

R树详解
$B$ 树的搜索本质上是一维区间的划分过程,每次搜索节点所找到的子节点其实就是一个子区间。$R$ 树是把 $B$ 树的思想扩展到了多维空间,
采用了 $B$ 树分割空间的思想,是一棵用来存储高维数据的平衡树。
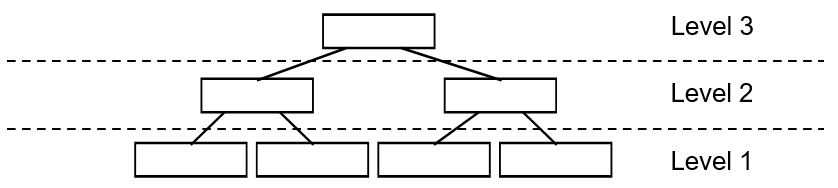
对于一棵 $R$ 树,叶子节点所在层次称为 $Level \; 1$,根节点所在层次称为 $Level \; h$。一棵 $R$ 树满足如下性质:
1)除根结点之外,所有非根结点包含有 $m$ 至 $M$ 个记录索引(条目)。根结点的记录个数可以少于 $m$。通常 $m=\frac{M}{2}$。
2)每一个非叶子结点的分支数和该节点内的条目数相同,一个条目对应一个分支。所有叶子结点都位于同一层,因此 $R$ 树为平衡树。
3)叶子结点的每一个条目表示一个点。
4)非叶结点的每一个条目存放的数据结构为:$(I, child-pointer)$。$child-pointer$ 是指向该条目对应孩子结点的指针。$I$ 表示
一个 $n$ 维空间中的最小边界矩形($minimum \; bounding \; rectangle$,即 $MBR$),$I$ 覆盖了该条目对应子树中所有的矩形或点。
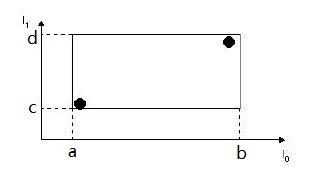
两个黑点保存在一个叶子节点的两个条目中,恰好框住这两个条目的矩形表示为:$I=(I_0,I_1)$。其中 $I_0=(a,b),I_1=(c,d)$,也就
是说最小边界矩形是用各个维度的边来表示,在三维空间中那就是立方体,用 $3$ 条边就可以表示了。
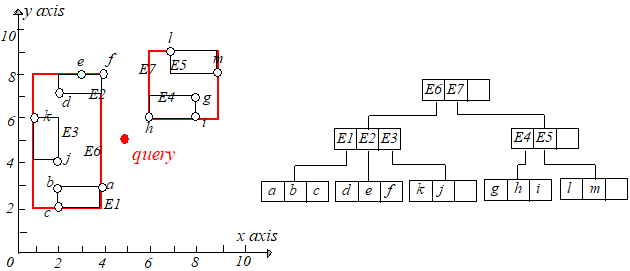
下面构建一棵 $R$ 树。如下左图,理论上,点可以任意组合成叶节点,只要 $MBR$ 包含它子树中的所有点。特别是 $MBR$ 可以重叠。下面
右图是另一种组合建立的 $R$ 树。
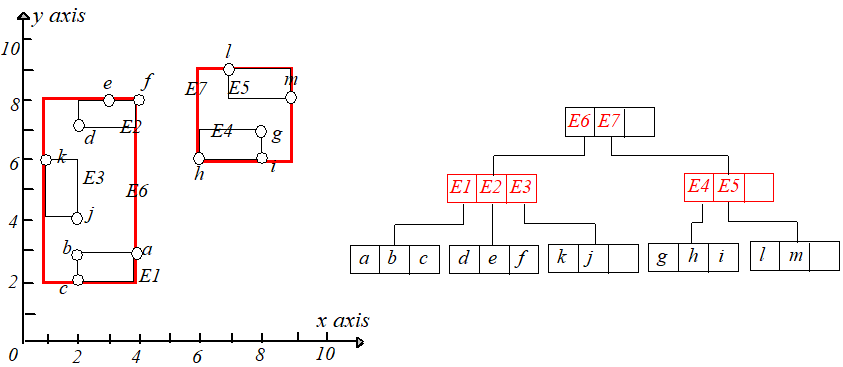
哪种分组更好呢?一般分组的原则就是最小化每个 $MBR$ 矩形,这样查询的时候发生的相交情况会越少,查询的分支就越少,查询效率越高。
R-tree 查询
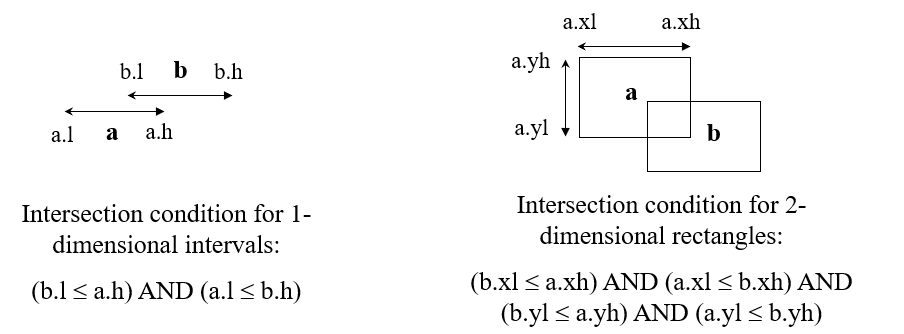
介绍查询之前,需要先了解下:如何判断两个线段或者两个矩形是否相交?
