
自动驾驶系统ADAS中间件开发
接本公众号对自动驾驶系统软件架构设计的分析,本文将对自动驾驶域控制器的中间件开发展开介绍。中间件是连接底层硬件、操作系统与上层应用的关键软件层,其核心作用是实现系统模块间的高效协同、资源管理和数据流通,同时屏蔽硬件差异,确保系统的实时性、安全性和可扩展性。
自动驾驶域控制器的主控芯片包括SOC(System-on-Chip)与MCU(Microcontroller Unit),SoC多为异构多核架构(如CPU+GPU+NPU),主频高(GHz级),内存和存储资源丰富(GB级),支持高性能计算,如感知、规划、深度学习模块,通常需要处理高吞吐量、非实时或软实时任务,同时协调多核/异构计算单元(如任务卸载到GPU/NPU),支持动态资源分配。而MCU通常基于单核或简单多核架构(如Cortex-M/R系列),主频较低(百MHz级),内存和存储资源有限(KB~MB级),侧重实时性和低功耗。基于SOC芯片与MCU芯片的不同特点,其对应中间件的开发需求也存在很大差别。
添加图片注释,不超过 140 字(可选)
理想L9域控制器(双SOC+双MCU)
下面主要介绍MCU中间件的通信管理、诊断与错误管理两个功能模块。
1通信管理
在自动驾驶MCU中,AUTOSAR Classic Platform(CP)的通信管理模块是确保车辆控制指令、传感器数据及诊断信息高效可靠传输的核心。其设计需满足硬实时性、功能安全(ASIL-D)及资源高效利用要求。以下是其核心内容及工作机制:
通信管理架构
AUTOSAR CP的通信管理基于分层设计,主要包含以下模块:
a、MCAL(Microcontroller Abstraction Layer):
硬件驱动抽象(CAN、LIN、SPI控制器配置);
直接操作MCU寄存器(如STM32的FDCAN邮箱配置)。
b、 ECU抽象层(ECU Abstraction Layer):提供统一接口(如CanIf模块管理CAN收发)。
c、服务层(Services Layer):协议栈(CAN TP、UDS、J1939);网络管理(NM)、诊断事件管理(DEM)。
d、RTE(Runtime Environment):连接应用层(SWC)与底层通信服务。
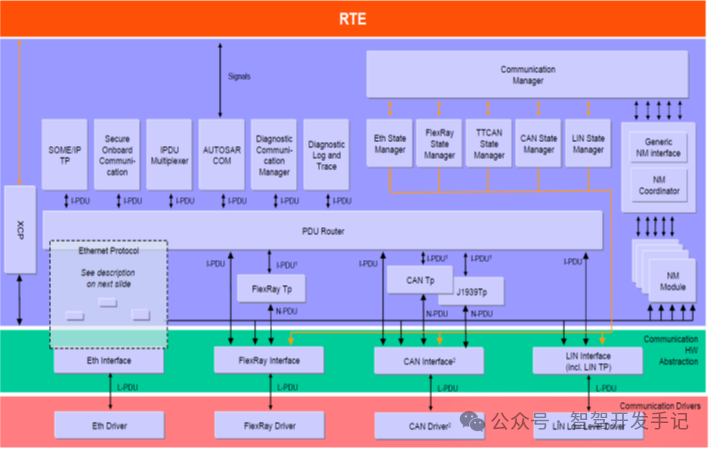
添加图片注释,不超过 140 字(可选)
Autosar中间件通信管理
1.1核心通信机制
a、 通信协议栈
CAN/CAN FD通信:
-
CanDrv:配置CAN控制器硬件参数(波特率、过滤器)。
-
CanIf:提供收发API,管理硬件邮箱(Mailbox)与信号路由。
-
CanTp:处理多帧传输(ISO-TP协议),分片长数据(如诊断日志)。
-
如刹车控制SWC通过CanIf_Transmit()发送刹车压力信号至CAN总线。
LIN通信:
-
LinIf:管理主/从节点调度表(Schedule Table)。
-
LinTp:支持诊断数据传输(如车窗位置反馈)。
FlexRay通信:
-
FrIf:配置静态/动态段时隙,支持确定性通信。
b、信号路由与PDU处理
PDU Router(Protocol Data Unit Router):
-
负责信号组包(Tx)与解包(Rx),处理不同通信通道间的数据转发。
-
信号网关(Signal Gateway):
将CAN信号映射到LIN或FlexRay(如车速信号跨总线传输)。
-
信号组(Signal Group):
将多个信号合并为单个PDU,减少总线负载(如组合刹车压力、轮速信号)。
