第一次作业:深度学习基础
1. 视频学习
1.1 绪论
- 什么是人工智能
使一部机器像人一样进行感知、认知、决策、执行的人工程序或系统。 - 图灵测试
人机测试,判断是人还是机器在操作。 - 机器学习 建立决策树,对输入的测试内容进行标注,让其自动学习;当输入一个当内容,自动进行分类
基于数据自动学习
减少人工复杂工作,但结果可能不易解释
提高信息处理的效率,且准确率较高
来源于真实数据,减少人工规则主观性,可信度高模型分类
模型分类
数据标记
- 监督学习模型:输入样本具有标记,从数据中学习标记分界面,适用于预测数据标记
- 无监督学习模型:输入样本没有标记,从数据中学习模式,适用于描述数据
- 半监督学习:部分数据标记已知
- 强化学习:数据标记未知,但知道与输出目标相关的反馈
数据分布
- 参数模型:对数据分布进行假设,待求解的数据模式/映射可以用一组有限且固定数目的参数进行刻画
- 非参数模型:不对数据分布进行假设,数据的所有统计特征都来源于数据本身
建模对象
- 生成模型:对输入和输出的联合分布P(X,Y)建模;从数据中先学习到X和Y的联合分布,然后通过贝叶斯公式求的P(Y|X)
- 判别模型:对已知输入X条件下输出Y的条件分布P(Y|X)建模;直接学习P(Y|X),输入X,直接预测Y
1.2 深度学习概述
- M-P神经元
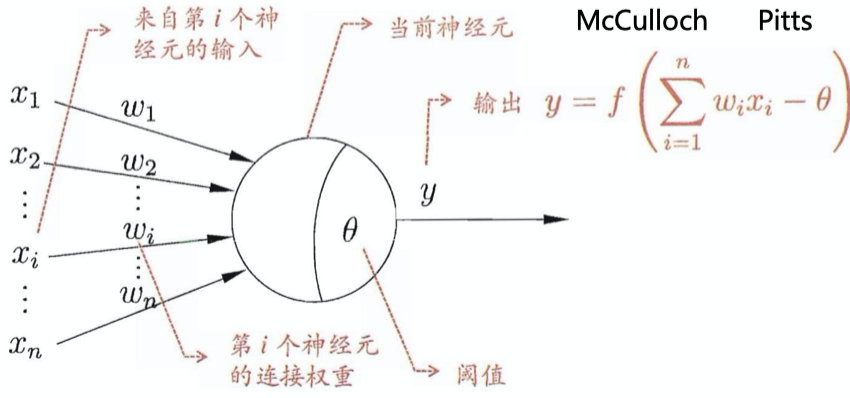
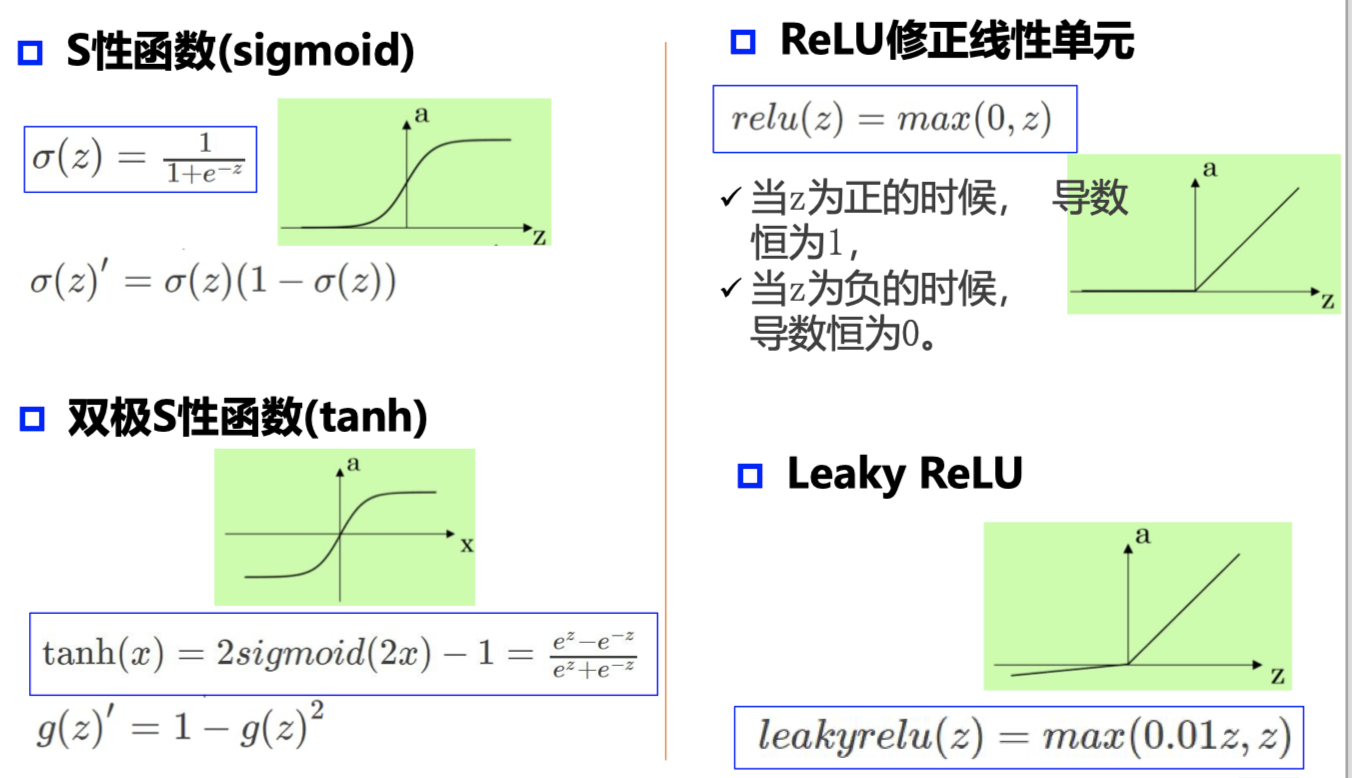
- 激活函数
输入超过阈值,神经元被激活,但不一定传递
没有激活函数相当于矩阵相乘;每一层相当于一个矩阵,矩阵相乘仍为矩阵,即多层和一层一样
- 梯度和梯度下降
参数沿负梯度方向更新可以使函数值下降,但可能会陷入局部极值点,无法找到全局的极值点(与初始点位置有关)
深度学习使用两个优化器:Adam 和 SGD 一般来说,使用 Adam 就可以,效果会比较好
- 自编码器(autoencoder)
假设输出与输入相同(target=input),是一种 尽可能复现输入信号的神经网络.将input输入一个encoder编码器,就会得到一个code;加一个decoder解码器,输出信息。
通过调整encoder和decoder的参数,使得重构误差最小
没有额外监督信息: 无标签数据,误差的来源是直接重构后 信号与原输入相比得到
- 解决梯度消失

1.3 pytorch 基础
结合2.2进行练习
2 代码练习
2.1 Python中的图像处理
2.1.1 下载并显示图像
plt.subplot(121) #1代表行,2代表列,所以一共有2个图,1代表此时绘制第二个图。 plt.imshow(colony[:,:,:]) plt.title('3-channel image') plt.axis('off') #不显示坐标尺寸