1. Range Query
这种查询输入的是一个矩形所表示的范围,要求输出该范围内的所有点。从根节点开始,通过判断目标矩形和节点内的每一个条目对应的
矩形是否相交来选择下一步查询的节点,如果有多个条目都相交,那对应的各个分支都得查。到达叶子节点后,就判断该叶子节点的每一
个条目是否在查询区域内即可。
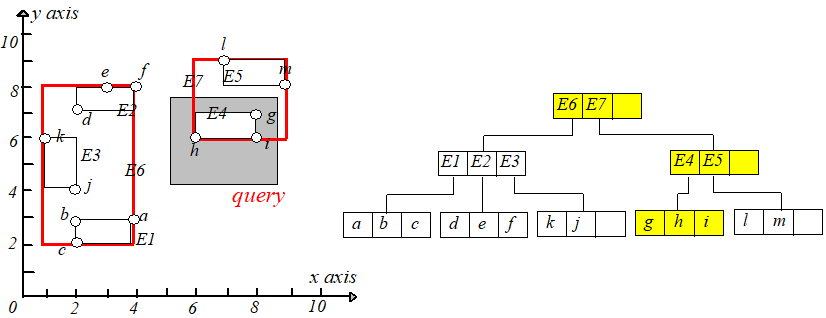
现在想查询在矩形 $[5,8.5],[4,7.5]$ 内的所有点,即下图中的阴影矩形,设该矩形为 $q$。首先判断 $E6.I,E7.I$ 和 $q$ 是否相交,发现 $E7.I$
与 $q$ 相交,于是通过 $E7$ 中的 $child-pointer$ 指针到达孩子节点,再判断 $E4.I,E5.I$ 和 $q$ 是否相交,发现 $E4.I$ 与 $q$ 相交,接下来
就到达叶子节点了,然后判断每个点是否在矩形 $q$ 内即可,如果在则输出。
2. Nearest Neighbor Query
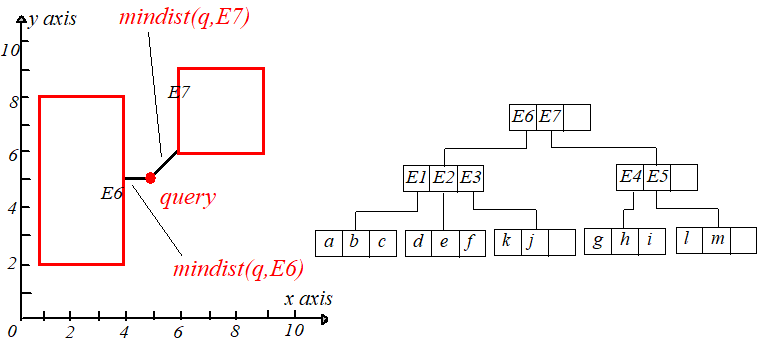
这种查询输入的是一个点,要求输出离这个点最近的 $k$ 个点,所以又叫 $k-NN$ 查询。首先需要知道如何定义一个点到一个矩形的最
短距离,记点 $q$ 到矩形 $E$ 的最短距离为 $mindist(q,E)$。规定:以 $q$ 为圆心,与 $E$ 有交点的最小圆的半径就是 $mindist(q,E)$。
$k-NN$ 查询有两种算法,下面一一介绍。
1)Depth-First NN Algorithm
假设 $k=1$,即查找距 $q$ 最近的一个点。
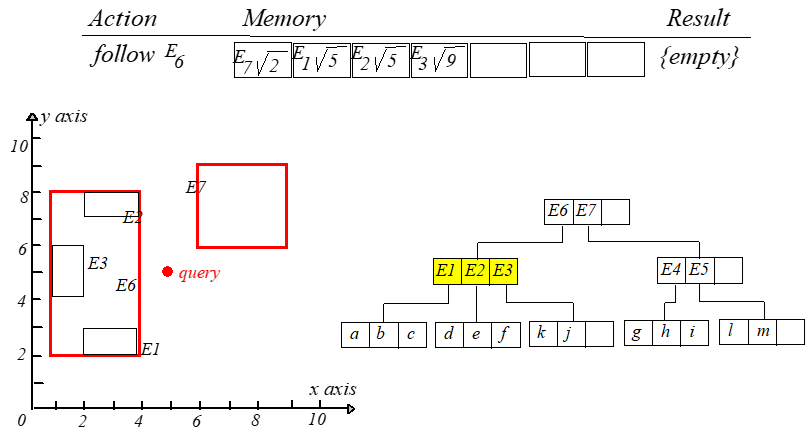
