机器学习-聚类-谱聚类算法笔记
在学习谱聚类算法之前,首先复习一下:实对称阵的特征值是实数

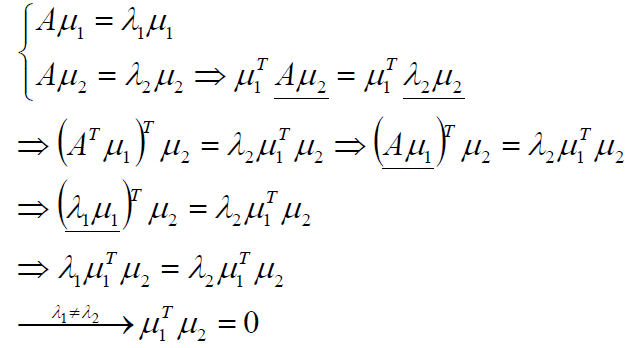
实对称阵不同特征值的特征向量正交
令实对称矩阵为A,其两个不同的特征值λ1λ2对应的特征向量分别是μ1μ2;
λ1λ2 μ1μ2都是实数或是实向量。
正式介绍谱聚类
谱和谱聚类
方阵作为线性算子,它的所有特征值的全体统称方阵的谱。
方阵的谱半径为最大的特征值
矩阵A的谱半径:(ATA)的最大特征值
谱聚类是一种基于图论的聚类方法,通过对样本数据的拉普拉斯矩阵的特征向量进行聚类,从而达到对样本数据聚类的目的。
谱分析的整体过程
1.给定一组数据x1,x2,...xn,记任意两个点之间的相似度(―距离”的减函数)为sij=<xi,xj>,形成相似度图(similarity graph):G=(V,E) 。如果xi和xj之间的相似度sij大于一定的阈值,那么,两个点是连接的,权值记做sij。
2.接下来,可以用相似度图来解决样本数据的聚类问题:找到图的一个划分,形成若干个组(Group),使得不同组之间有较低的权值,组内有较高的权值。
谱聚类一:无向权重图
由于谱聚类是基于图论的,因此我们首先温习下图的概念。对于一个图G,我们一般用点的集合V和边的集合E来描述。即为G(V,E)。其中V即为我们数据集里面所有的点(v1,v2,...vn)。对于V中的任意两个点,
可以有边连接,也可以没有边连接。我们定义权重wij为点vi和点vj之间的权重。由于我们是无向图,所以wij=wji。
对于有边连接的两个点vi和vj,wij>0,对于没有边连接的两个点vi和vj,wij=0。对于图中的任意一个点vi,它的度di定义为和它相连的所有边的权重之和,即

利用每个点度的定义,我们可以得到一个nxn的度矩阵D,它是一个对角矩阵,只有主对角线有值,对应第i行的第i个点的度数。
利用所有点之间的权重值,我们可以得到图的邻接矩阵W,它也是一个nxn的矩阵,第i行的第j个值对应我们的权重wij。
子图A的指示向量:

A和B是图G的不相交子图,则定义子图的连接权:

谱聚类二:相似度图G的建立方法
邻接矩阵W,它是由任意两点之间的权重值wij组成的矩阵。通常我们可以自己输入权重,但是在谱聚类中,我们只有数据点的定义,并没有直接给出这个邻接矩阵,那么怎么得到这个邻接矩阵呢?
基本思想是,距离较远的两个点之间的边权重值较低,而距离较近的两个点之间的边权重值较高,不过这仅仅是定性,我们需要定量的权重值。一般来说,我们可以通过样本点距离度量的相似矩阵S来获得邻接矩阵W。
构建邻接矩阵W的方法有三类。全连接法,ϵ-邻近法和K邻近法。
1)全连接法
全连接法构建的邻接矩阵W的所有点之间的权重值都大于0,可以选择不同的核函数来定义边权重,常用的有多项式核函数,高斯核函数和Sigmoid核函数。最常用的是高斯核函数RBF,此时相似矩阵和邻接矩阵相同:
![]()
在实际的应用中,使用全连接法来建立邻接矩阵中使用高斯径向核RBF是最普遍的。
2)对于ϵ-邻近法,它设置了一个距离阈值ϵ,然后用欧式距离sij度量任意两点xi和xj的距离。即相似矩阵的sij=||xi−xj||2, 然后根据sij和ϵ的大小关系,来定义邻接矩阵W如下:
![]()
从上式可见,两点间的权重要不就是ϵ,要不就是0,没有其他的信息了。距离远近度量很不精确,因此在实际应用中,我们很少使用ϵ-邻近法。
3)K邻近法,利用KNN算法遍历所有的样本点,取每个样本最近的k个点作为近邻,只有和样本距离最近的k个点之间的wij>0。但是这种方法会造成重构之后的邻接矩阵W非对称,我们后面的算法需要对称邻接矩阵。为了解决这种问题,一般采取下面两种方法之一:
第一种K邻近法是只要一个点在另一个点的K近邻中,则保留sij

