玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
本文介绍X-CTR100控制器 板载加速度陀螺仪MPU6050的使用。
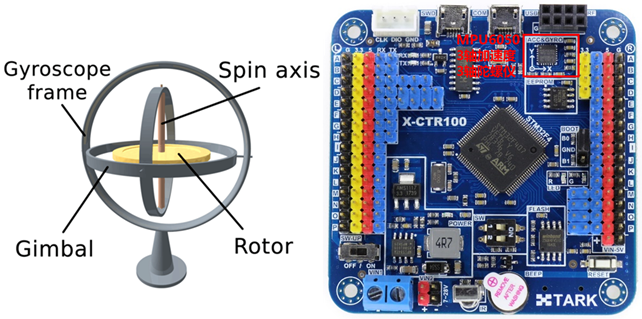
X-CTR100集成三轴加速度三轴陀螺仪MEMS芯片MPU6050,使X-CTR100具有IMU(Inertial measurement unit)功能,通过姿态解算可获得X-CTR100姿态角,用于自平衡车、四旋翼飞行器、3D鼠标等作品设计。
原理
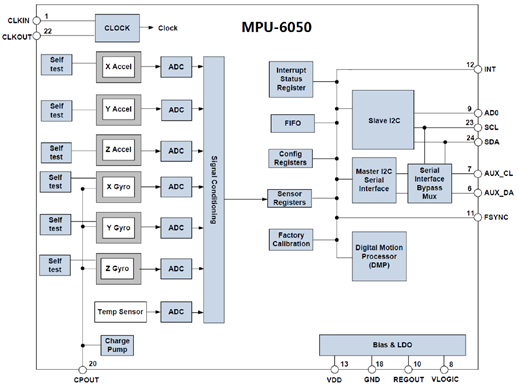
MPU6050是InvenSense公司推出的整合性6轴运动处理组件,相较于独立方案免除了组合陀螺仪与加速器时之轴间差的问题,内部整合3轴陀螺仪和3轴加速度传感器,并且具有数字运动处理引擎(DMP:Digital Motion Processor),方便实现姿态解算,降低主处理器运算负荷。MPU6050系统框图如下图所示。
MPU6050主要参数特性见下表,详细特性请参考芯片资料。
参数 | 说明 |
供电电压 | 3.3V-5V |
功耗 | 500uA~3.9mA@3.3V |
工作温度 | |
通信接口 | I2C协议(最高频率400K) |
测量 | 加速度3轴 陀螺仪3轴 |
ADC分辨率 | 16位 |
陀螺仪量程 | ±250 º/s 、±500 º/s 、±1000 º/s、±2000 º/s |
陀螺仪最高分辨率 | 131 LSB/(º/s) |
加速度量程 | ±2g、±4g、±8g、±16g |
加速度最高分辨率 | 16384 LSB/g |
温度量程 | -40~+85℃ |
温度分辨率 | 340 LSB/℃ |
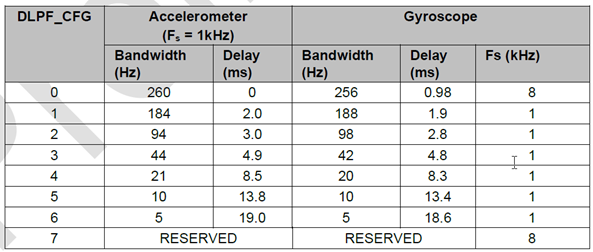
MPU6050集成数字低通滤波器DLPF,通过低通滤波器可滤除高频噪声,获取更平滑的数据曲线。低通滤波器设置位DLPF_CFG[2:0],滤波器设置及对应的特性如下表所示。
X-CTR100坐标定义,MPU6050芯片坐标定义如下图左图所示,MPU6050芯片在X-CTR100上的安装方向如下右图所示,使用时请注意坐标系定义。

例程 l 数据读取
初始化MPU6050,采集3轴加速度、3轴陀螺仪、温度传感器数据并输出显示。
硬件说明
硬件资源:
- 串口UART1
- 板载资源MPU6050
硬件连接:
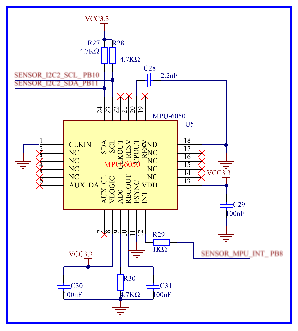
X-CTR100集成三轴加速度、三轴陀螺仪一体芯片MPU6050,可实现IMU功能,通过IIC2接口控制,MPU6050中断输出连接到PB8引脚。使用IIC2接口扩展其它功能模块时,请注意地址是否冲突。
软件生态
X-SOFT软件生态,X-API文件如下。
ax_mpu6050.c——X-CTR100 板载 MPU6050加速度陀螺仪源文件
ax_ mpu6050.h——X-CTR100 板载 MPU6050加速度陀螺仪头文件
操作函数如下:
void AX_MPU6050_Init(void); //MPU6050传感器初始化
//设置参数函数 void AX_MPU6050_SetAccRange(uint8_t range); //MPU6050设置加速度量程 void AX_MPU6050_SetGyroRange(uint8_t range); //MPU6050设置陀螺仪量程 void AX_MPU6050_SetGyroSmplRate(uint16_t smplrate); //MPU6050设置陀螺仪采样率 void AX_MPU6050_SetDLPF(uint8_t bandwidth); //MPU6050设置低通滤波器带宽
//获取数据函数 float AX_MPU6050_GetTempValue(void); //MPU6050获取传感器温度值 int16_t AX_MPU6050_GetAccData_X(void); //MPU6050获取X轴加速度寄存器输出值 int16_t AX_MPU6050_GetAccData_Y(void); //MPU6050获取Y轴加速度寄存器输出值 int16_t AX_MPU6050_GetAccData_Z(void); //MPU6050获取Z轴加速度寄存器输出值 void AX_MPU6050_GetAccData(int16_t *pbuf); //MPU6050获取三轴加速度寄存器输出值 int16_t AX_MPU6050_GetGyroData_X(void); //MPU6050获取X轴陀螺仪寄存器输出值 int16_t AX_MPU6050_GetGyroData_Y(void); //MPU6050获取Y轴陀螺仪寄存器输出值 int16_t AX_MPU6050_GetGyroData_Z(void); //MPU6050获取Z轴陀螺仪寄存器输出值 void AX_MPU6050_GetGyroData(int16_t *pbuf); //MPU6050获取三轴轴陀螺仪寄存器输出值 |
