串口、IIC、中断综合应用练习
串口、IIC、中断综合应用练习
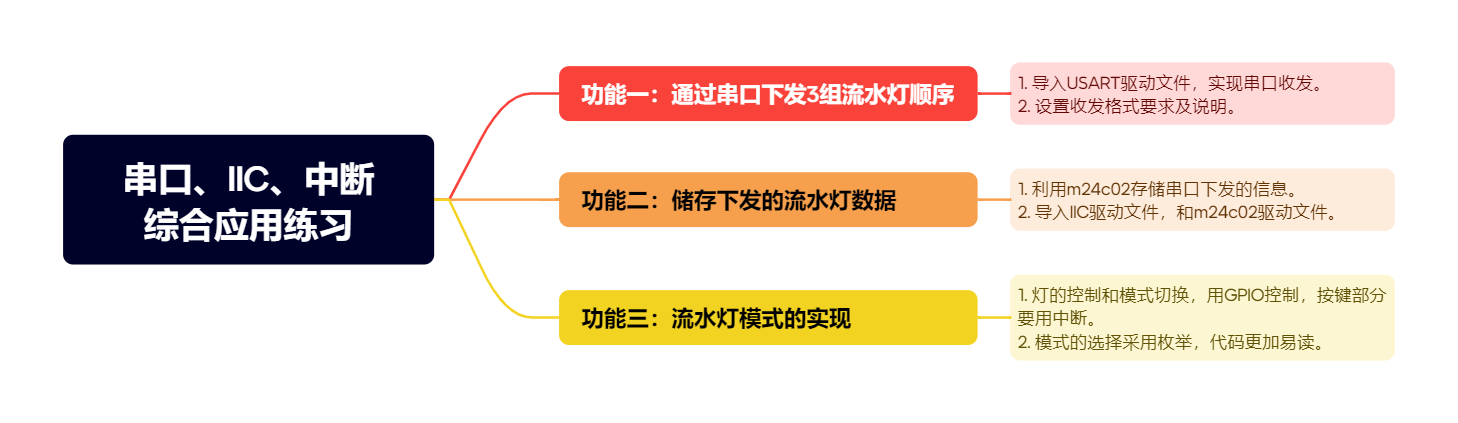
1. 项目要求
- 通过串口下发3组流水灯显示顺序
比如:1.3#3,2#2,1
则有3组流水灯显示顺序: ①led1->led3 ②led3->led2 ③led2->led1 - 当按下按键3的时候,顺序按照3种顺序显示流水灯。
比如: 第1次按下 按照1来显示流水灯
第2次按下 按照2来显示流水灯
第3次按下 按照 3 来显示流水灯
第4次按下 按照1来显示流水灯
2. 功能实现及分析
思维导图:
3. 具体实现
灯光控制可以达到项目要求效果,灯光模式串口输出储存到m24c02,然后通过按键控制模式选择
main.c
#include "USART.h"
#include "led.h"
#include "key.h"
#include "delay.h"
#include "m24c02.h"
#include "string.h"
// 定义全局变量
uint16_t leds[] = {LED_green, LED_red, LED_yellow};
uint8_t buffer[100];
uint8_t size;
uint8_t isOver;
// 用二维数组保存三组流水灯方案
uint32_t plans[3][2];
// 定义流水灯方案状态
Plan_Status plan_status = NO_PLANS;
// 声明功能函数
void LoadPlans(uint8_t *str); // 从EEPROM中读取方案
void LedFlow(void); // 流水灯实现
int main()
{
// 1. 初始化
Driver_USART1_Init();
LED_Init();
Delay_ms(500);
// printf("LED初始化完成%p\n", GPIOB->ODR);
KEY_Init();
M24C02_Init();
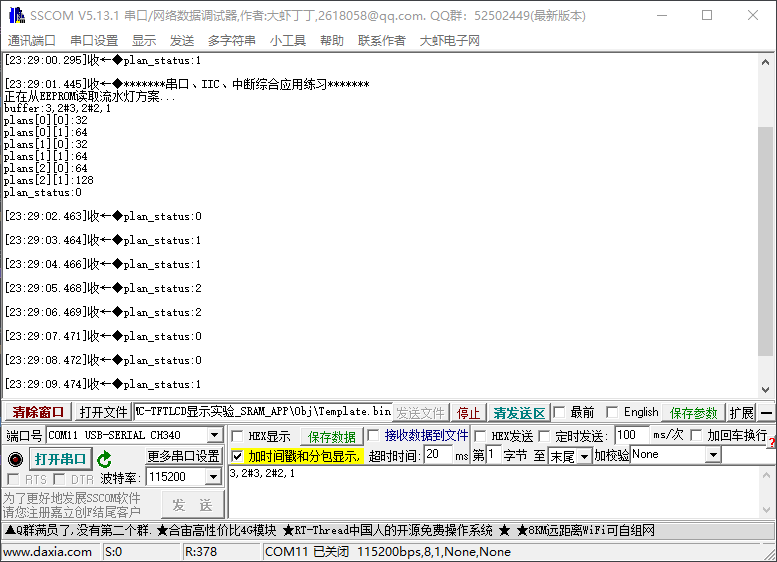
printf("*******串口、IIC、中断综合应用练习*******\n");
// 2.从EEPROM中读取方案
printf("正在从EEPROM读取流水灯方案...\n");
M24C02_ReadBytes(0x00, buffer, 11);
printf("buffer:%s\n", buffer);
LoadPlans(buffer);
while (1)
{
if (isOver)
{
// 保存到EEPROM
M24C02_WriteBytes(0x00, buffer, size);
// 清除标志位和size
size = 0;
isOver = 0;
LoadPlans(buffer);
}
// 根据状态展示流水灯
LedFlow();
}
}
// 解析流水灯方案,并加载到plans里
void LoadPlans(uint8_t *str)
{
// 判断首字符是否为0,如果为0则直接退出
if (!str[0])
{
return;
}
// 指定当前状态为第一组方案
plan_status = P1;
// 解析当前的字符串
sscanf((char *)str, "%d,%d#%d,%d#%d,%d",
&plans[0][0], &plans[0][1],
&plans[1][0], &plans[1][1],
&plans[2][0], &plans[2][1]);
// 将数值转换为对应的LED灯
for (uint8_t i = 0; i < 3; i++)
{
for (uint8_t j = 0; j < 2; j++)
{
switch (plans[i][j])
{
case 1:
plans[i][j] = LED_red;
break;
case 2:
plans[i][j] = LED_yellow;
break;
case 3:
plans[i][j] = LED_green;
break;
default:
break;
}
printf("plans[%d][%d]:%d\n", i, j, plans[i][j]);
}
}
}
// 流水灯实现
void LedFlow(void)
{
printf("plan_status:%d\n", plan_status);
switch (plan_status)
{
case P1:
LED_OffAll(leds, 3);
for (uint8_t i = 0; i < 2; i++)
{
LED_On(plans[0][i]);
Delay_ms(500);
LED_Off(plans[0][i]);
}
break;
case P2:
LED_OffAll(leds, 3);
for (uint8_t i = 0; i < 2; i++)
{
LED_On(plans[1][i]);
Delay_ms(500);
LED_Off(plans[1][i]);
}
break;
case P3:
LED_OffAll(leds, 3);
for (uint8_t i = 0; i < 2; i++)
{