c、实时性保障机制
静态配置:
-
通信矩阵(Communication Matrix)在编译时预定义(如CAN ID、信号周期)。
-
避免运行时动态分配资源(无动态内存操作)。
中断优先级管理:
-
高优先级中断处理关键信号(如紧急制动报文)。
-
配置CAN接收中断服务程序(ISR)快速响应。
截止时间监控:
-
使用Watchdog Manager(WdgM)监控任务执行时间,超时触发安全状态。
-
1.2 通信管理开发流程
a、通信矩阵设计:定义所有信号(CAN ID、信号长度、周期、发送方/接收方)。
b. 工具链配置
Vector工具链:
-
DaVinci Configurator:配置CanIf、CanTp、DCM模块参数。
-
CANoe:仿真总线行为,验证信号收发逻辑。
c. 代码生成与集成
RTE接口生成:
-
根据SWC端口定义,自动生成Rte_Brake_SWC_Read()等API。
静态代码优化:
-
禁用动态内存分配,使用预分配缓冲区(如CanTp的Tx/Rx Buffer)。
d. 测试与验证
单元测试:
-
使用CANoe模拟总线负载,测试最大信号吞吐量。
-
验证PDU分片重组逻辑(如发送100字节诊断数据)。
HIL测试:
-
在硬件在环台架中注入总线错误(如CAN Error Frame),验证容错机制。
-
ms内接管。
-
DEM记录刹车信号超范围DTC(如P0571)。
AUTOSAR CP中间件的通信管理通过标准化协议栈、静态资源配置及安全机制,为自动驾驶MCU提供了高可靠、低延迟的通信能力。其核心价值在于确保关键控制指令在严格时间内送达,模块化设计支持快速迭代与升级,同时满足车规级功能安全与信息安全要求。 在自动驾驶系统中,MCU的通信管理是保障车辆实时控制与安全冗余的基石,需与SoC中间件协同实现全栈智能化。
2诊断与错误管理
诊断与错误管理是保障功能安全(ISO 26262 ASIL-D)和系统可靠性的核心。AUTOSAR Classic Platform(CP)通过标准化模块(如DCM、DEM、FIM)实现故障检测、记录、响应及修复的闭环管理。
2.1诊断与错误管理架构
AUTOSAR CP的诊断系统分层设计如下:
2.2核心模块功能与机制
a.诊断通信管理(DCM,Diagnostic Communication Manager)
功能:处理外部诊断仪的请求,实现UDS(ISO 14229)服务。
核心服务:
-
会话控制(0x10):切换诊断模式(默认模式、扩展诊断模式、编程模式)。
-
读取数据(0x22):按DID(Data Identifier)读取标定值或状态(如读取车速信号DID=0xF1)。
-
写入数据(0x2E):更新参数(如修改底盘系统标定阈值)。
-
故障码清除(0x14):删除DEM中存储的DTC。
通信流程:
-
诊断仪通过CAN总线发送请求帧(如0x22 F1 00)。
-
DCM解析请求,调用RTE接口读取SWC数据。
-
DCM组响应帧(如0x62 F1 00 45表示车速为69 km/h)并发送至总线。
b. 诊断事件管理(DEM,Diagnostic Event Manager)
功能:记录故障事件(DTC)及上下文数据,触发故障响应。
核心机制:
-
DTC存储: 存储格式:包含故障码(如P0700)、状态(Active/Inactive)、发生次数、时间戳。
-
快照(Snapshot):记录故障发生时的环境数据(如车速、电压、温度)。
-
