


应用光学论文热点
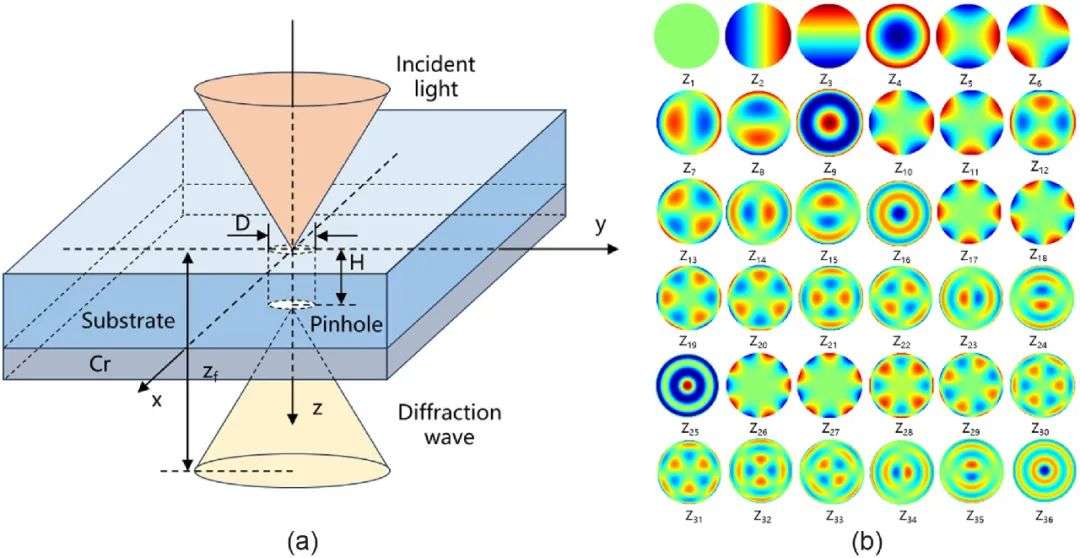
Analysis of three-dimensional pinhole diffraction of deep ultraviolet converging light with a large numerical aperture
作者:Renju Peng, Yong Zhou, and Bo Zhang
单位:成都理工大学电子工程学院
摘要:点衍射干涉仪的测量精度为 受 纳米级针孔。本文分析了衍射过程 由深紫外会聚光照射的针孔,其 基于矢量衍射理论的大数值孔径 (NA)。钥匙 指标,包括衍射 NA 和波前像差 相对于理想的球面波前,根据 极化状态、针孔直径和 Cr 厚度。 此外,还研究了对齐误差的影响。这 结果表明,对于波长193nm和NA=0.84,最佳极化状态为 线性偏振,衍射波前最接近 当针孔直径 200 nm,Cr 厚度为 100 nm。对齐错误 更改原始中心对称像差的幅值 组件并引入非对称组件,例如 COMA。
添加图片注释,不超过 140 字(可选)
链接:https://opg.optica.org/ao/fulltext.cfm?uri=ao-64-11-2934&id=569935
添加图片注释,不超过 140 字(可选)
2
