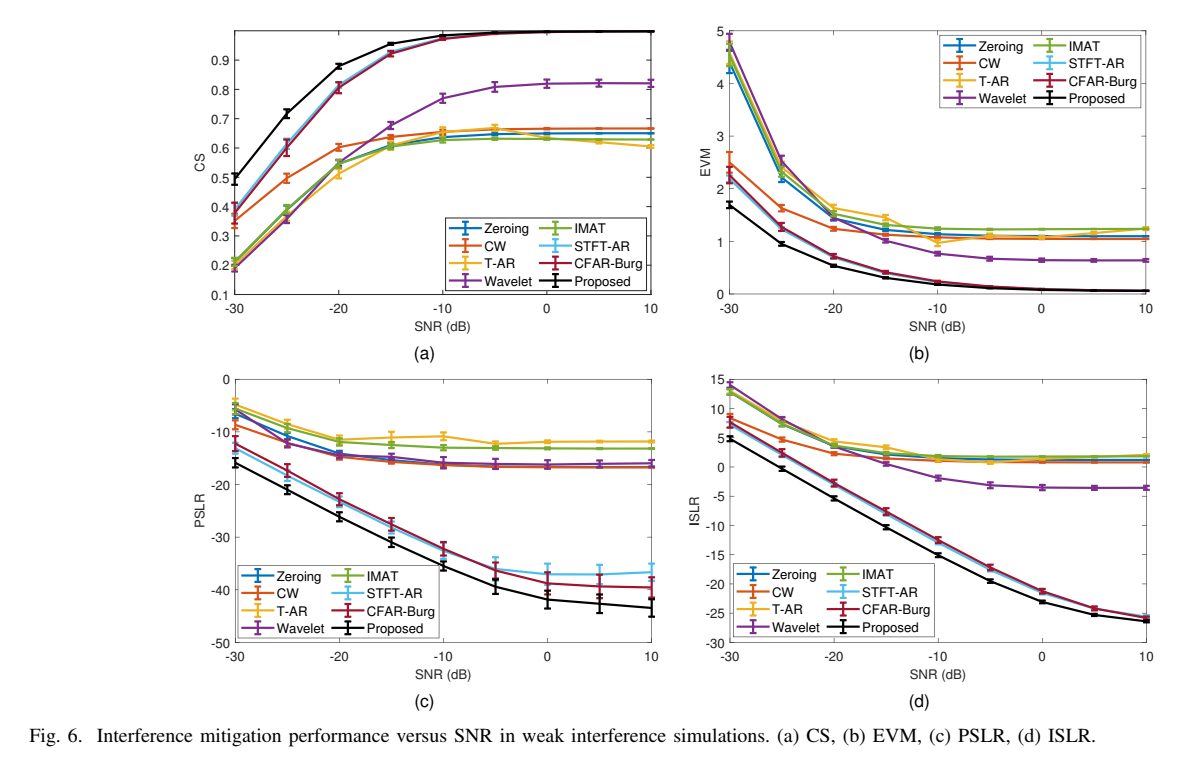
显示:
- 在低SNR(< -15dB)时,所有途径的性能都下降。
- 但STFT-AR和CFAR-Burg技巧的性能是急剧下降。
- 所提方法(紫色线)在极低的SNR下依然保持了出色的性能。例如,在-25dB的SNR下,所提方法的CS(余弦相似度)比其他两种TF方法高出约16% 。
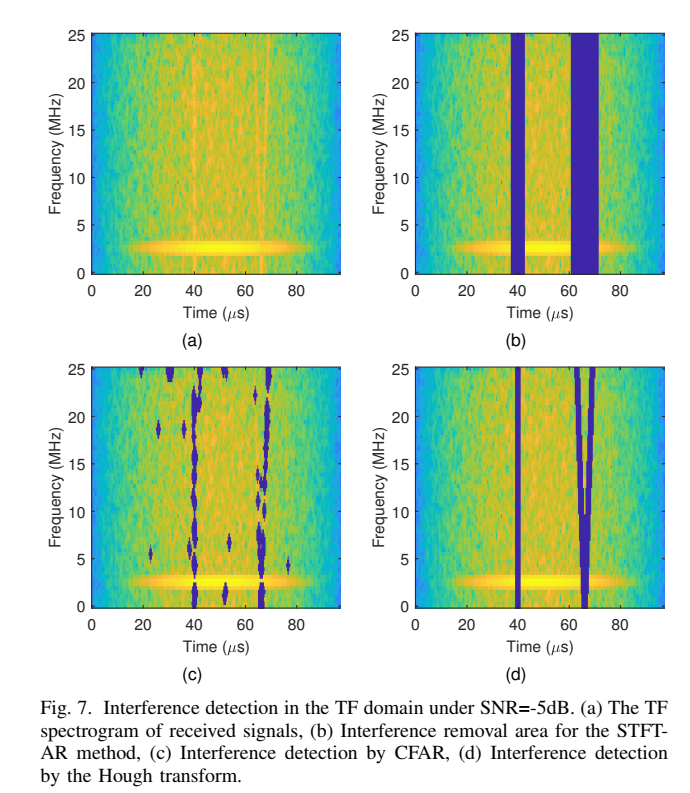
图7展示了原因。在-5dB的SNR下:
- © CFAR-Burg方法完全失效。它错误地将大量噪声识别为干扰(误报),并且未能检测到与目标回波重叠的干扰(漏报)。
- (d) 所提方法凭借其对“直线结构”的检测能力,无视噪声的干扰,准确地找到了两条干扰线。这证明了其在低SNR下的强大鲁棒性。
C. 运动目标仿真 (RD图)
此实验利用256个连续的Chirp来测试对运动目标的速度测量性能,这要求算法不仅能抑制干扰,还必须保持Chirp间的相位一致性。

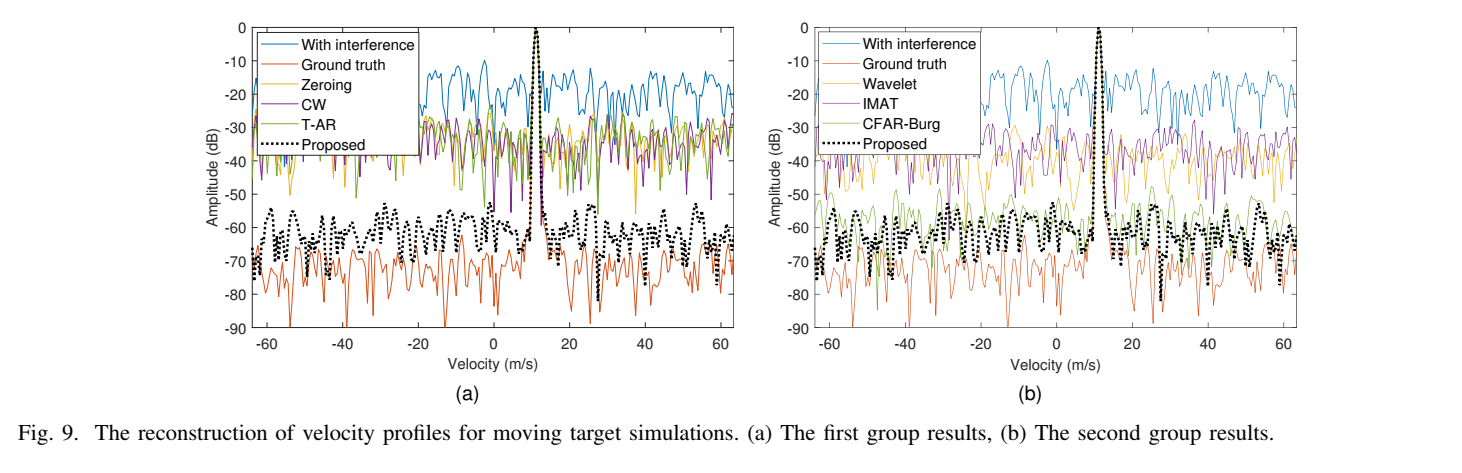
图8 和 图9 的结果:
- (b) 原始干扰数据中,目标(位于100m, 11m/s)完全被干扰淹没。
- ©-(g) 时域方法全部失败,无法恢复目标。
- (h) CFAR-Burg办法恢复了目标,但背景中仍有大量因误报和漏检导致的干扰残留,信噪比很差。
- (i) 所提方法完美地清除了干扰,得到了与(a)地面试验几乎一致的、极其干净的RD图。这证明该手段精确地抑制了干扰,同时完美地保持了信号的相位。
- 表IV的数据证实了这一点:所提方法在速度剖面上的PSLR(-52.459 dB)和ISLR(-38.637 dB最佳,遥遥领先于CFAR-Burg(-47.715 dB / -34.850 dB)。就是)指标上均