输入一个点 $q$,从根节点开始,计算 $q$ 到每个条目对应矩形的最短距离,即 $mindist(q,E6.I),mindist(q,E7.I)$,计算完后从小到大排序。
因为 $mindist(q,E6.I) < mindist(q,E7.I)$,所以来到 $E6$ 的孩子节点,同样计算 $mindist(q,E1.I),mindist(q,E2.I),mindist(q,E3.I)$,
并从小到大排序,如下右图。
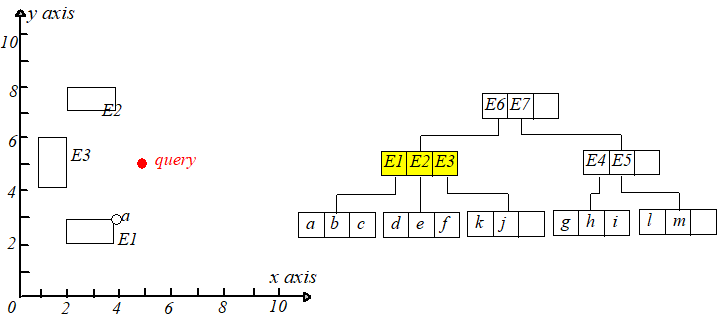
$q$ 到 $E1.I$ 和 $E2.I$ 有相同的最短距离,于是随机选择一个,这里选择 $E1$,于是来到 $E1$ 的叶子节点。计算点 $a,b,c$ 到 $q$ 点的距离,
保存距离 $q$ 最近的那个点的距离,显然 $a,q$ 距离最近,这个距离记为 $r$,这个 $r$ 只是当前搜索结果。接下进行回溯,回到上一个节点,注意
$q$ 到所经过节点每个条目的最短距离都已经算好并升序排列,现在选择距离 $q$ 第二近的那个条目即 $E2$,此时有一步很重要的剪枝操作,需要
判断$mindist(q,E2.I)$ 和 $r$ 的大小,如果 $mindist(q,E2.I) > r$,那显然没有必要再去搜索它的子树了,因为$E2$ 区域中的点到 $q$ 的距离不
可能会比 $r$ 小了。
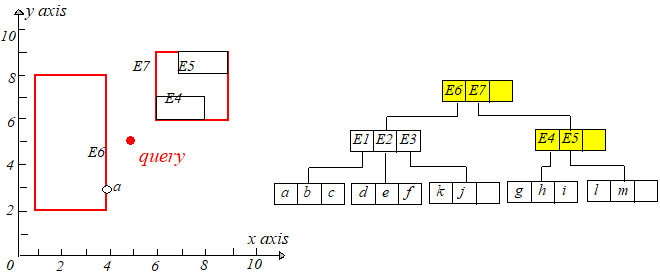
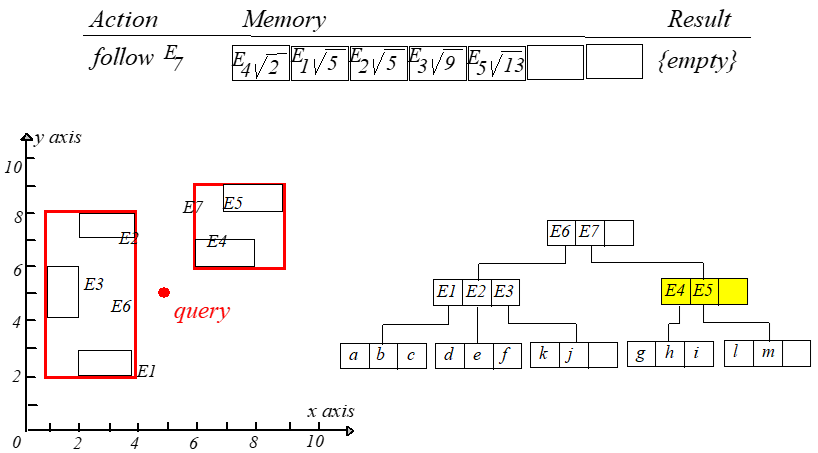
接下来回溯到根节点,因为 $mindist(q,E7.I) < r$,所以在 $E7$ 区域中可能存在到 $q$ 的距离比 $r$ 小的点,需要搜索。来到 $7$ 的孩子节点,