LED_On(plans[2][i]);
Delay_ms(500);
LED_Off(plans[2][i]);
}
break;
default:
printf("plan_status错误\n");
break;
}
}
led.c
/*
* @Author: Yangyang
* @Date: 2025-1-16 21:41:00
* @Description: led驱动函数
*
*/
#include "led.h"
//========================================================================
/**
* @name LED_Init()
* @brief led初始化
* @param 无
* @retval 无
*/
//========================================================================
void LED_Init(void)
{
// 1. 开启对应外设时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPBEN;
// 2. 对应GPIO工作模式配置,2MHz输出,开漏
GPIOB->CRL &= ~GPIO_CRL_CNF7;
GPIOB->CRL |= GPIO_CRL_MODE7_1;
GPIOB->CRL &= ~GPIO_CRL_MODE7_0;
GPIOB->CRL &= ~GPIO_CRL_CNF6;
GPIOB->CRL |= GPIO_CRL_MODE6_1;
GPIOB->CRL &= ~GPIO_CRL_MODE6_0;
GPIOB->CRL &= ~GPIO_CRL_CNF5;
GPIOB->CRL |= GPIO_CRL_MODE5_1;
GPIOB->CRL &= ~GPIO_CRL_MODE5_0;
// 3. 所有灯引脚芯片端输出高电平,默认关灯
GPIOB->ODR |= GPIO_ODR_ODR7 | GPIO_ODR_ODR6 | GPIO_ODR_ODR5;
}
//========================================================================
/**
* @name LED_On(),LED_Off()
* @brief 控制led开关
* @param led: led引脚
* @retval 无
*/
//========================================================================
void LED_On(uint16_t led)
{
switch (led)
{
case LED_red:
GPIOB->ODR &= ~led;
break;
case LED_yellow:
GPIOB->ODR &= ~led;
break;
case LED_green:
GPIOB->ODR &= ~led;
break;
}
}
void LED_Off(uint16_t led)
{
switch (led)
{
case LED_red:
GPIOB->ODR |= led;
break;
case LED_yellow:
GPIOB->ODR |= led;
break;
case LED_green:
GPIOB->ODR |= led;
break;
}
}
// 翻转LED状态
void LED_Toggle(uint16_t led)
{
// 需要先判断当前LED状态,读取IDR对应位
if ((GPIOA->IDR & led) == 0)
{
LED_Off(led);
}
else
{
LED_On(led);
}
}
// 对一组LED灯,全开全关
void LED_OnAll(uint16_t leds[], uint8_t size)
{
for (uint8_t i = 0; i < size; i++)
{
LED_On(leds[i]);
}
}
void LED_OffAll(uint16_t leds[], uint8_t size)
{
for (uint8_t i = 0; i < size; i++)
{
LED_Off(leds[i]);
}
}
led.h
#ifndef __LED_H__
#define __LED_H__
#include "stm32f10x.h"
// 宏定义led引脚
#define LED_red GPIO_ODR_ODR7
#define LED_yellow GPIO_ODR_ODR6
#define LED_green GPIO_ODR_ODR5
// 初始化
void LED_Init(void);
// 控制LED亮灭
void LED_On(uint16_t led);
void LED_Off(uint16_t led);
// 翻转LED状态
void LED_Toggle(uint16_t led);
// 对一组LED灯,全开全关
void LED_OnAll(uint16_t leds[], uint8_t size);