2. 真实场景实验 (Real Scenario)
实验使用了三台77GHz雷达,一台作为受害雷达,两台作为干扰源。
A. 静态目标 (角反射器)
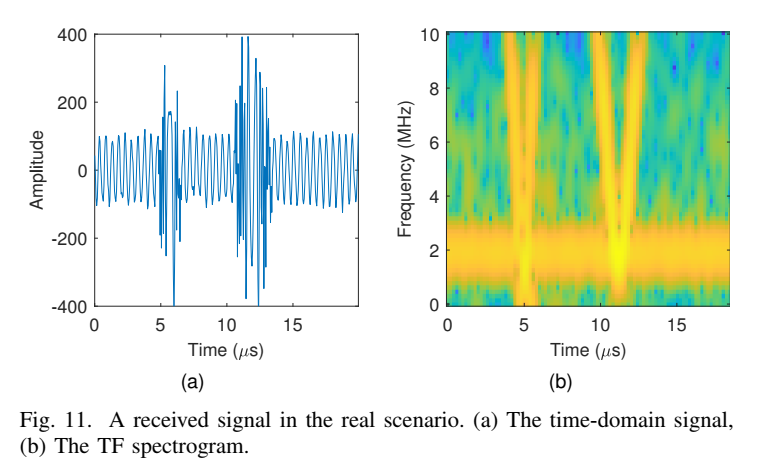
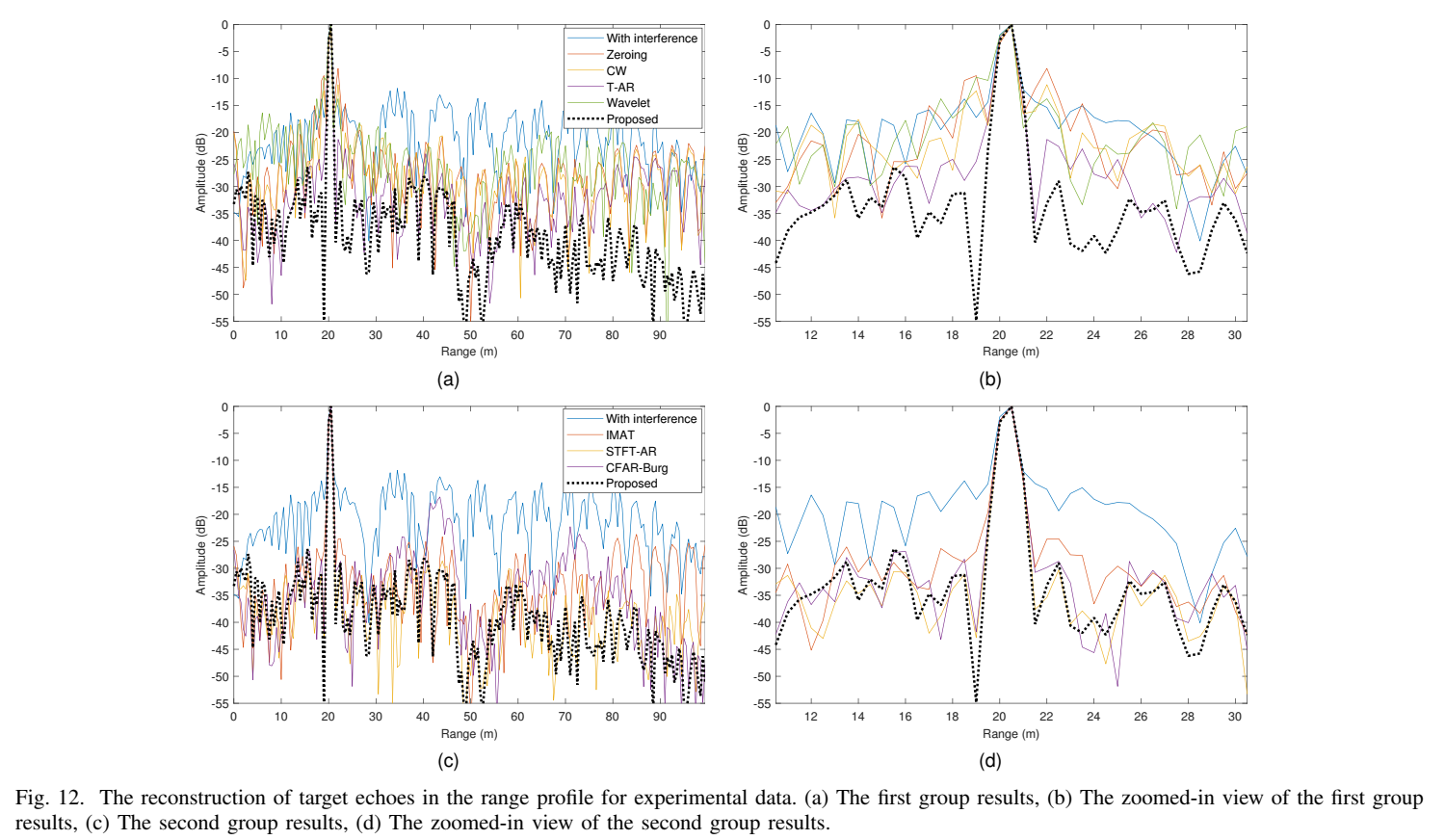
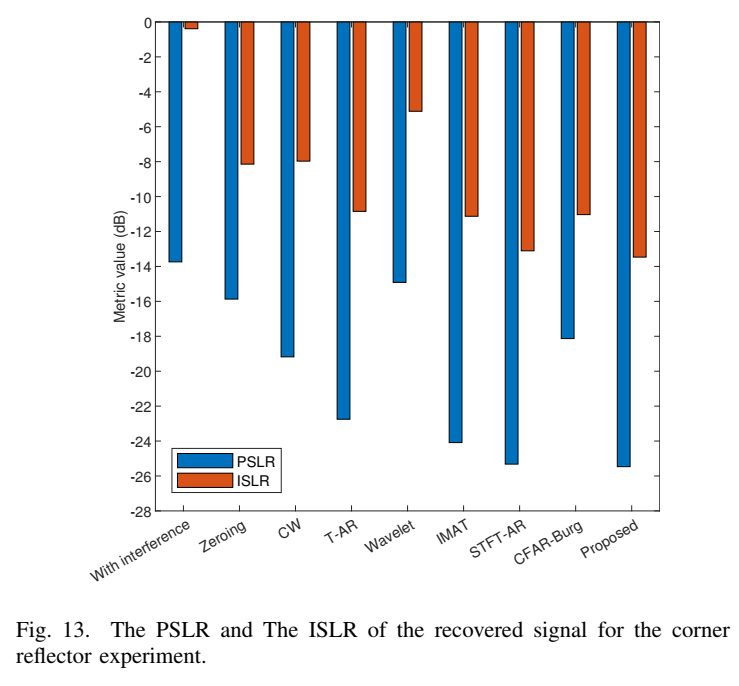
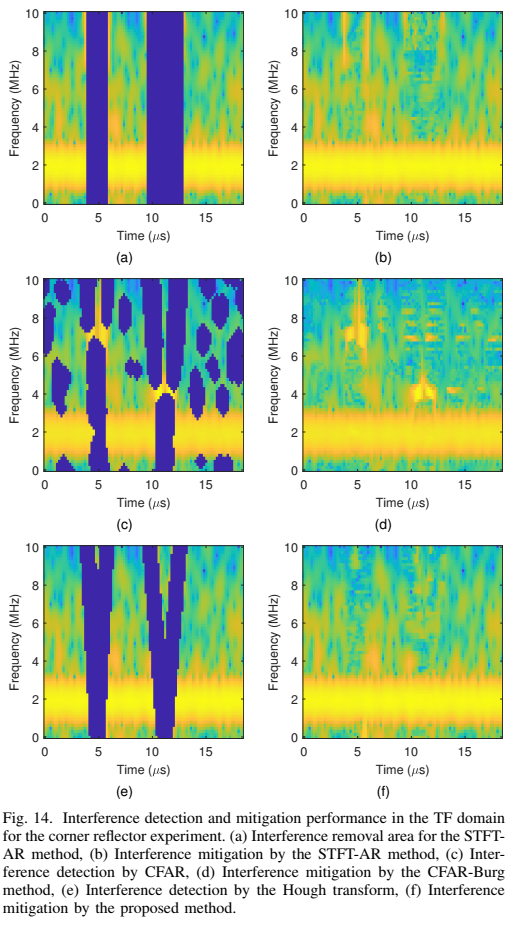
图11展示了真实采集的信号,其时频图(b)验证了模型的正确性:目标(角反射器)是水平线,而两个干扰是倾斜线。
图12 和 图13最好的。就是的结果表明,在真实数据上,所提方法的旁瓣抑制性能(PSLR/ISLR)同样
图14再次暴露了CFAR-Burg方法的缺陷:© 在真实场景的密集干扰下,CFAR的检测器“失效”了,导致干扰漏检。而 (e) 所提技巧利用结构信息,准确地定位了干扰。
B. 行人实验 (最关键的展示)
一个极具挑战性的场景:在两个强干扰源存在的情况下,检测一个在30-40米处行走的就是这弱目标(行人)。
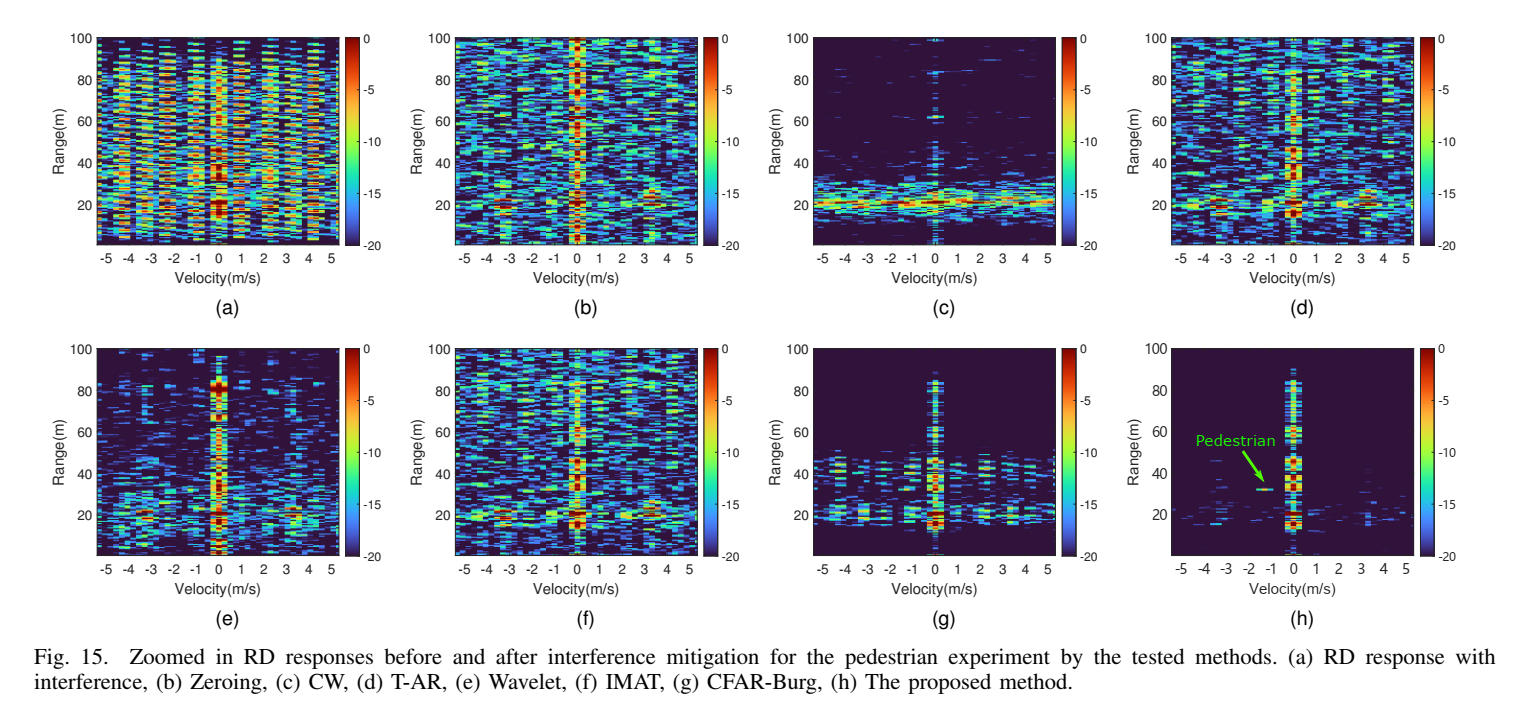
图15是这篇论文最关键的结果:
- (a) 在原始RD图中,干扰极强,行人完全不可见。
- (b)-(f) 所有时域技巧全部失败,无法检测到行人。
- (g) CFAR-Burg办法由于干扰漏检,几乎检测不到行人,目标淹没在残留的干扰中。
- (h) 所提方法成功地抑制了所有强干扰,清晰地揭示了行人的位置和速度(图中标注的“Pedestrian”)。
讨论与结论
算法复杂度 (Runtime)