2.1.2 读取并改变图像像素值
# Get the pixel value at row 10, column 10 on the 10th row and 20th column camera = data.camera()#灰度“camera”图像。通常用于分割和去噪示例。 print(camera[10, 20]) # Set a region to black camera[30:100, 10:100] = 0 plt.imshow(camera, 'gray') # Set the first ten lines to black camera = data.camera() camera[:10] = 0 plt.imshow(camera, 'gray') # Set to "white" (255) pixels where mask is True camera = data.camera() mask = camera < 80 #mask是一个bool数组512 x 512,像素值大于80的位置上mask数组的值为False,其余为True。 camera[mask] = 255 plt.imshow(camera, 'gray') # Change the color for real images cat = data.chelsea() #以纹理为例,水平和对角方向上的突出边缘以及不同比例的特征。 plt.imshow(cat) # Set brighter pixels to red red_cat = cat.copy() reddish = cat[:, :, 0] > 160# 红色的值大于160(0red 1green 2blue) red_cat[reddish] = [255, 0, 0]#设为红色 plt.imshow(red_cat) # Change RGB color to BGR for openCV BGR_cat = cat[:, :, ::-1] #实现RGB到BGR通道的转换 (若图片一开始就是BGR的,就是实现从BGR到RGB的转换)。 plt.imshow(BGR_cat)
2.1.3 转换图像数据类型
- img_as_float Convert to 64-bit floating point.
- img_as_ubyte Convert to 8-bit uint.
- img_as_uint Convert to 16-bit uint.
- img_as_int Convert to 16-bit int.