用于多色 3D 荧光成像的共聚焦显微内窥镜
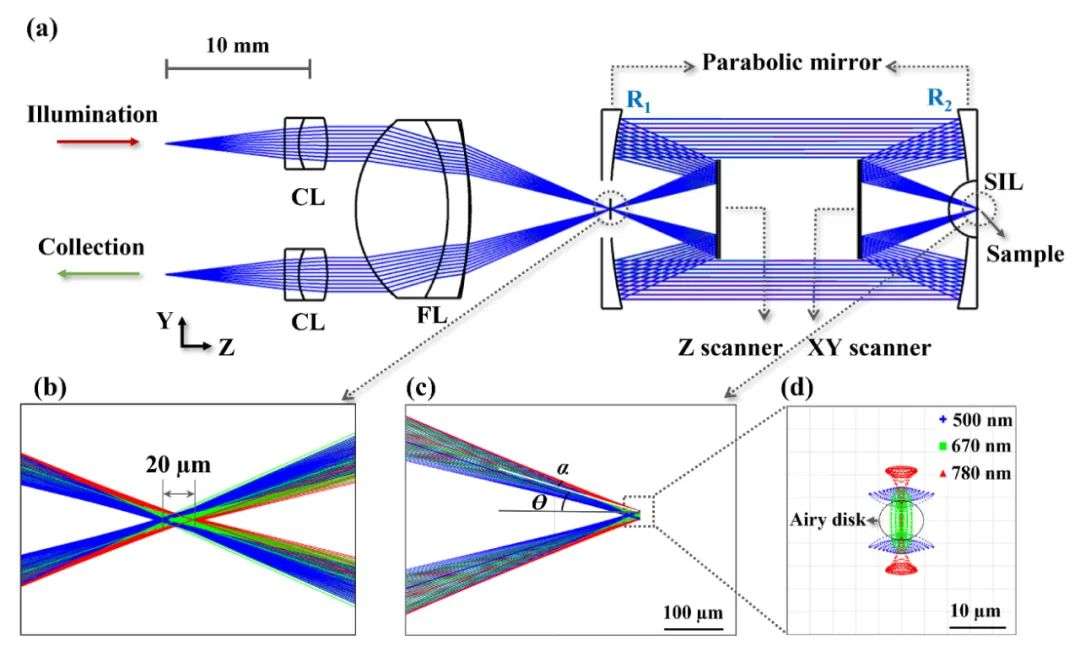
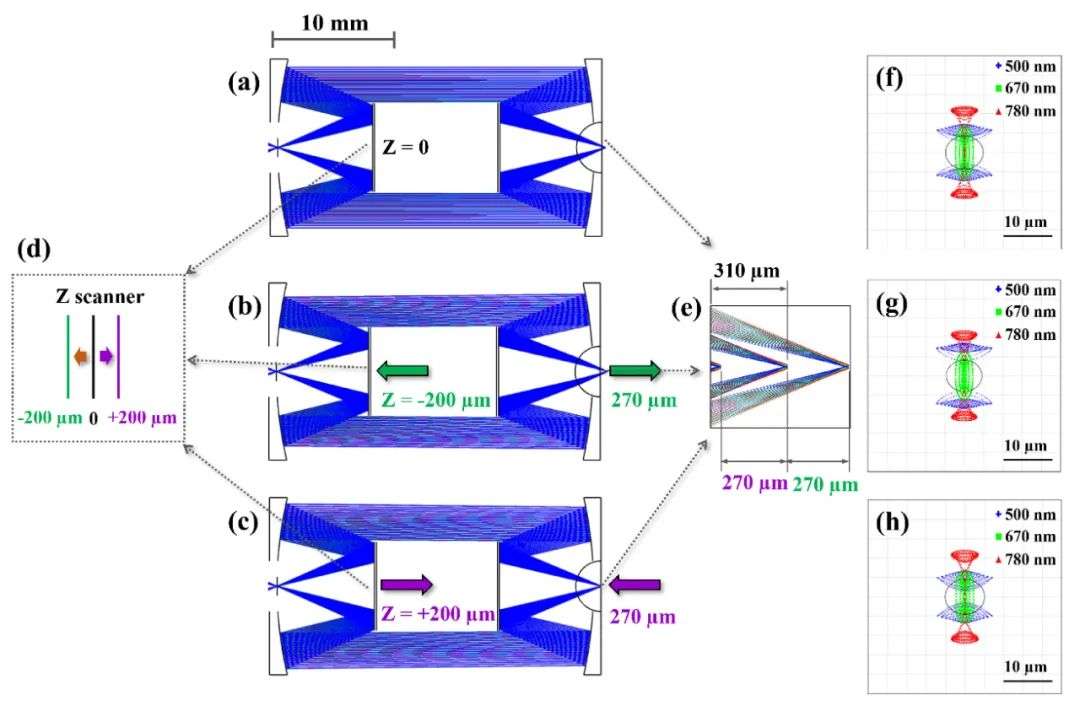
Confocal micro-endoscope for multi-color 3-D fluorescence imaging
作者:Lin Huang, Xuchun Zhang, Xiaokuan Zhang, Yafei Yang, and Haoyang Shi
单位: 空军工程大学
摘要:在这项工作中,我们提出了共聚焦显微内窥镜的两种光学设计。一种基于全反射抛物面镜,另一种基于混合折射反射折反射镜。两种共聚焦显微内镜设计都可以在 500–780 nm 波长下工作,色差最小。全微机电系统 (MEMS) 3D 光束扫描方法可实现沿轴向的视频速率成像。共聚焦显微内窥镜使用 ZEMAX 软件中的光线追踪模拟进行建模和优化。关键设计标准的仿真结果表明,共聚焦显微内窥镜具有多色 3-D 荧光成像的潜力。
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
链接:https://opg.optica.org/ao/fulltext.cfm?uri=ao-64-11-2910&id=569896