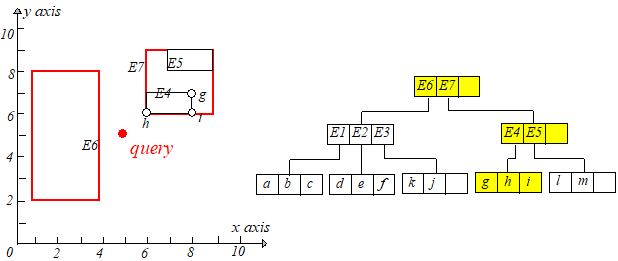
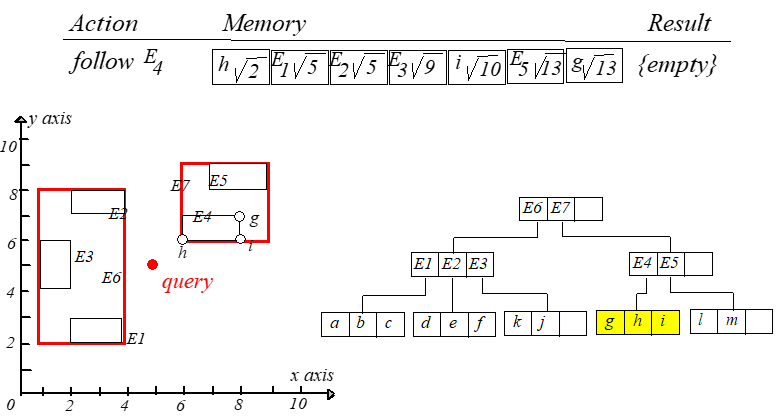
计算 $mindist(q,E4.I),mindist(q,E5.I)$ 并升序排列,接下来访问 $E4$ 的孩子节点,发现 $q,h$,的距离小于 $r$,于是用新的最短距离更新 $r$。
然后再回溯,在已升序排列的数组里取下一个节点,判断是否剪枝。。。。
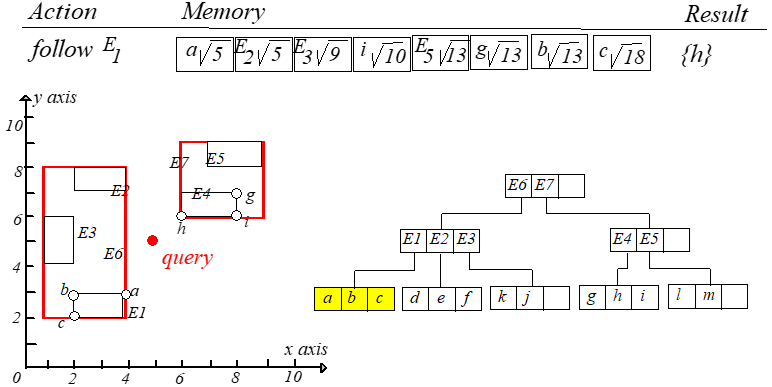
当 $k=2$ 时,过程也是一样的,只不过要保存两个距离(最短和次短),并使用次短距离进行剪枝。过程如下:
a. Root => child node of E6 => child node of E1 => find {a, b} here
b. Backtrack to child node of E6 => child node of E2 (its mindist < dist(q, b)) => update the result to {a, f}
c. Backtrack to child node of E6 => child node of E3 => backtrack to the root => child node of E7 => child node of E4 => update the result to {a, h}
d. Backtrack to child node of E7 => prune E5 => backtrack to the root => end.