2.1.4 显示图像直方图
plt.hist(img.ravel(), bins=256, histtype='step', color='black');
matplot.pyplot.hist(x, bins=None, range=None, density=None, weights=None, cumulative=False, bottom=None, histtype='bar', align='mid', orientation='vertical', rwidth=None, log=False, color=None, label=None, stacked=False, normed=None, *, data=None, **kwargs)
x : (n,) array or sequence of (n,) arrays
这个参数是指定每个bin(箱子)分布的数据,对应x轴
bins : integer or array_like, optional
这个参数指定bin(箱子)的个数,也就是总共有几条条状图
normed : boolean, optional
If True, the first element of the return tuple will be the counts normalized to form a probability density, i.e.,n/(len(x)`dbin)
这个参数指定密度,也就是每个条状图的占比例比,默认为1
color : color or array_like of colors or None, optional
这个指定条状图的颜色
2.1.5 图像分割
图像阈值分割是一种广泛应用的分割技术,利用图像中要提取的目标区域与其背景在灰度特性上的差异,把图像看作具有不同灰度级的两类区域(目标区域和背景区域)的组合,选取一个比较合理的阈值,以确定图像中每个像素点应该属于目标区域还是背景区域,从而产生相应的二值图像。
# Use thresholding plt.imshow(img>0.5)
2.1.6 Canny 算子用于边缘检测
img_edges = canny(img)#? img_filled = ndi.binary_fill_holes(img_edges)#?
2.1.7 改变图像的对比度
# Contrast stretching p2, p98 = np.percentile(img, (2, 98)) img_rescale = exposure.rescale_intensity(img, in_range=(p2, p98))#直方图对比度拉伸 plt.imshow(img_rescale, 'gray') # Equalization img_eq = exposure.equalize_hist(img) #直方图全局均衡化 plt.imshow(img_eq, 'gray') # Adaptive Equalization img_adapteq = exposure.equalize_adapthist(img, clip_limit=0.03)#直方图自适应均衡化 plt.imshow(img_adapteq, 'gray')
2.2 pytorch 基础练习
具体详见:https://pytorch-cn.readthedocs.io/zh/latest/
2.3 螺旋数据分类
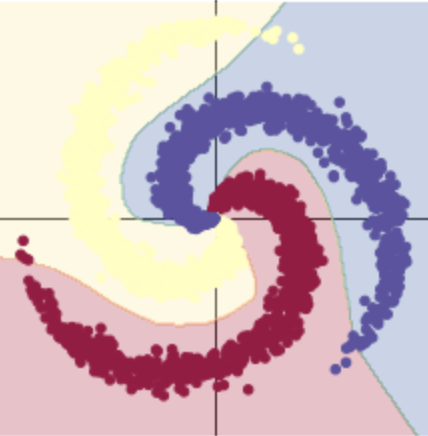
考虑逻辑回归的情况。如果将用于分类的逻辑回归用于此数据,它将创建一组线性平面(决策边界),以尝试将数据分为其类。该解决方案的问题在于,在每个区域中,都有属于多个类别的点。螺旋的分支越过线性决策边界,这不是一个很好的解决方案。我们对输入空间进行转换,以使数据被迫线性分离。在训练神经网络来执行此操作的过程中,它学习的决策边界将尝试适应训练数据的分布。
当尝试使用线性决策边界分离螺旋数据时,我们可以达到的最佳精度是50%。
