
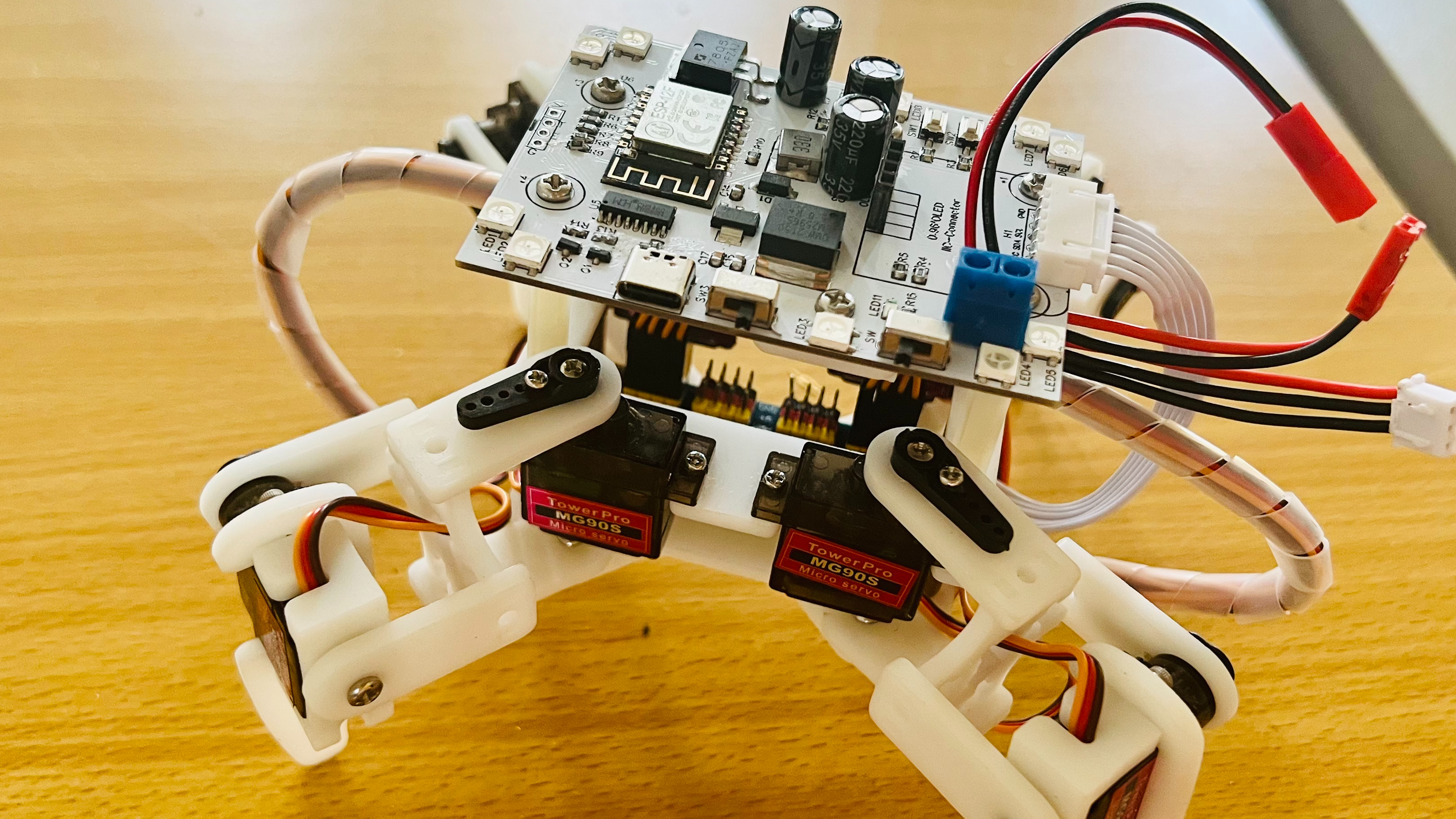
 通过ESP8266、16路舵机驱动板(PCA9685)、舵机、电池、LED制作一个四足蜘蛛机械人。
通过ESP8266、16路舵机驱动板(PCA9685)、舵机、电池、LED制作一个四足蜘蛛机械人。

1 简介
通过ESP8266、16路舵机驱动板(PCA9685)、舵机、电池、LED制作一个四足蜘蛛机械人。
2 蜘蛛机械人--准备篇
讲解了PCB、原理图、和3D打印等
3 蜘蛛机械人--组装测试与软件安装、运动步态分析
讲解了机器人的安装与调试
点击链接--②蜘蛛机械人--组装测试与软件安装、运动步态分析
4 蜘蛛机械人--模型分析与开发
讲解了模型分析与开发
5 蜘蛛机械人--总结与开发经验


通过ESP8266、16路舵机驱动板(PCA9685)、舵机、电池、LED制作一个四足蜘蛛机械人。
讲解了PCB、原理图、和3D打印等
讲解了机器人的安装与调试
点击链接--②蜘蛛机械人--组装测试与软件安装、运动步态分析
讲解了模型分析与开发

 浙公网安备 33010602011771号
浙公网安备 33010602011771号