
I2C通讯协议学习笔记
文章转载至I2C
如有侵权,请联系删除
1.1. I2C 协议简介
I2C 通讯协议 (Inter - Integrated Circuit) 是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单, 可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路 (IC) 间的通讯。
下面分别对 I2C 协议的物理层及协议层进行讲解
1.1.1. I2C 物理层
I2C通讯设备间的常用连接方式见图1 - 1,

图1 - 1常见的I2C通讯系统
它的物理层有如下特点:
-
它是一个支持设备的总线。“总线”指多个设备共用的信号线。在一个 I2C 通讯总线中,可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。
-
一个 I2C 总线只使用两条总线线路,一条双向串行数据线 (SDA) ,一条串行时钟线 (SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
-
每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
-
总线通过上拉电阻接到电源。当 I2C 设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
-
多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
-
具有三种传输模式:标准模式传输速率为 100kbit/s ,快速模式为 400kbit/s ,高速模式下可达 3.4Mbit/s,但目前大多 I2C 设备尚不支持高速模式。
-
连接到相同总线的 IC 数量受到总线的最大电容 400pF 限制。
1.1.2. 协议层
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节
1.1.2.1. I2C 基本读写过程
先看看 I2C 通讯过程的基本结构,它的通讯过程见图1 - 2,1 - 3,1 - 4。
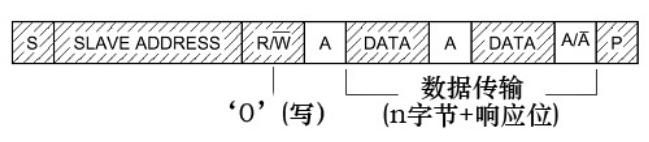
图1 - 2主机写数据到从机
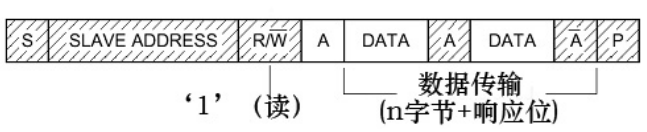
图1 - 3主机由从机中读数据

图1 - 4 I2C通讯复合格式
图例:
数据由主机传输至从机
数据由从机传输至主机
S :传输开始信号
SLAVE_ADDRESS: 从机地址
R/W- :传输方向选择位,1 为读,0 为写
A/A- :应答 (ACK) 或非应答 (NACK) 信号
P :停止传输信号


这些图表示的是主机和从机通讯时,SDA 线的数据包序列。
其中 S 表示由主机的 I2C 接口产生的传输起始信号 (S),这时连接到 I2C 总线上的所有从机都会接收到这个信号。
起始信号产生后,所有从机就开始等待主机紧接下来广播的从机地址信号 (SLAVE_ADDRESS)。在I2C 总线上, 每个设备的地址都是唯一的,当主机广播的地址与某个设备地址相同时,这个设备就被选中了, 没被选中的设备将会忽略之后的数据信号。根据 I2C 协议,这个从机地址可以是 7 位或 10 位。
在地址位之后,是传输方向的选择位,该位为 0 时,表示后面的数据传输方向是由主机传输至从机,即主机向从机写数据。该位为 1 时,则相反,即主机由从机读数据。
从机接收到匹配的地址后,主机或从机会返回一个应答 (ACK) 或非应答 (NACK) 信号,只有接收到应答信号后,主机才能继续发送或接收数据
写数据 若配置的方向传输位为“写数据”方向,即第一幅图的情况,广播完地址,接收到应答信号后, 主机开始正式向从机传输数据 (DATA),数据包的大小为 8 位,主机每发送完一个字节数据, 都要等待从机的应答信号 (ACK),重复这个过程,可以向从机传输 N 个数据,这个 N 没有大小限制。 当数据传输结束时,主机向从机发送一个停止传输信号 (P),表示不再传输数据。
读数据 若配置的方向传输位为“读数据”方向,即第二幅图的情况,广播完地址,接收到应答信号后,从机开始向主机返回数据 (DATA), 数据包大小也为 8 位,从机每发送完一个数据,都会等待主机的应答信号 (ACK),重复这个过程, 可以返回 N 个数据,这个 N 也没有大小限制。当主机希望停止接收数据时,就向从机返回一个非应答信号 (NACK),则从机自动停止数据传输。
读和写数据 除了基本的读写,I2C 通讯更常用的是复合格式,即第三幅图的情况,该传输过程有两次起始信号 (S)。一般在第一次传输中,主机通过 SLAVE_ADDRESS 寻找到从设备后, 发送一段“数据”,这段数据通常用于表示从设备内部的寄存器或存储器地址 (注意区分它与 SLAVE_ADDRESS 的区别);在第二次的传输中, 对该地址的内容进行读或写。也就是说,第一次通讯是告诉从机读写地址,第二次则是读写的实际内容。
1.1.2.2. 通讯的起始和停止信号
前文中提到的起始 (S) 和停止 (P) 信号是两种特殊的状态,见图1 - 5。当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。当 SCL 是高电平时 SDA 线由低电平向高 电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
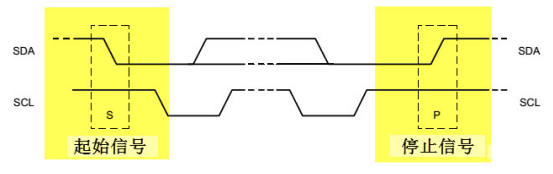
图1 - 5起始和停止信号
1.1.2.3. 数据有效性
I2C 使用 SDA 信号线来传输数据,使用 SCL 信号线进行数据同步。见图 23_6。SDA 数据线在SCL 的每个时钟周期传输一位数据。 传输时,SCL 为高电平的时候 SDA 表示的数据有效,即此时的 SDA 为高电平时表示数据“1”,为低电平时表示数据“0”。当 SCL 为低电平时, SDA 的数据无效,一般在这个时候 SDA 进行电平切换,为下一次表示数据做好准备。