2)Best-First Algorithm
这个算法需要维护一张点 $q$ 到所访问条目的最短距离表,这张表按升序排列,直接来看一下搜索过程。
访问根节点的时候计算 $mindist(q,E6.I),mindist(q,E7.I)$,分别保存为位置 $0$ 和 $1$。每一次迭代都访问第一个元素。计算 $q$
到新结点每个条目的最短距离,然后更新表并重新排序。整个过程如下图所示,从左往右,从上到下阅读。
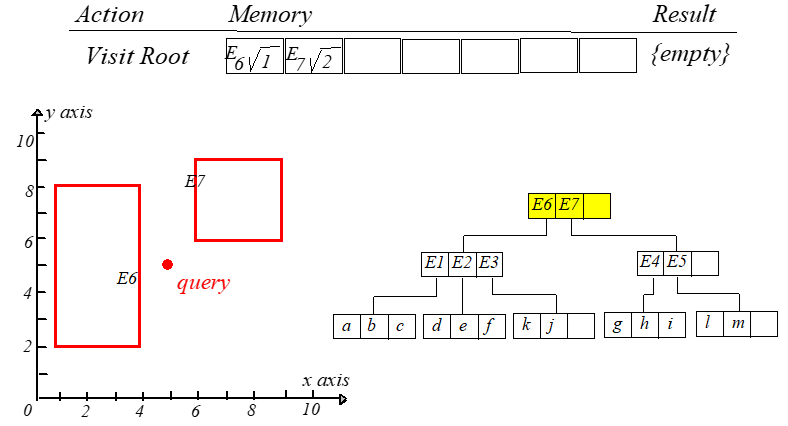
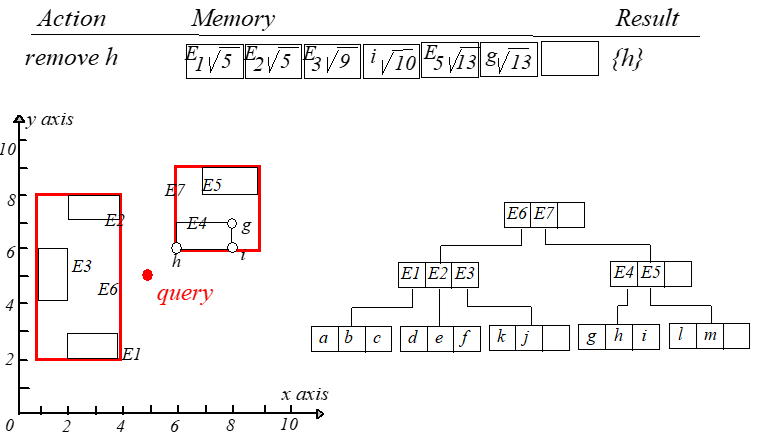
此时就可以得到点 $h$ 到 $q$ 的距离最短。如果 $k=2$,则继续搜索。
R-tree 插入
插入的可以是一个点,也可以说是一个 $R$ 树。
1. 插入一个点 $p$
设根节点为 $N$,遍历 $N$ 中所有条目,找出添加该点后 $E.I$ 扩张最小的条目(代价最小),并把该条目对应的孩子节点定义为 $F$。如果有多
个这样的条目,那么选择面积最小的条目。将 $N$ 设为 $F$,开始上述重复操作直到找到一个叶子节点。
如果选择出来的叶子节点有足够的空间来放置点 $p$,则直接添加一个条目就可以了。如果没有足够的空间,即插入后该叶子节点含有的条目高
于 $M$,则需要进行节点分裂。分裂方法如下:
将插入 $p$ 后的叶子节点分裂为两个结点 $L$ 与 $LL$,这两个结点包含了原来叶子节点 $L$ 中的所有条目与新条目。