void LED_OffAll(uint16_t leds[], uint8_t size);
#endif
key.c
#include "key.h"
void KEY_Init(void)
{
// 1. 配置时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
RCC->APB2ENR |= RCC_APB2ENR_AFIOEN;
// 2. 配置GPIO工作模式和默认输入值
GPIOA->CRL &= ~GPIO_CRL_MODE7;
GPIOA->CRL |= GPIO_CRL_CNF7_1;
GPIOA->CRL &= ~GPIO_CRL_CNF7_0;
GPIOA->ODR &= ~GPIO_ODR_ODR7;
// 3. AFIO配置引脚复用选择
AFIO->EXTICR[2] |= AFIO_EXTICR3_EXTI10_PA;
AFIO->EXTICR[1] &= ~AFIO_EXTICR2_EXTI7;
AFIO->EXTICR[1] |= AFIO_EXTICR2_EXTI7_PA;
// 4. 配置EXTI
EXTI->RTSR |= EXTI_RTSR_TR7; // 允许线下降沿触发
EXTI->IMR |= EXTI_IMR_MR7; // 允许MR7线的中断请求
// 5. NVIC配置
NVIC_SetPriorityGrouping(3); // 全部都是抢占优先级
NVIC_SetPriority(EXTI9_5_IRQn, 3);
NVIC_EnableIRQ(EXTI9_5_IRQn);
}
// 中断服务程序
void EXTI9_5_IRQHandler(void)
{
// 先清除中断挂起标志位
EXTI->PR |= EXTI_PR_PR7;
//plan_status = (Plan_Status)((plan_status + 1) % 3);
// 防抖延迟
Delay_ms(10);
if ((GPIOA->IDR & GPIO_IDR_IDR7) != 0)
{
plan_status = (Plan_Status)((plan_status + 1) % 3);
}
}
key.h
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h"
#include "delay.h"
#include "led.h"
typedef enum
{
NO_PLANS = -1,
P1,
P2,
P3
} Plan_Status;
extern Plan_Status plan_status;
void KEY_Init(void);
#endif
usart.c
#include "USART.h"
/**
* @description: 初始化串口1
*/
void Driver_USART1_Init(void)
{
/* 1. 开启时钟 */
/* 1.1 串口1外设的时钟 */
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
/* 1.2 GPIO时钟 */
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
/* 2. 配置GPIO引脚的工作模式 PA9=Tx(复用推挽 CNF=10 MODE=11) PA10=Rx(浮空输入 CNF=01 MODE=00)*/
GPIOA->CRH |= GPIO_CRH_CNF9_1;
GPIOA->CRH &= ~GPIO_CRH_CNF9_0;
GPIOA->CRH |= GPIO_CRH_MODE9;
GPIOA->CRH &= ~GPIO_CRH_CNF10_1;
GPIOA->CRH |= GPIO_CRH_CNF10_0;
GPIOA->CRH &= ~GPIO_CRH_MODE10;
/* 3. 串口的参数配置 */
/* 3.1 配置波特率 115200 */
USART1->BRR = 0x271;
/* 3.2 串口使能,并使能接收和发送 */
// USART1->CR1 |= USART_CR1_UE;
USART1->CR1 |= USART_CR1_TE;
USART1->CR1 |= USART_CR1_RE;
/* 3.3 配置一个字的长度 8位 */
USART1->CR1 &= ~USART_CR1_M;
/* 3.4 配置不需要校验位 */
USART1->CR1 &= ~USART_CR1_PCE;
/* 3.5 配置停止位的长度为1个停止位 */
USART1->CR2 &= ~USART_CR2_STOP;
/* 3.6 使能串口的各种中断 */
USART1->CR1 |= USART_CR1_RXNEIE; /* 接收非空中断 */
USART1->CR1 |= USART_CR1_IDLEIE; /* 空闲中断 */
/* 4. 配置NVIC */
/* 4.1 配置优先级组 */
NVIC_SetPriorityGrouping(3);
/* 4.2 设置优先级 */
NVIC_SetPriority(USART1_IRQn, 2);
/* 4.3 使能串口1的中断 */