图1 - 6数据有效性
每次数据传输都以字节为单位,每次传输的字节数不受限制
1.1.2.4. 地址及数据方向
I2C 总线上的每个设备都有自己的独立地址,主机发起通讯时,通过 SDA 信号线发送设备地址(SLAVE_ADDRESS) 来查找从机。 I2C 协议规定设备地址可以是 7 位或 10 位,实际中 7 位的地址应用比较广泛。紧跟设备地址的一个数据位用来表示数据传输方向, 它是数据方向位 (R/),第 8位或第 11 位。数据方向位为“1”时表示主机由从机读数据,该位为“0”时表示主机向从机写数据。见图1 - 7。

图1 - 7 设备地址 (7 位) 及数据传输方向
读数据方向时,主机会释放对 SDA 信号线的控制,由从机控制 SDA 信号线,主机接收信号,写数据方向时,SDA 由主机控制,从机接收信号。
1.1.2.5. 响应
I2C 的数据和地址传输都带响应。响应包括“应答 (ACK)”和“非应答 (NACK)”两种信号。作为数据接收端时,当设备 (无论主从机) 接收到 I2C 传输的一个字节数据或地址后, 若希望对方继续发送数据,则需要向对方发送“应答 (ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输, 则向对方发送“非应答 (NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。见图1 - 8。