将 $N$ 设为 $L$,设 $P$ 为 $N$ 的父节点,$EN$ 为父节点 $P$ 中指向 $N$ 的条目。调整 $EN.I$ 以保证所有在 $N$ 中的条目都被恰好包围。
创建一个指向 $NN$ 的条目 $ENN$。如果 $P$ 有空间来存放 $ENN$,则将 $ENN$ 添加到 $P$ 中。如果没有,则对 $P$ 进行分裂操作得到 $P$
和 $PP$。设 $N$ 为 $P$,$NN$ 为 $PP$,按相同的规则继续向上层传播。
如果结点分裂,且该分裂向上传播导致了根结点的分裂,那么需要创建一个新的根结点,并且让它的两个孩子结点分别为原来那个根结点分裂
后的两个结点,$R$ 树增高,程序结束。
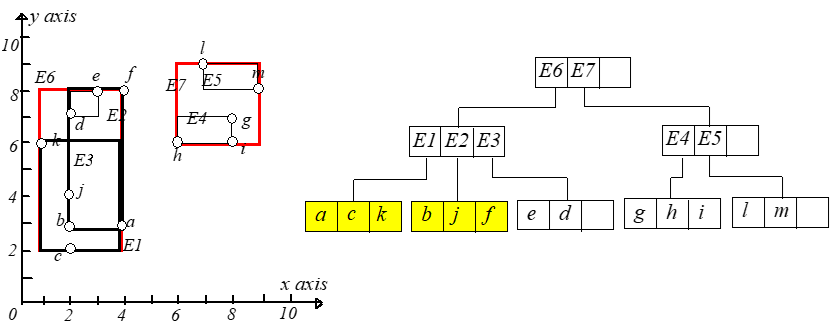
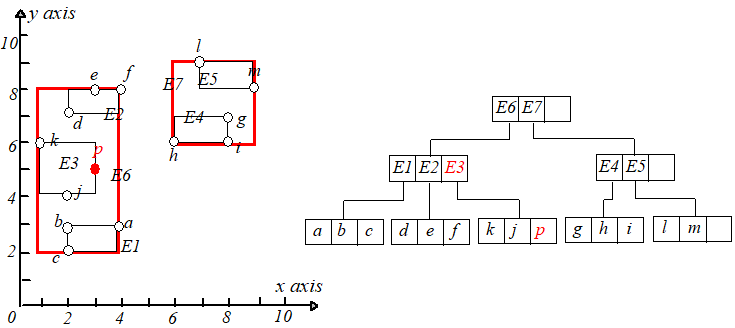
举个例子,假设 $M=3$,把点 $p(3,5)$ 插入到 $R$ 树中,根据最小调整代价原则,最终选择将点 $p$ 插入到 $E3$ 中。如下图所示。
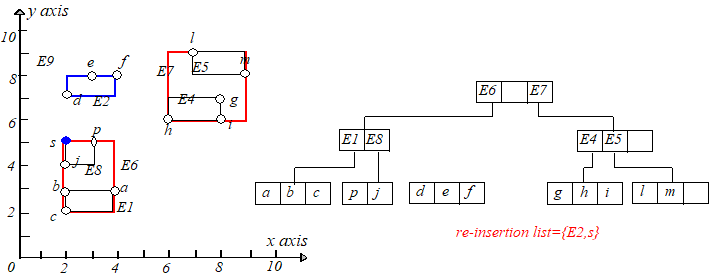
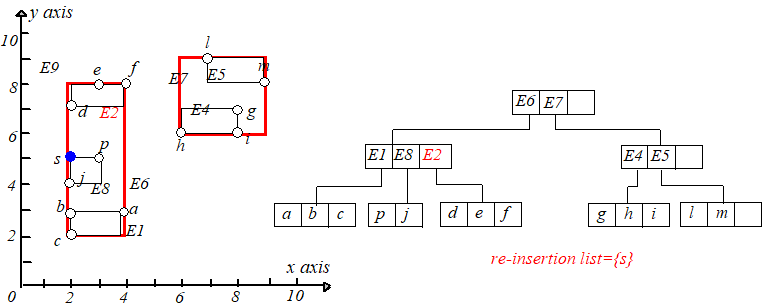
接下来继续插入点 $s(2,5)$,点 $s$ 应该被插入到 $E3$ 指向的叶子节点中,但是插入后该叶子节点的条目变成了 $4$(>M),于是需要进行节点分裂。
将 $k,s,j,p$ 分裂为两个叶子节点,分别包含 $k,s$ 和 $j,p$,并调整 $E3.I$,然后为新节点(包含 $j,p$)创建一个新条目 $E8$。
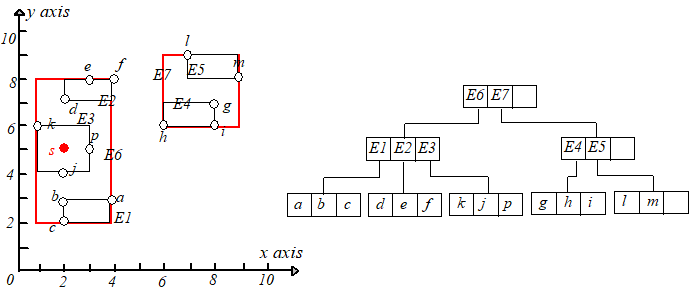