NVIC_EnableIRQ(USART1_IRQn);
/* 4. 使能串口 */
USART1->CR1 |= USART_CR1_UE;
}
/**
* @description: 发送一个字节
* @param {uint8_t} byte 要发送的字节
*/
void Driver_USART1_SendChar(uint8_t byte)
{
/* 1. 等待发送寄存器为空 */
while ((USART1->SR & USART_SR_TXE) == 0)
;
/* 2. 数据写出到数据寄存器 */
USART1->DR = byte;
}
/**
* @description: 发送一个字符串
* @param {uint8_t} *str 要发送的字符串
* @param {uint16_t} len 字符串中字节的长度
* @return {*}
*/
void Driver_USART1_SendString(uint8_t *str, uint16_t len)
{
for (uint16_t i = 0; i < len; i++)
{
Driver_USART1_SendChar(str[i]);
}
}
// /**
// * @description: 接收一个字节的数据
// * @return {*} 接收到的字节
// */
// uint8_t Driver_USART1_ReceiveChar(void)
// {
// /* 等待数据寄存器非空 */
// while ((USART1->SR & USART_SR_RXNE) == 0)
// ;
// return USART1->DR;
// }
// /**
// * @description: 接收变长数据.接收到的数据存入到buff中
// * @param {uint8_t} buff 存放接收到的数据
// * @param {uint8_t} *len 存放收到的数据的字节的长度
// */
// void Driver_USART1_ReceiveString(uint8_t buff[], uint8_t *len)
// {
// uint8_t i = 0;
// while (1)
// {
// // 等待接收非空
// while ((USART1->SR & USART_SR_RXNE) == 0)
// {
// // 在等待期间, 判断是否收到空闲帧
// if (USART1->SR & USART_SR_IDLE)
// {
// *len = i;
// return;
// }
// }
// buff[i] = USART1->DR;
// i++;
// }
// }
// 中断服务程序
void USART1_IRQHandler(void)
{
if ((USART1->SR & USART_SR_RXNE))
{
// 接收到一个字符,就放入缓冲区
buffer[size++] = USART1->DR;
}
else if ((USART1->SR & USART_SR_IDLE))
{
// 字符串接收完毕,置位标志位,清除IDLE
USART1->DR;
isOver = 1;
}
}
// 重写putchar,用于printf重定向
int fputc(int c, FILE *file)
{
Driver_USART1_SendChar(c);
return c;
}
usart.h
#ifndef __USART_H__
#define __USART_H__
#include "stm32f10x.h"
#include "stdio.h"
extern uint8_t buffer[100];
extern uint8_t size;
extern uint8_t isOver;
void Driver_USART1_Init(void);
void Driver_USART1_SendChar(uint8_t byte);
void Driver_USART1_SendString(uint8_t *str, uint16_t len);
// uint8_t Driver_USART1_ReceiveChar(void);
// void Driver_USART1_ReceiveString(uint8_t buff[], uint8_t *len);
#endif
iic.c
#include "iic.h"
// 初始化
void I2C_Init(void)
{
// 1. 配置时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPBEN;
RCC->APB1ENR |= RCC_APB1ENR_I2C2EN;
// 2. GPIO工作模式配置:复用开漏输出 CNF-11,MODE-11
GPIOB->CRH |= (GPIO_CRH_MODE10 | GPIO_CRH_MODE11 |
GPIO_CRH_CNF10 | GPIO_CRH_CNF11);
// 3. I2C2配置
// 3.1 硬件工作模式
I2C2->CR1 &= ~I2C_CR1_SMBUS;
I2C2->CCR &= ~I2C_CCR_FS;