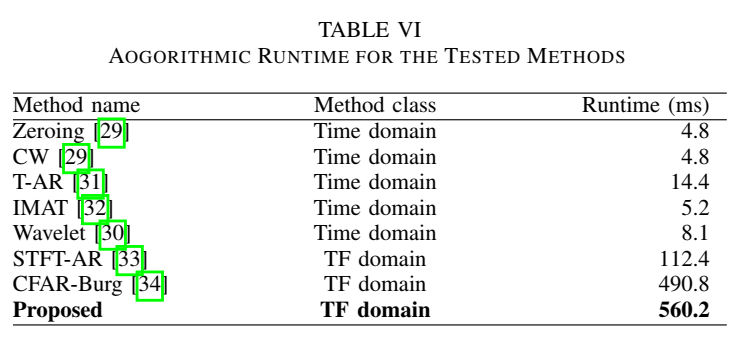
表VI相互独立的,因此就是显示,所提途径(560.2ms)是所有方法中计算时间最长的,显著慢于CFAR-Burg(490.8ms)和时域方法(~5-15ms)。这是因为霍夫变换需要在二维参数空间中进行搜索和累加,计算量巨大。但作者指出,霍夫变换的计算网格非常适合并行化处理(例如使用FPGA或GPU),在未来的实际车载芯片部署中,其运行时间许可被大幅缩短。
结论
本文分析了FMCW雷达干扰在解啁啾后于时频域上呈现的线性结构特征。基于此,提出了一种功率加权霍夫变换方法,它不依赖于干扰的幅度,而是通过在时频域累积干扰的结构功率来鲁棒地检测和定位干扰。结合AR模型进行信号恢复,该方法被证明在低SNR、低INR和干扰密集等极端条件下,其性能和鲁棒性均显著超越了现有的时域和时频域技巧。最重要的是,在真实的行人检测实验中,该途径是唯一能够从强干扰中成功恢复弱目标的算法。
附录:数学推导
如何从混频器推导出来的。这里补充这一推导。就是本文在正文中给出了信号模型和差频公式(Eq. 11, 12),但省略了它们
附录A: 目标回波差频 (fbf_bfb) 推导
1. 信号定义
根据论文 Eq. 1 和 Eq. 5,我们只看其相位项(忽略幅度和初始相位):
- 参考信号相位:φt(t)=2π(fct+12kt2)\varphi_t(t) = 2\pi(f_c t + \frac{1}{2}kt^2)φt(t)=2π(fct+21kt2)
- 回波信号相位:φe(t)=2π(fc(t−τ)+12k(t−τ)2)\varphi_e(t) = 2\pi(f_c(t-\tau) + \frac{1}{2}k(t-\tau)^2)φe(t)=2π(fc(t−τ)+21k(t−τ)2)
其中 τ=2R/c\tau = 2R/cτ=2R/c是双程延迟。