# nn 包用来创建线性模型 # 每一个线性模型都包含 weight 和 bias model = nn.Sequential( nn.Linear(D, H), nn.Linear(H, C) ) model.to(device) # 把模型放到GPU上 # nn 包含多种不同的损失函数,这里使用的是交叉熵(cross entropy loss)损失函数 criterion = torch.nn.CrossEntropyLoss() # 这里使用 optim 包进行随机梯度下降(stochastic gradient descent)优化 optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay=lambda_l2)
当ReLU()激活函数时,精度高达95%。 这是因为边界变得非线性并更好地适应数据的螺旋形式。
# 这里可以看到,和上面模型不同的是,在两层之间加入了一个 ReLU 激活函数 model = nn.Sequential( nn.Linear(D, H), nn.ReLU(), nn.Linear(H, C) ) model.to(device)


2.4 回归分析
2.4.1 建立线性模型 (两层网络间没有激活函数)
# 建立神经网络模型 model = nn.Sequential( nn.Linear(D, H), nn.Linear(H, C) ) model.to(device) # 模型转到 GPU # 对于回归问题,使用MSE损失函数 criterion = torch.nn.MSELoss() # 定义优化器,使用SGD optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay=lambda_l2) # built-in L2 # 开始训练 for t in range(1000): # 数据输入模型得到预测结果 y_pred = model(X) # 计算 MSE 损失 loss = criterion(y_pred, y) print("[EPOCH]: %i, [LOSS or MSE]: %.6f" % (t, loss.item())) display.clear_output(wait=True) # 反向传播前,梯度清零 optimizer.zero_grad() # 反向传播 loss.backward() # 更新参数 optimizer.step()
2.4.2 两层神经网络
# 这里定义了2个网络,一个 relu_model,一个 tanh_model, # 使用了不同的激活函数 relu_model = nn.Sequential( nn.Linear(D, H), nn.ReLU(), nn.Linear(H, C) ) relu_model.to(device) tanh_model = nn.Sequential( nn.Linear(D, H), nn.Tanh(), nn.Linear(H, C) ) tanh_model.to(device) # MSE损失函数 criterion = torch.nn.MSELoss() # 定义优化器,使用 Adam,这里仍使用 SGD 优化器的化效果会比较差 optimizer_relumodel = torch.optim.Adam(relu_model.parameters(), lr=learning_rate, weight_decay=lambda_l2) optimizer_tanhmodel = torch.optim.Adam(tanh_model.parameters(), lr=learning_rate, weight_decay=lambda_l2)
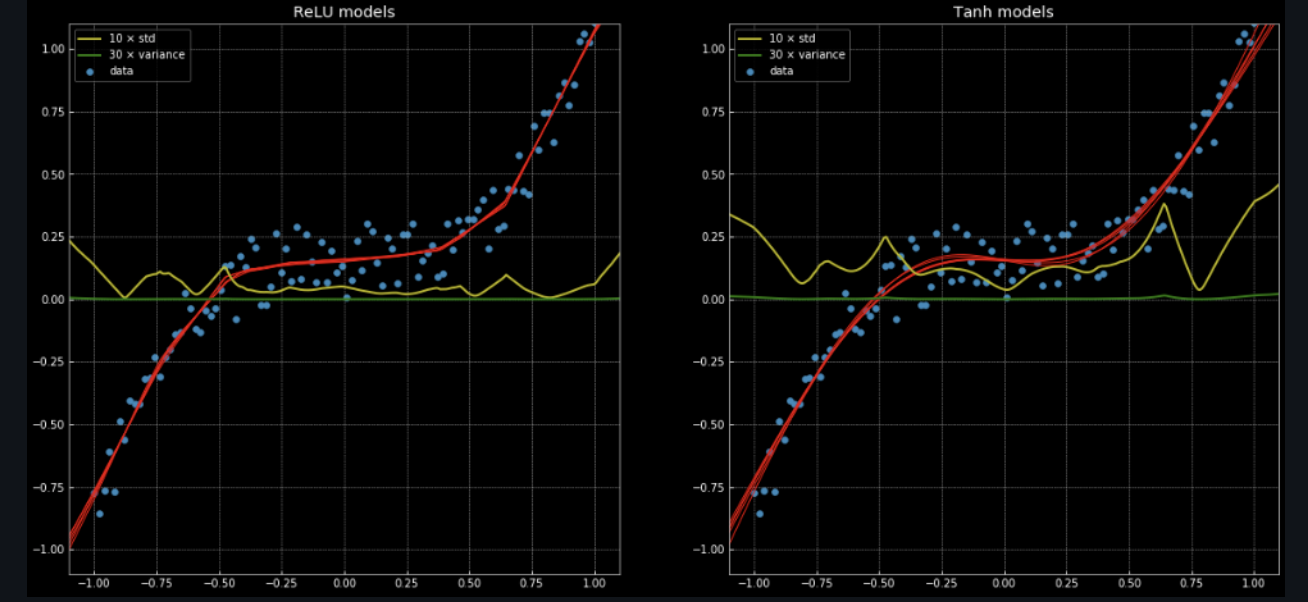
- 左侧是使用 ReLU 激活函数的网络得到的结果,右侧是使用 Tanh 激活函数的网络得到的结果。前者是分段线性函数,而后者是连续且平滑的回归。
- 使用 ReLU 激活函数,收敛较快;使用 Tanh 激活函数,一开始收敛较慢,但随后也快速收敛达到较好的效果。 ReLU 激活函数的值是0或1,Tanh 激活函数的值在0~1,前者在两个值之间变动收敛会快。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号