// 3.2 选择输入的时钟频率
I2C2->CR2 |= 36;
// 3.3 配置CCR,对应数据传输速率100kb/s,SCL高电平时间为 5us
I2C2->CCR |= 180;
// 3.4 配置TRISE,SCL上升沿最大时钟周期数 + 1
I2C2->TRISE |= 37;
// 3.5 使能I2C2模块
I2C2->CR1 |= I2C_CR1_PE;
}
// 发出起始信号
uint8_t I2C_Start(void)
{
// 产生一个起始信号
I2C2->CR1 |= I2C_CR1_START;
// 引入一个超时时间
uint16_t timeout = 0xffff;
// 等待起始信号发出
while ((I2C2->SR1 & I2C_SR1_SB) == 0 && timeout)
{
timeout--;
}
return timeout ? OK : FAIL;
}
// 设置接收完成之后发出停止信号
void I2C_Stop(void)
{
I2C2->CR1 |= I2C_CR1_STOP;
}
// 主机设置使能应答信号
void I2C_Ack(void)
{
I2C2->CR1 |= I2C_CR1_ACK;
}
// 主机设置使能非应答信号
void I2C_Nack(void)
{
I2C2->CR1 &= ~I2C_CR1_ACK;
}
// 主机发送设备地址,并等待应答
uint8_t I2C_SendAddr(uint8_t addr)
{
// 直接将要发送的地址给到DR
I2C2->DR = addr;
// 等待应答
uint16_t timeout = 0xffff;
while ((I2C2->SR1 & I2C_SR1_ADDR) == 0 && timeout)
{
timeout--;
}
// 访问SR2,清除ADDR标志位
if (timeout > 0)
{
I2C2->SR2;
}
return timeout ? OK : FAIL;
}
// 主机发送一个字节的数据(写入),并等待应答
uint8_t I2C_SendByte(uint8_t byte)
{
// 1. 先等待DR为空,上一个字节数据已经发送完毕
uint16_t timeout = 0xffff;
while ((I2C2->SR1 & I2C_SR1_TXE) == 0 && timeout)
{
timeout--;
}
// 2. 将要发送的字节放入DR中
I2C2->DR = byte;
// 3. 等待应答
timeout = 0xffff;
while ((I2C2->SR1 & I2C_SR1_BTF) == 0 && timeout)
{
timeout--;
}
return timeout ? OK : FAIL;
}
// 主机从EEPROM接收一个字节的数据(读取)
uint8_t I2C_ReadByte(void)
{
// 1. 先等待DR为满
uint16_t timeout = 0xffff;
while ((I2C2->SR1 & I2C_SR1_RXNE) == 0 && timeout)
{
timeout--;
}
// 2. 将收到的字节数据返回
return timeout ? I2C2->DR : FAIL;
}
iic.h
#ifndef __IIC_H
#define __IIC_H
#include "stm32f10x.h"
#include "delay.h"
// 宏定义
#define OK 0
#define FAIL 1
// 初始化
void I2C_Init(void);
// 发出起始信号
uint8_t I2C_Start(void);
// 设置发出停止信号
void I2C_Stop(void);
// 主机设置使能应答信号
void I2C_Ack(void);
// 主机设置使能非应答信号
void I2C_Nack(void);
// 主机发送设备地址,并等待应答
uint8_t I2C_SendAddr(uint8_t addr);
// 主机发送一个字节的数据(写入),并等待应答
uint8_t I2C_SendByte(uint8_t byte);
// 主机从EEPROM接收一个字节的数据(读取)
uint8_t I2C_ReadByte(void);
#endif
m24c02.c
#include "m24c02.h"
// 初始化
void M24C02_Init(void)
{
I2C_Init();
}
// 向EEPROM写入一个字节
void M24C02_WriteByte(uint8_t innerAddr, uint8_t byte)
{
// 1. 发出开始信号
I2C_Start();
// 2. 发送写地址
I2C_SendAddr(W_ADDR);
// 3. 发送内部地址
I2C_SendByte(innerAddr);
// 4. 发送具体数据
I2C_SendByte(byte);
// 5. 发出一个停止信号
I2C_Stop();
// 延迟等待写入周期结束
Delay_ms(5);
}
// 读取EEPROM的一个字节