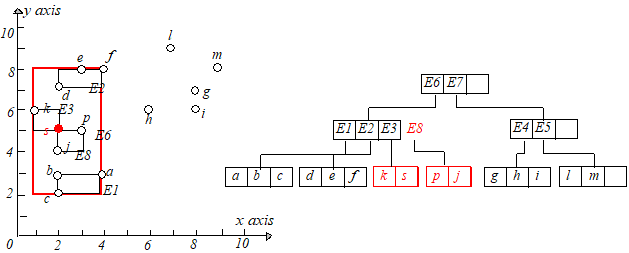
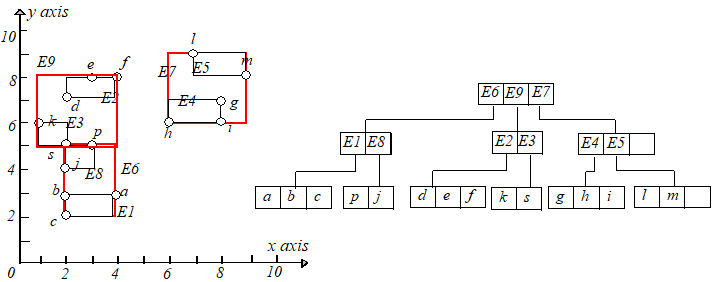
但是 $E8$ 和 $E1,E2,E3$ 放在一起又会时节点条目数超过 $M$,所以需要再进行节点分裂,根据最小 $MBR$ 原则,将 $E2,E3$ 放到一起,$E1,E8$
放到一起,调整 $E6.I$ 的大小使其适配节点 $E2,E3$,为节点 $E1,E8$ 创建一个新的条目 $E9$,插入到根节点,如下图所示:

2. 插入一棵 $R$ 树
插入一棵 $R$ 树其实插入的是 $R$ 树根节点所有条目所表示的矩形。和插入一个点一样,在选择条目的时候都是采用扩张最小代价原则。
不同的是:插入一个点,最终是一定会插入到叶子节点中,但是插入 $R$ 树的时候,由于 $R$ 树本身有高度,假设它的高度为 $H$,那么
该它会被插入到 $Level \; H$ 层。
举个例子,向树中插入 $E2$ 这课 $R$ 树,因为它的高度为 $2$,所以 $E2$ 会被插入到 $Level \; 2$。
R-tree 删除
从 $R$ 树中删除一个点,首先需要找到该点所在的叶子节点,通过判断点是否在条目所对应的矩形区域内来选择分支,直到找到叶子
节点,判断所要删除的点是否在该叶子节点内,如果在则删除,并调整父节点对应题目的矩形。删除之后,如果叶子节点剩余条目数过
少,即小于要求的最小值 $m$,则需要进行调整,令 $N$ 为条目数低于下限的叶子节点,调整步骤如下。