扩展数据(Extended Data):附加信息(如故障发生时的软件版本)。
-
老化机制:若故障未重复发生,DTC在一定周期后转为Inactive。
事件触发:
-
SWC调用Dem_ReportErrorStatus()报告故障(Dem_SetEventStatus(P0700, DEM_EVENT_FAILED))。
-
DEM更新DTC状态,并触发关联响应(如通过FIM限制功能)。
c. 功能抑制管理(FIM,Function Inhibition Manager)
功能:在故障发生时限制或禁用特定功能,防止危险操作。
配置策略:
-
功能组(Function Group):将多个SWC功能绑定为逻辑组(如“自动驾驶模式”)。
-
抑制条件:当DTC状态为Active时,禁止功能组执行。
-
示例:若雷达传感器故障(DTC=U0123),FIM禁用自适应巡航控制(ACC)功能。
d. 默认错误追踪(DET,Default Error Tracer)
-
功能:记录BSW模块的运行时错误(如API参数非法、资源耗尽)。
-
错误类型:
-
开发错误:API调用不符合规范(如传递空指针)。
-
运行时错误:硬件故障(CAN控制器BusOff)、内存溢出。
-
处理机制:记录错误码、模块ID及错误位置,触发系统复位或安全状态。
2.3诊断与错误管理流程
a. 故障检测与上报
SWC检测异常:
-
应用层算法检测到异常(如轮速信号超限)。
-
调用Dem_ReportErrorStatus(DEM_EVENT_ID, DEM_EVENT_FAILED)上报至DEM。
DEM记录DTC:
-
更新DTC状态为Active,存储快照及扩展数据。
-
触发关联事件(如通知FIM抑制功能)。
b. 故障响应与抑制
FIM执行抑制:
-
根据预配置规则,禁用相关功能(如ESP功能受限)。
-
通过RTE通知HMI显示故障灯(如ABS警告灯点亮)。
DCM响应诊断请求:
-
诊断仪读取DTC列表(服务0x19),获取故障详情。
-
工程师分析快照数据,定位故障原因(如传感器供电异常)。
c. 故障恢复与清除
修复与测试:
-
更换故障硬件或更新软件后,SWC检测恢复正常。
-
调用Dem_ReportErrorStatus(DEM_EVENT_ID, DEM_EVENT_PASSED)更新DTC状态。
DTC清除:
-
诊断仪发送0x14服务清除DTC,DEM重置故障状态。
-
FIM解除功能抑制,系统恢复正常运行。
2.4开发与配置工具链
-
需求定义:
-
使用Vector PREEvision定义DTC列表、FIM抑制规则及事件关联。
-
模块配置:
-
DaVinci Configurator配置DEM事件、DCM服务及FIM功能组。
-
示例:绑定DTC=U0123到FIM功能组“ACC”。
-
代码生成:
-
工具链自动生成DCM服务处理代码、DEM事件表及FIM抑制逻辑。
-
测试验证:
-
CANoe模拟诊断仪发送UDS请求,验证DTC读写及清除功能。
-
HIL测试台注入故障(如强制CAN总线错误),检查FIM抑制行为。
AUTOSAR CP中间件的诊断与错误管理通过标准化协议、故障闭环控制及安全抑制机制,为自动驾驶MCU提供了符合车规级功能安全的解决方案。MCU中间件的资源分配与调度、RTE接口生成与调用、存储管理、安全与加密、ECU状态管理与通用系统服务。
参考文献链接
人工智能芯片与自动驾驶

 浙公网安备 33010602011771号
浙公网安备 33010602011771号