设置项宏定义:
//加速度量程 #define AX_ACC_RANGE_2G 0 //2g #define AX_ACC_RANGE_4G 1 //4g #define AX_ACC_RANGE_8G 2 //8g #define AX_ACC_RANGE_16G 3 //16g
//陀螺仪量程 #define AX_GYRO_RANGE_250 0 //250度/秒 #define AX_GYRO_RANGE_500 1 //500度/秒 #define AX_GYRO_RANGE_1000 2 //1000度/秒 #define AX_GYRO_RANGE_2000 3 //2000度/秒
//带宽 #define AX_DLPF_ACC184_GYRO188 1 //加速度带宽184Hz 陀螺仪带宽188Hz #define AX_DLPF_ACC94_GYRO98 2 //加速度带宽94Hz 陀螺仪带宽98Hz #define AX_DLPF_ACC44_GYRO42 3 //加速度带宽44Hz 陀螺仪带宽42Hz #define AX_DLPF_ACC21_GYRO20 4 //加速度带宽21Hz 陀螺仪带宽20Hz #define AX_DLPF_ACC10_GYRO10 5 //加速度带宽10Hz 陀螺仪带宽10Hz #define AX_DLPF_ACC5_GYRO5 6 //加速度带宽5Hz 陀螺仪带宽5Hz |
软件说明
本例程AX_MPU6050_Init()完成MPU初始化,并设置陀螺仪量程250deg/s,加速计量程2g、陀螺采样率200Hz、低通滤波带宽陀螺98Hz、加速度94Hz。然后调用单轴读取函数分别读取每个轴数据,并显示。最后while循环中集中读取加速度、陀螺仪、温度数据,并显示。主程序代码如下。
int main(void) { float tmp; int16_t acel[3]; int16_t gyro[3];
//X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 MPU6050运动传感器例程***\r\n\r\n");
//模块初始化及配置 AX_MPU6050_Init(); //MPU6050初始化 AX_MPU6050_SetAccRange(AX_ACC_RANGE_2G); //设置加速度量程 AX_MPU6050_SetGyroRange(AX_GYRO_RANGE_250); //设置陀螺仪量程 AX_MPU6050_SetGyroSmplRate(200); //设置陀螺仪采样率 AX_MPU6050_SetDLPF(AX_DLPF_ACC94_GYRO98); //设置低通滤波器带宽
//X-API测试:分别读取加速度、陀螺仪每个轴数据 printf("*分别读取加速度、陀螺仪每轴数据\r\n"); acel[0] = AX_MPU6050_GetAccData_X(); acel[1] = AX_MPU6050_GetAccData_Y(); acel[2] = AX_MPU6050_GetAccData_Z(); gyro[0] = AX_MPU6050_GetGyroData_X(); gyro[1] = AX_MPU6050_GetGyroData_Y(); gyro[2] = AX_MPU6050_GetGyroData_Z();
printf("*加速度:%8d %8d %8d", acel[0], acel[1], acel[2]); printf(" 陀螺仪:%8d %8d %8d \r\n", gyro[0], gyro[1], gyro[2]);
//X-API测试:循环读取加速度、陀螺仪、温度数据 printf("*读取加速度、陀螺仪、温度数据\r\n");
while (1) { AX_MPU6050_GetAccData(acel); //读取三轴加速度数据 printf("*加速度:%8d %8d %8d", acel[0], acel[1], acel[2]);
AX_MPU6050_GetGyroData(gyro); //读取三轴陀螺仪数据 printf(" 陀螺仪:%8d %8d %8d", gyro[0], gyro[1], gyro[2]);
tmp = AX_MPU6050_GetTempValue(); //读取温度传感器数据 printf(" 温度:%8.2f\r\n", tmp);
AX_Delayms(1000); AX_LEDG_Toggle(); } } |
实现效果
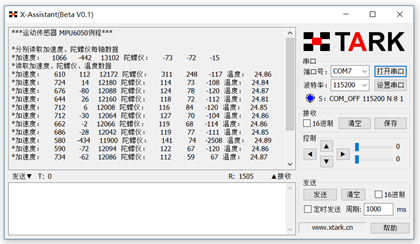
上电MPU初始化完成后,即可循环输出3轴加速度、3轴陀螺仪、温度传感器数据。可缓慢晃动X-CTR100,观察数据变化。由于传感器未校准,存在数据偏差为正常现象,校准后即可修正,运行效果如下图所示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号