初始化一个用于存储被删除结点包含的条目的链表 $Q$。令 $P$ 为 $N$ 的父结点,$EN$ 为 $P$ 结点中存储的指向 $N$ 的条目。
因为 $N$ 含有条目数少于 $m$,于是从 $P$ 中删除 $EN$,并把结点 $N$ 中的条目添加入链表 $Q$ 中,然后输出节点 $N$。
往上层走,令 $N$ 等于 $P$,继续进行下溢判断,如果下溢,则将该节点中的每个条目加到 $Q$ 中,删除该结点和父节点中对应条目。
如果没有下溢,不要忘记调整祖父节点对应条目的矩形形状。
所有在 $Q$ 中的结点中的条目需要被重新插入。原来属于叶子结点的条目可以使用 Insert 操作进行重新插入,而那些属于非叶子结点
的条目必须插入删除之前所在层的结点,以确保它们所指向的子树还处于相同的层(相当于插入一棵 $R$ 树)。
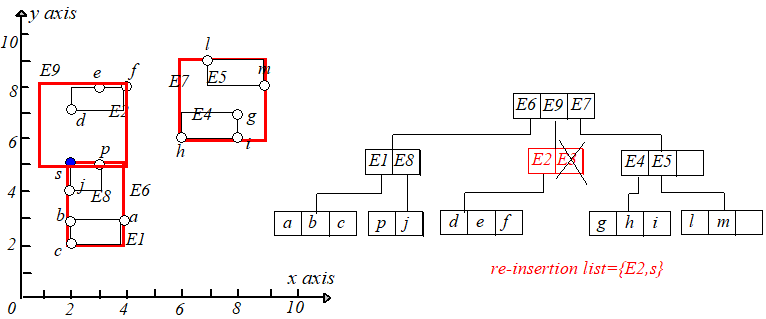
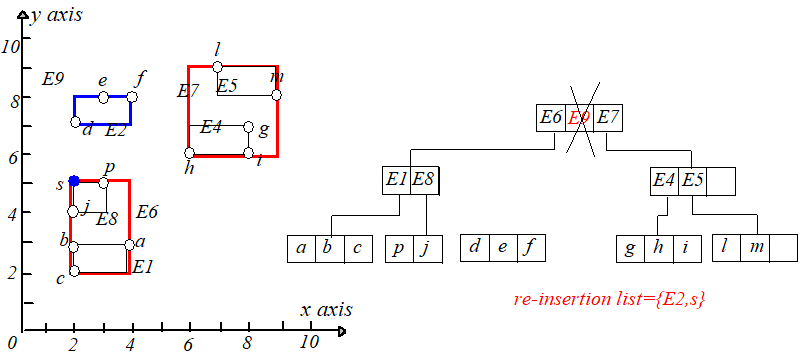
举个例子,删除点 $k(1,6)$,从根节点开始找,可以找到 $E3$,将其删除,但是下溢了。具体过程如下图:
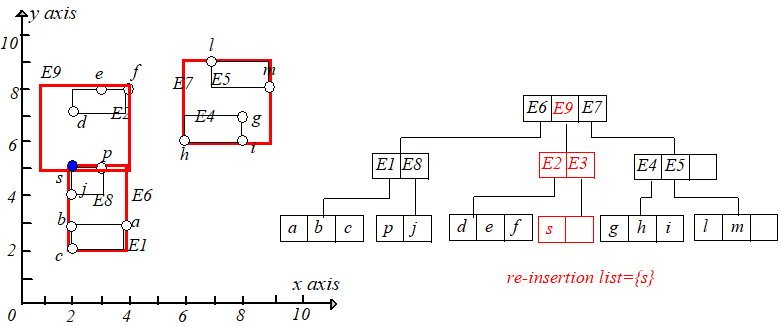
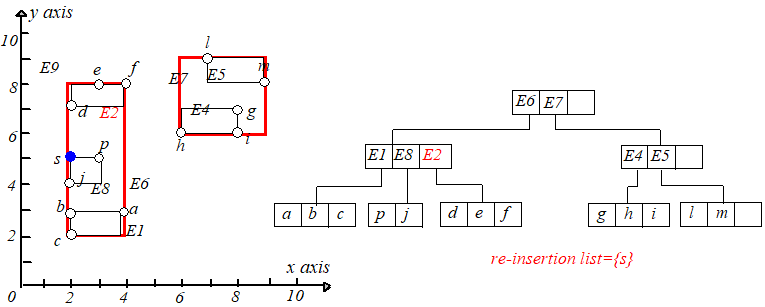
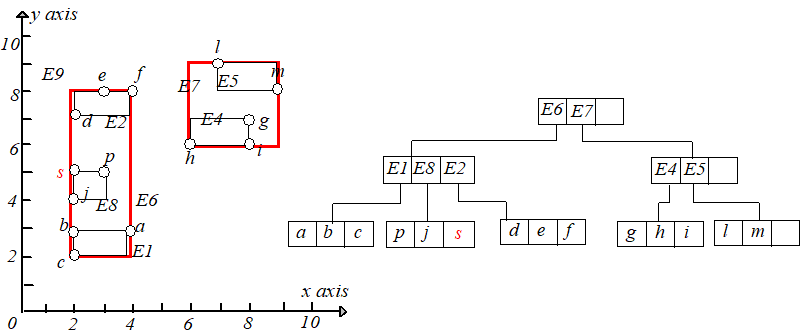
接下来将 $Q$ 中的项重新插入到 $R$ 树中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号