图1 - 8 响应与非响应信号
传输时主机产生时钟,在第 9 个时钟时,数据发送端会释放 SDA 的控制权,由数据接收端控制SDA,若 SDA 为高电平,表示非应答信号 (NACK),低电平表示应答信号 (ACK)。
STM32 可以在硬件层面和软件层面分别实现 I²C 通信
1.2. 硬件层面实现 I2C
在硬件层面,STM32 内置了 I²C 控制器,利用硬件来处理 I²C 的时序、数据传输等操作。这是最常用且可靠的方式,因为硬件可以高效地处理时序,避免 CPU 占用。
1.2.1 硬件实现步骤
-
配置 I²C 引脚 (
SCL和SDA为双向引脚,带有上拉电阻)。 -
配置 I²C 控制器 (
I2C1,I2C2等)。 -
使用
HAL_I2C_Init()初始化 I²C。 -
使用
HAL_I2C_Master_Transmit()和HAL_I2C_Master_Receive()进行数据传输。
1.2.2 硬件实现代码
#include "stm32f4xx_hal.h"
// I2C1 句柄
I2C_HandleTypeDef hi2c1;
// I2C 初始化函数
void I2C_Init(void) {
__HAL_RCC_I2C1_CLK_ENABLE(); // 启用 I2C1 时钟
// 配置 I2C1 的参数
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000; // 设置 I²C 时钟频率:100 kHz
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0x00; // 设置 I²C 主设备地址
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 设置 7 位地址模式
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
// 初始化 I²C1
HAL_I2C_Init(&hi2c1);
}
// 向 I2C 从设备写数据
void I2C_Write(uint8_t address, uint8_t* data, uint16_t size) {
HAL_I2C_Master_Transmit(&hi2c1, address, data, size, 1000); // 发送数据到指定地址
}
// 从 I2C 从设备读数据
void I2C_Read(uint8_t address, uint8_t* data, uint16_t size) {
HAL_I2C_Master_Receive(&hi2c1, address, data, size, 1000); // 从指定地址接收数据
}
int main(void) {
HAL_Init(); // HAL 库初始化
I2C_Init(); // I2C 初始化
uint8_t data[] = {0x01, 0x02, 0x03}; // 要写入的数据
I2C_Write(0xA0, data, sizeof(data)); // 向地址为 0xA0 的设备发送数据
uint8_t receivedData[3]; // 用于接收数据
I2C_Read(0xA0, receivedData, 3); // 从地址为 0xA0 的设备读取数据
while (1) {
// 主循环
}
}
以上代码展示了在 STM32F4 系列 MCU 上,如何配置 I²C1 进行通信(主机模式)。
1.2.3 硬件调试方法
-
波形分析: 使用示波器或者逻辑分析仪监控 I²C 总线的时序(SDA 和 SCL 信号),确保时序正常。
-
I²C 扫描工具: 使用工具如 I2C Scanner(可以通过 STM32 的串口调试)扫描总线上的设备,确保设备地址正确响应。
-
地址确认: 检查从设备的地址是否设置正确,主机与从设备之间的通信是否匹配。
-
错误处理: 使用
HAL_I2C_ErrorCallback()函数捕获和调试错误。
1.3. 软件层面实现 I2C
在没有硬件支持的情况下,或者想要完全控制时序,我们可以通过 GPIO 模拟 I²C 时序,这就是 软件模拟 I²C(bit-banging)。
1.3.1 软件实现步骤
-
通过配置两个 GPIO 引脚(SDA 和 SCL)来模拟 I²C 时序。
-
手动控制 SDA 和 SCL 的电平状态,通过延时来模拟时钟。
-
逐位传输数据。
1.3.2 .软件实现代码
#define SDA_PIN 4
#define SCL_PIN 5
void I2C_Start() {
HAL_GPIO_WritePin(GPIOA, SDA_PIN, GPIO_PIN_RESET); // 拉低 SDA
HAL_GPIO_WritePin(GPIOA, SCL_PIN, GPIO_PIN_RESET); // 拉低 SCL
HAL_Delay(1); // 延时
HAL_GPIO_WritePin(GPIOA, SCL_PIN, GPIO_PIN_SET); // 拉高 SCL,开始时钟
}
void I2C_Stop() {
HAL_GPIO_WritePin(GPIOA, SDA_PIN, GPIO_PIN_RESET); // 拉低 SDA
HAL_GPIO_WritePin(GPIOA, SCL_PIN, GPIO_PIN_SET); // 拉高 SCL
HAL_Delay(1); // 延时
HAL_GPIO_WritePin(GPIOA, SDA_PIN, GPIO_PIN_SET); // 拉高 SDA,停止信号
}
void I2C_Write(uint8_t data) {
for (int i = 7; i >= 0; i--) {
HAL_GPIO_WritePin(GPIOA, SDA_PIN, (data >> i) & 0x01); // 写每一位
HAL_GPIO_WritePin(GPIOA, SCL_PIN, GPIO_PIN_SET); // 拉高 SCL
HAL_Delay(1); // 延时
HAL_GPIO_WritePin(GPIOA, SCL_PIN, GPIO_PIN_RESET); // 拉低 SCL
HAL_Delay(1); // 延时
}
}
int main(void) {
HAL_Init();
// 配置 SDA 和 SCL 引脚为输出
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = (1 << SDA_PIN) | (1 << SCL_PIN);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
I2C_Start();
I2C_Write(0xA0); // 向 I2C 地址 0xA0 发送数据
I2C_Stop();
while (1) {
// 主循环
}
}
1.3.3 软件调试方法
-
时序监控: 使用逻辑分析仪或示波器,监控 SDA 和 SCL 引脚,确保时序没有错误。
-
查看通信结果: 检查接收到的数据,确保没有位错误,特别是 ACK/NACK 信号是否正确。
-
通过串口调试: 在 I²C 发送前后,可以使用串口输出调试信息,确认数据是否正确发送。
1.4. 调试 I²C 是否成功通讯
不管是硬件还是软件实现,调试 I²C 通信是非常重要的,下面是一些通用的调试方法:
①波形检查:
-
使用 逻辑分析仪 或 示波器 检查 I²C 总线上的时序(SDA 和 SCL)。
-
确保 SCL 时钟和 SDA 数据的时序符合 I²C 标准:
-
Start Condition:SDA 拉低时 SCL 拉高。
-
Stop Condition:SDA 拉高时 SCL 拉高。
-
Data:每个数据位的传输有相应的时钟周期。
-
②I²C 地址扫描:
-
使用一个 I2C 扫描工具,查看 I²C 总线是否有响应的设备。
-
常见的 I²C 扫描工具通过主机发送设备地址,并监听返回的 ACK 信号来确认设备是否在线。
③错误处理:
-
在 STM32 的 HAL 库中,使用
HAL_I2C_ErrorCallback()函数来捕获 I²C 错误并进行调试。 -
检查 超时错误、校验错误 等。
④通信回显:
-
发送数据后立即读取,比较发送和接收的数据是否匹配,确保双向通信正常。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号