
目标检测论文解读9——R-FCN
背景
基于ResNet 101的Faster RCNN速度很慢,本文通过提出Position-sensitive score maps(位置敏感分值图)来给模型加速。
方法
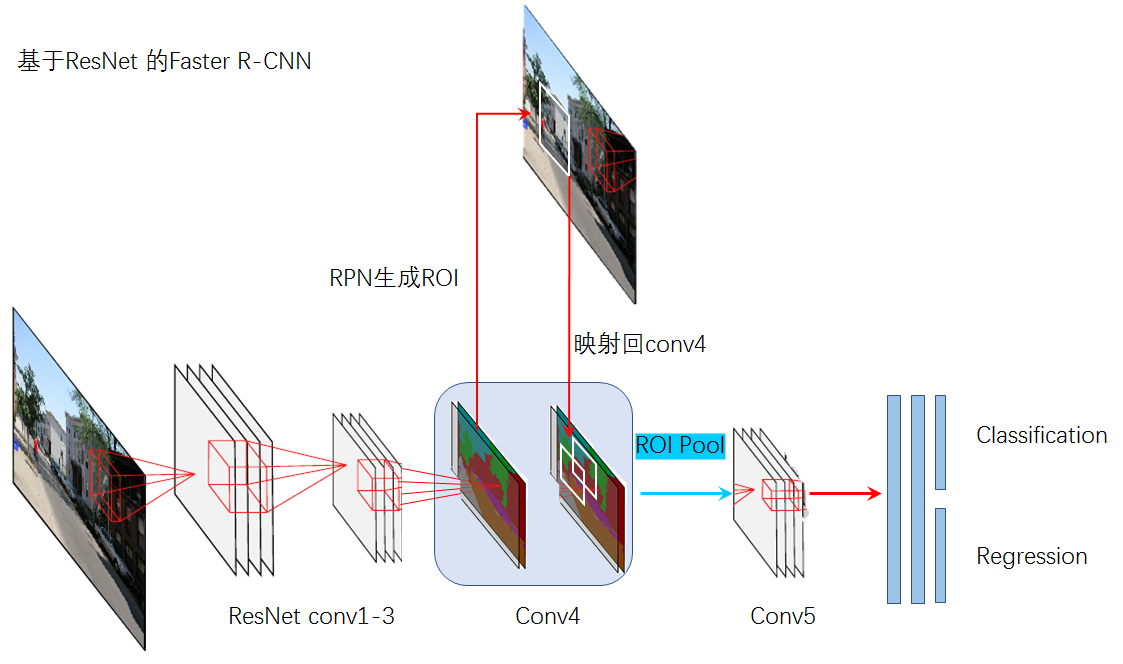
首先分析一下,为什么基于ResNet 101的Faster R-CNN很慢?
其实主要的原因是ROI Pooling层后面的Conv5无法共享计算,每一个RoI都要计算一次,一次检测RoI可能有几百个,计算量巨大。
我们已经知道Conv层的作用是提取特征,那为什么不跟把Conv5放到RoI Pooling前面,让RoI映射到Conv5输出的feature map呢?
这是因为Conv5会使feature map进一步压缩,w*h变小,feature map小了,位置敏感性显然会降低,从而检测的结果不准。
于是,作者提出了一种兼顾速度和准度的结构。
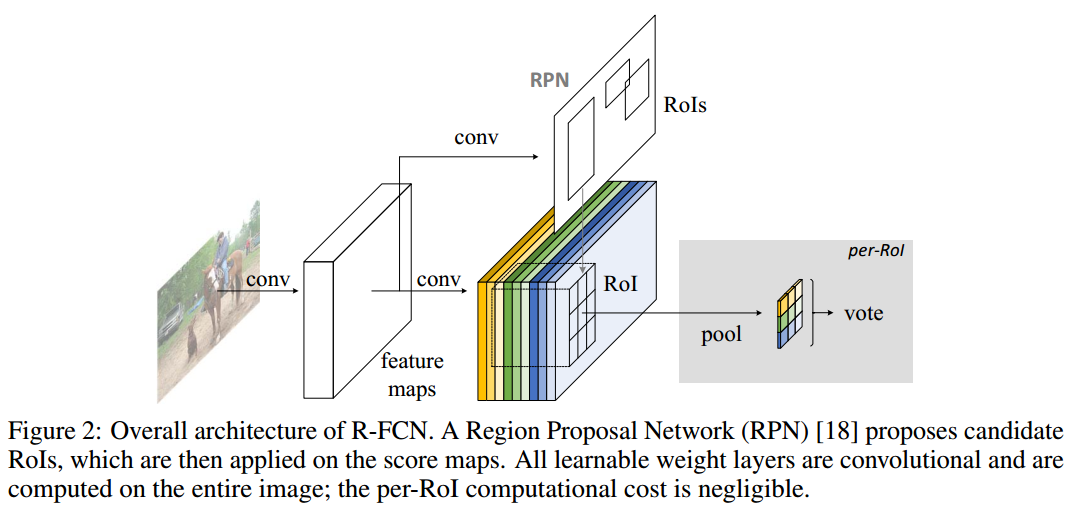
观察上面的模型,我们可以看到,在RoI pooling层后面用来提取特征的Conv层都放到前面了,所以共享了计算,速度加快。
同时,作者提出一种Position-sensitive score maps的方法来解决位置信息丢失,大致是这样的。
原图片经过一系列的Conv层,输出一个channel为k*k*(C+1)的feature map,k=3,代表一张图片的九宫格各位置,C为类别数。可以看到feature map的每一个点,都是k*k*(C+1)-d的feature vector,其中包含了这个点在某位置且为某类的得分信息。
RPN提出的RoI,映射到feature map中,也被分为k*k个bin。
接下来,进行一次Position-sensitive RoI pooling(位置敏感池化)操作。步骤如下:找到一个左上角的bin,然后找到他所对应的(C+1)-d的类别得分信息,可以对w*h的bin的类别信息进行平均池化,得到一个(C+1)的类别信息;其他8个位置也按照同样步骤。
经过这一步,就能得到一个k*k*(C+1)的feature map,再对k*k个(C+1)的vector平均一次(论文用的方法),得到(C+1)的vector,softmax返回一个概率最大的类别就行了。
总结
可以看到,之所以作者的方法之所以位置精度高,主要是因为他把问题从给一个RoI分类转变成了给一个RoI的九个位置分类,从而提高了位置敏感度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号