2. 混频(Dechirp)
混频器将两个信号相乘。使用积化和差公式cos(A)cos(B)=12[cos(A+B)+cos(A−B)]\cos(A)\cos(B) = \frac{1}{2}[\cos(A+B) + \cos(A-B)]cos(A)cos(B)=21[cos(A+B)+cos(A−B)]:
- 和频项 (A+BA+BA+B) :φt(t)+φe(t)\varphi_t(t) + \varphi_e(t)φt(t)+φe(t)。其频率约为2fc2f_c2fc(例如 154 GHz),会被低通滤波器(LPF)完全滤除。
- 差频项 (A−BA-BA−B) :φb(t)=φt(t)−φe(t)\varphi_b(t) = \varphi_t(t) - \varphi_e(t)φb(t)=φt(t)−φe(t)。这是利用LPF的差频信号。
3. 推导差频相位φb(t)\varphi_b(t)φb(t)
φb(t)=2π[(fct+12kt2)−(fc(t−τ)+12k(t−τ)2)]\varphi_b(t) = 2\pi \left[ (f_c t + \frac{1}{2}kt^2) - (f_c(t-\tau) + \frac{1}{2}k(t-\tau)^2) \right]φb(t)=2π[(fct+21kt2)−(fc(t−τ)+21k(t−τ)2)]
展开 ttt 的相关项:
φb(t)=2π[(fct−fct+fcτ)+12k(t2−(t2−2tτ+τ2))]\varphi_b(t) = 2\pi \left[ (f_c t - f_c t + f_c \tau) + \frac{1}{2}k (t^2 - (t^2 - 2t\tau + \tau^2)) \right]φb(t)=2π[(fct−fct+fcτ)+21k(t2−(t2−2tτ+τ2))]