第二种K邻近法是必须两个点互为K近邻中,才能保留sij

构建邻接矩阵W的方法总结
ε近邻图:ε=0.3,“月牙部分”非常紧的连接了,但“高斯部分”很多都没连接。当数据有不同的“密度”时,往往发生这种问题。
k近邻图:可以解决数据存在不同密度时有些无法连接的问题,甚至低密度的“高斯部分”与高密度的“月牙部分”也能够连接。同时,虽然两个“月牙部分”的距离比较近,但k近邻还可以把它们区分开。
互k近邻图:它趋向于连接相同密度的部分,而不连接不同密度的部分。这种性质介于ε近邻图和k近邻图之间。如果需要聚类不同的密度,这个性质非常有用。
全连接图:使用高斯相似度函数可以很好的建立权值矩阵。但缺点是建立的矩阵不是稀疏的。
总结:首先尝试使用k近邻图。
谱聚类三:拉普拉斯矩阵
拉普拉斯矩阵:L = D – W

拉普拉斯矩阵是半正定的,且对应的n个实数特征值都大于等于0,即0=λ1≤λ2≤...≤λn, 且最小的特征值为0。
拉普拉斯矩阵的定义:
计算点之间的邻接相似度矩阵W
1)若两个点的相似度值越大,表示这两个点越相似;
2)同时,定义wij=0表示vi,vj两个点没有任何相似性(无穷远)
W的第i行元素的和为vi的度。形成顶点度对角阵D
1)dii表示第i个点的度
2)除主对角线元素,D其他位臵为0
未正则的拉普拉斯矩阵:L=D-W
正则拉普拉斯矩阵
1) 对称拉普拉斯矩阵
![]()
2) 随机游走拉普拉斯矩阵
![]()
未正则拉普拉斯矩阵算法流程:
输入:n个点{pi},簇的数目k
计算n×n的相似度矩阵W和度矩阵D;
计算拉普拉斯矩阵L=D-W;
计算L的前k个特征向量u1,u2,...,uk;
将k个列向量u1,u2,...,uk组成矩阵U,U∈Rn×k;
对于i=1,2,...,n,令yi∈Rk是U的第i行的向量;
使用k-means算法将点(yi)i=1,2,...,n聚类成簇C1,C2,...Ck;
输出簇A1,A2,...Ak,其中,Ai={j|yj∈Ci}
随机游走拉普拉斯矩阵算法流程:
输入:n个点{pi},簇的数目k
计算n×n的相似度矩阵W和度矩阵D;
计算正则拉普拉斯矩阵Lrw=D-1(D-W);
计算Lrw的前k个特征向量u1,u2,...,uk;
将k个列向量u1,u2,...,uk组成矩阵U,U∈ Rn×k ;
对于i=1,2,...,n,令yi∈Rk是U的第i行的向量;
使用k-means算法将点(yi)i=1,2,...,n聚类成簇C1,C2,...Ck ;
输出簇A1,A2,...Ak,其中,Ai={j|yj∈Ci}
对称拉普拉斯矩阵算法流程:
输入:n个点{pi},簇的数目k
计算n×n的相似度矩阵W和度矩阵D;
计算正则拉普拉斯矩阵Lsym=D-1/2(D-W) D-1/2;
计算Lsym的前k个特征向量u1,u2,...,uk;
将k个列向量u1,u2,...,uk组成矩阵U,U∈Rn×k;
对于i=1,2,...,n,令yi∈Rk是U的第i行的向量;
对于i=1,2,...,n,将yi∈Rk依次单位化,使得|yi|=1;
使用k-means算法将点(yi)i=1,2,...,n聚类成簇C1,C2,...Ck;
输出簇A1,A2,...Ak,其中,Ai={j|yj∈Ci}
随机游走和拉普拉斯矩阵的关系:
图论中的随机游走是一个随机过程,它从一个顶点跳转到另外一个顶点。谱聚类即找到图的一个划分,使得随机游走在相同的簇中停留而几乎不会游走到其他簇。
转移矩阵:从顶点vi跳转到顶点vj的概率正比于边的权值wij
![]()
关于谱聚类的思考
谱聚类中的K如何确定?
![]()
最后一步K-Means的作用是什么?
答:目标函数是关于子图划分指示向量的函数,该向量的值根据子图划分确定,是离散的。该问题是NP的,转换成求连续实数域上的解,最后用K-Means算法离散化。
未正则/对称/随机游走拉普拉斯矩阵,首选哪个?
答:随机游走拉普拉斯矩阵
谱聚类可以用切割图/随机游走/扰动论等解释。
对于部分样本的标记给定,而大多数样本的标记未知的情形,是半监督学习问题。
标签传递算法(Label Propagation Algorithm,LPA),将标记样本的标记通过一定的概率传递给未标记样本,直到最终收敛。
谱聚类算法总结
谱聚类算法是一个使用起来简单,但是讲清楚却不是那么容易的算法,它需要你有一定的数学基础。如果你掌握了谱聚类,相信你会对矩阵分析,图论有更深入的理解。同时对降维里的主成分分析也会加深理解。
下面总结下谱聚类算法的优缺点。
谱聚类算法的主要优点有:
1)谱聚类只需要数据之间的相似度矩阵,因此对于处理稀疏数据的聚类很有效。这点传统聚类算法比如K-Means很难做到
2)由于使用了降维,因此在处理高维数据聚类时的复杂度比传统聚类算法好。
谱聚类算法的主要缺点有:
1)如果最终聚类的维度非常高,则由于降维的幅度不够,谱聚类的运行速度和最后的聚类效果均不好。
2) 聚类效果依赖于相似矩阵,不同的相似矩阵得到的最终聚类效果可能很不同。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号