uint8_t M24C02_ReadByte(uint8_t innerAddr)
{
// 1. 发出开始信号
I2C_Start();
// 2. 发送写地址(假写)
I2C_SendAddr(W_ADDR);
// 3. 发送内部地址
I2C_SendByte(innerAddr);
// 4. 发出开始信号
I2C_Start();
// 5. 发送读地址(真读)
I2C_SendAddr(R_ADDR);
// 6. 设置非应答
I2C_Nack();
// 7. 设置在接收下一个字节后发出停止信号
I2C_Stop();
// 8. 读取一个字节
uint8_t byte = I2C_ReadByte();
return byte;
}
// 连续写入多个字节(页写)
void M24C02_WriteBytes(uint8_t innerAddr, uint8_t *bytes, uint8_t size)
{
// 1. 发出开始信号
I2C_Start();
// 2. 发送写地址
I2C_SendAddr(W_ADDR);
// 3. 发送内部地址
I2C_SendByte(innerAddr);
// 利用循环不停发送数据
for (uint8_t i = 0; i < size; i++)
{
// 4. 发送具体数据
I2C_SendByte(bytes[i]);
}
// 5. 发出一个停止信号
I2C_Stop();
// 延迟等待写入周期结束
Delay_ms(5);
}
// 连续读取多个字节
void M24C02_ReadBytes(uint8_t innerAddr, uint8_t *buffer, uint8_t size)
{
// 1. 发出开始信号
I2C_Start();
// 2. 发送写地址(假写)
I2C_SendAddr(W_ADDR);
// 3. 发送内部地址
I2C_SendByte(innerAddr);
// 4. 发出开始信号
I2C_Start();
// 5. 发送读地址(真读)
I2C_SendAddr(R_ADDR);
// 利用循环连续读取多个字节
for (uint8_t i = 0; i < size; i++)
{
// 6. 设置应答或非应答
if (i < size - 1)
{
I2C_Ack();
}
else
{
I2C_Nack();
// 7. 设置发出停止信号
I2C_Stop();
}
// 8. 读取一个字节
buffer[i] = I2C_ReadByte();
}
}
m24c02.h
#ifndef __M24C02_H
#define __M24C02_H
#include "iic.h"
// 宏定义
#define W_ADDR 0xA0
#define R_ADDR 0xA1
// 初始化
void M24C02_Init(void);
// 向EEPROM写入一个字节
void M24C02_WriteByte(uint8_t innerAddr, uint8_t byte);
// 读取EEPROM的一个字节
uint8_t M24C02_ReadByte(uint8_t innerAddr);
// 连续写入多个字节(页写)
void M24C02_WriteBytes(uint8_t innerAddr, uint8_t * bytes, uint8_t size);
// 连续读取多个字节
void M24C02_ReadBytes(uint8_t innerAddr, uint8_t * buffer, uint8_t size);
#endif
delay.c
#include "delay.h"
// 延时函数,微秒作为单位,利用系统嘀嗒定时器,72MHz,一次嘀嗒 1/72 us
void Delay_us(uint16_t us)
{
// 1. 装载一个计数值,72 * us
SysTick->LOAD = 72 * us;
// 2. 配置,使用系统时钟(1),计数结束不产生中断(0),使能定时器(1)
SysTick->CTRL = 0x05;
// 3. 等待计数值变为0,判断CTRL标志位COUNTFLAG是否为1
while ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG) == 0)
{}
// 4. 关闭定时器
// SysTick->CTRL &= ~SysTick_CTRL_ENABLE;
}
void Delay_ms(uint16_t ms)
{
while (ms--)
{
Delay_us(1000);
}
}
void Delay_s(uint16_t s)
{
while (s--)
{
Delay_ms(1000);
}
}
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "stm32f10x.h"
void Delay_us(uint16_t us);
void Delay_ms(uint16_t ms);
void Delay_s(uint16_t s);
#endif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号