φb(t)=2π[fcτ+12k(2tτ−τ2)]\varphi_b(t) = 2\pi \left[ f_c \tau + \frac{1}{2}k (2t\tau - \tau^2) \right]φb(t)=2π[fcτ+21k(2tτ−τ2)]
φb(t)=2π[(kτ)t+(fcτ−12kτ2)]\varphi_b(t) = 2\pi \left[ (k\tau)t + (f_c \tau - \frac{1}{2}k\tau^2) \right]φb(t)=2π[(kτ)t+(fcτ−21kτ2)]
4. 求解瞬时频率fbf_bfb
瞬时频率是相位对时间的导数除以2π2\pi2π:
fb(t)=12πdφb(t)dtf_b(t) = \frac{1}{2\pi} \frac{d\varphi_b(t)}{dt}fb(t)=2π1dtdφb(t)
fb(t)=12πddt(2π[(kτ)t+(fcτ−12kτ2)])f_b(t) = \frac{1}{2\pi} \frac{d}{dt} \left( 2\pi \left[ (k\tau)t + (f_c \tau - \frac{1}{2}k\tau^2) \right] \right)fb(t)=2π1dtd(2π[(kτ)t+(fcτ−21kτ2)])
fb(t)=kτf_b(t) = k\taufb(t)=kτ
一个就是这证明了目标回波的差频恒定频率kτk\taukτ,与论文中的Eq. 11完全一致。式中的fcτ−12kτ2f_c \tau - \frac{1}{2}k\tau^2fcτ−21kτ2是一个常数,对应论文Eq. 13中的恒定相位Φb\Phi_bΦb。
附录B: 干扰信号差频 (fbif_{bi}fbi) 分析
