

维比特算法
维比特算法(viterbi algorithm)算法可用于求解篱笆图(lattice,离散数学中的格)的最短路径问题。
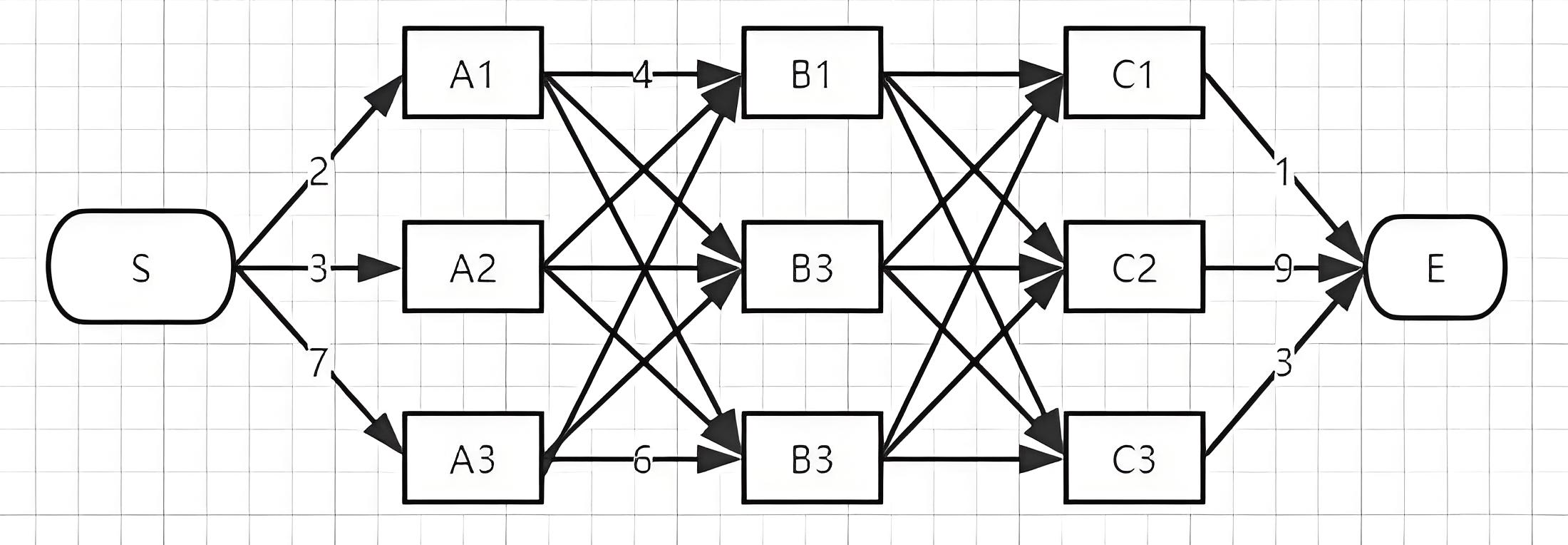
算法的思路与多段图是类似的,将一个格分为多组的节点,图的节点按列组织,每列的节点数量可以不一样,每一列的节点只能和相邻列的节点相连,不能跨列相连,节点之间有着不同的距离,之后逐层迭代。
对于多段图算法中,我们可以求解出最短的距离的值,那么我们怎么知道最短路径具体是那一条呢。在维比特算法中的做法是,删除掉不可能是答案的路径,留下可能是答案的路径。
维比特算法是典型的动态规划算法,也就是说,我们在计算出最短路径之前,一定已经计算出了从起点到终点前一组节点的最短路径,所以我们只需要在计算部分最短路径时(子问题),删除掉经过该节点的非最短路径的边,因为假如最终的最短路径经过该点,那么起点到该店的最短路径一定是最终解的子路径,该点的非最短路径的边不可能是最终解的边。
例如,起点到B1点有三条路径S->A1->B1,S->A2->B1,S->A3->B1,经过计算可以发现S->A1->B1是起点到B1的最短路径,那么我们可以删除边A2->B1,A3->B1,以此类推,我们得到的状态转移方程如下:
假设Path[i]记录的是从起点到节点v[i]的最短路径,那么
Path[i]=min(Path[r]+cost(r,i)),其中(r,i)∈E(G)。
我们可以看出假如我们不删除不可能为最终解的边,也可以采用一个容器来记录起点到每一个点的最短路径。
综上,维比特算法中最经典的部分就是利用了解决子问题之后留下的解(用容器记录或者删除不可能的边),从而减少不必要的计算(相对于遍历所有可能路径的穷举法),降低时间复杂度,最短路径问题满足最优化原理和无后效性,即全局最优则局部也是最优。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号