1. 信号定义
- 参考信号相位:φt(t)=2π(fct+12kt2)\varphi_t(t) = 2\pi(f_c t + \frac{1}{2}kt^2)φt(t)=2π(fct+21kt2)
- 干扰信号相位:φi(t)=2π(fci(t−τi)+12ki(t−τi)2)\varphi_i(t) = 2\pi(f_{ci}(t-\tau_i) + \frac{1}{2}k_i(t-\tau_i)^2)φi(t)=2π(fci(t−τi)+21ki(t−τi)2)
2. 混频与推导差频相位φbi(t)\varphi_{bi}(t)φbi(t)
同样,我们只看差频项φbi(t)=φt(t)−φi(t)\varphi_{bi}(t) = \varphi_t(t) - \varphi_i(t)φbi(t)=φt(t)−φi(t):
φbi(t)=2π[(fct+12kt2)−(fci(t−τi)+12ki(t−τi)2)]\varphi_{bi}(t) = 2\pi \left[ (f_c t + \frac{1}{2}kt^2) - (f_{ci}(t-\tau_i) + \frac{1}{2}k_i(t-\tau_i)^2) \right]φbi(t)=2π[(fct+21kt2)−(fci(t−τi)+21ki(t−τi)2)]
展开 ttt 的相关项:
φbi(t)=2π[fct+12kt2−(fcit−fciτi+12ki(t2−2tτi+τi2))]\varphi_{bi}(t) = 2\pi \left[ f_c t + \frac{1}{2}kt^2 - (f_{ci}t - f_{ci}\tau_i + \frac{1}{2}k_i(t^2 - 2t\tau_i + \tau_i^2)) \right]φbi(t)=2π[fct+21kt2−(fcit−fciτi+21ki(t2−2tτi+τi2))]
φbi(t)=2π[(fc−fci)t+(12k−12ki)t2+(kiτi)t+(fciτi−12kiτi2)]\varphi_{bi}(t) = 2\pi \left[ (f_c - f_{ci})t + (\frac{1}{2}k - \frac{1}{2}k_i)t^2 + (k_i \tau_i)t + (f_{ci}\tau_i - \frac{1}{2}k_i\tau_i^2) \right]φbi(t)=2π[(fc−fci)t+(21k−21ki)t2+(kiτi)t+(fciτi−21kiτi2)]
整理为 ttt的二次多项式:
φbi(t)=2π[12(k−ki)t2+(fc−fci+kiτi)t+(Constant terms)]\varphi_{bi}(t) = 2\pi \left[ \frac{1}{2}(k-k_i)t^2 + (f_c - f_{ci} + k_i \tau_i)t + (\text{Constant terms}) \right]φbi(t)=2π[21(k−ki)t2+(fc−fci+kiτi)t+(Constant terms)]
3. 求解瞬时频率fbif_{bi}fbi
fbi(t)=12πdφbi(t)dtf_{bi}(t) = \frac{1}{2\pi} \frac{d\varphi_{bi}(t)}{dt}fbi(t)=2π1dtdφbi(t)
fbi(t)=12πddt(2π[12(k−ki)t2+(fc−fci+kiτi)t+… ])f_{bi}(t) = \frac{1}{2\pi} \frac{d}{dt} \left( 2\pi \left[ \frac{1}{2}(k-k_i)t^2 + (f_c - f_{ci} + k_i \tau_i)t + \dots \right] \right)fbi(t)=2π1dtd(2π[21(k−ki)t2+(fc−fci+kiτi)t+…])
fbi(t)=(k−ki)t+(fc−fci+kiτi)f_{bi}(t) = (k-k_i)t + (f_c - f_{ci} + k_i \tau_i)fbi(t)=(k−ki)t+(fc−fci+kiτi)
分析:
这个推导结果表明,干扰差频fbi(t)f_{bi}(t)fbi(t) 是时间 ttt 的线性函数(即LFM信号),其斜率为(k−ki)(k-k_i)(k−ki)。这在物理上证实了论文的核心前提。
(注:此推导结果fbi=(fc−fci+kiτi)+(k−ki)tf_{bi} = (f_c - f_{ci} + k_i \tau_i) + (k-k_i)tfbi=(fc−fci+kiτi)+(k−ki)t 与论文中的 Eq. 12fbi=(fc−fci+kiτi)+12(k−ki)tf_{bi} = (f_c - f_{ci} + k_i \tau_i) + \frac{1}{2}(k-k_i)tfbi=(fc−fci+kiτi)+21(k−ki)t在系数上存在12\frac{1}{2}21的差异,这似乎是原文Eq. 10 和 Eq. 12之间的一个常见笔误。然而,无论斜率是(k−ki)(k-k_i)(k−ki) 还是 12(k−ki)\frac{1}{2}(k-k_i)21(k−ki),其关键物理特性——信号是一个瞬时频率随时间ttt线性变化的LFM信号——是完全成立的,这也是本文算法所依赖的根本基础。)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号