添加图片注释,不超过 140 字(可选)
3
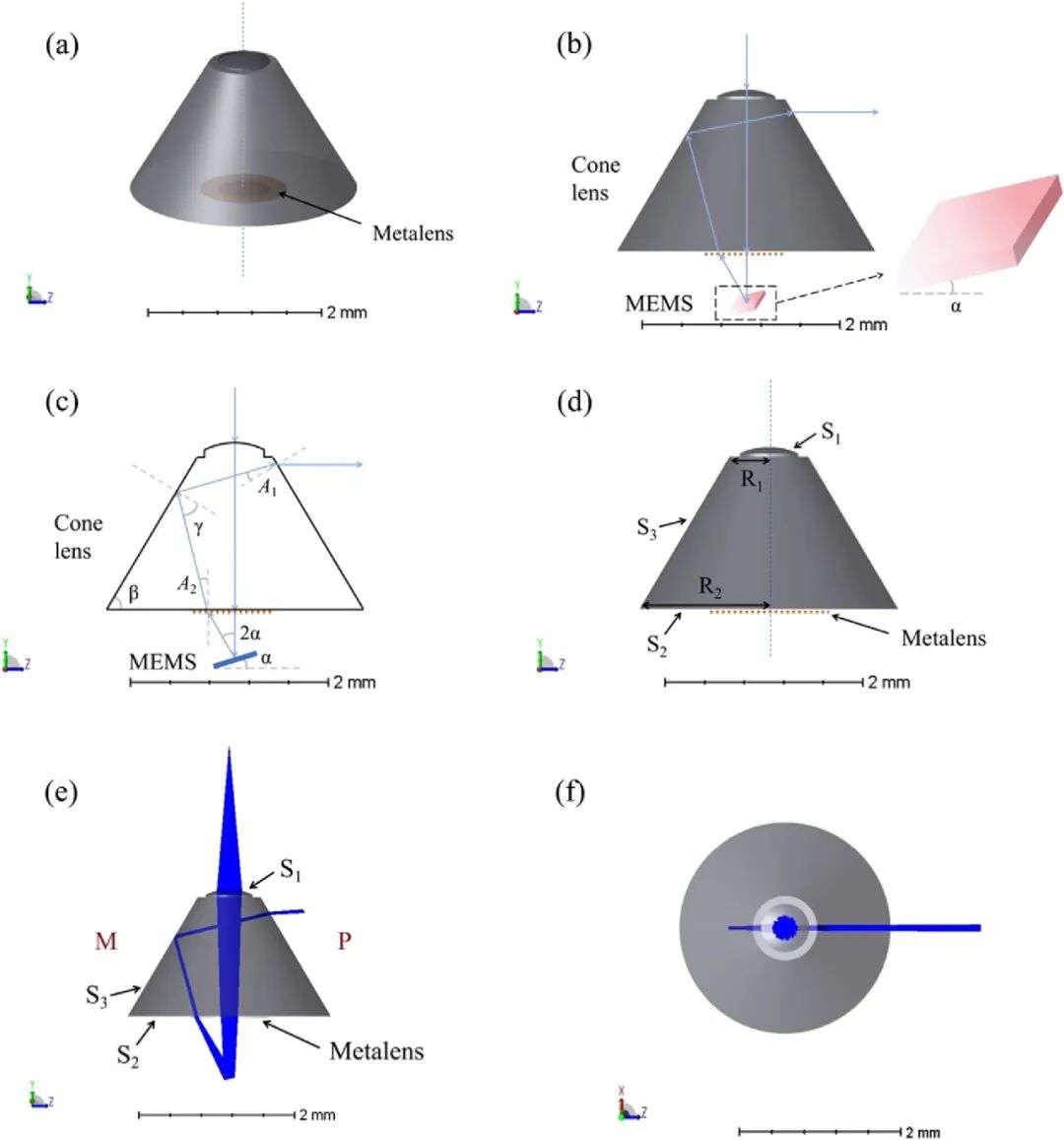
基于 MEMS 的光束转向系统,带有超透镜和锥形透镜
MEMS-based beam steering system with metalens and cone lens
作者:Run Lyu and Zhouping Su
单位: 江南大学 理学院
摘要:该文提出一种基于微机电系统(MEMS)的激光雷达光束转向系统,该系统由锥形透镜和超透镜组成。锥形透镜具有三个关键的光学表面,入射光束通过这些表面,然后沿水平方向输出。当 MEMS 绕 Y 轴旋转时,输出光束可以在水平方向上扫描 360° 视场。此外,输出光束还可以在 12.3° 的垂直视场 (FoV) 内进行扫描。超透镜可以进一步减少输出光束在水平和垂直方向上的发散度。输出光束具有较窄的发散角,发散角为0.313°X0.287°。该系统为固态 LiDAR 光束转向系统提供了一种设计解决方案,满足大 FoV 的设计要求,具有更小型化的结构,同时更易于集成和组装。
添加图片注释,不超过 140 字(可选)
链接:https://opg.optica.org/ao/fulltext.cfm?uri=ao-64-11-2819&id=569877
添加图片注释,不超过 140 字(可选)
4
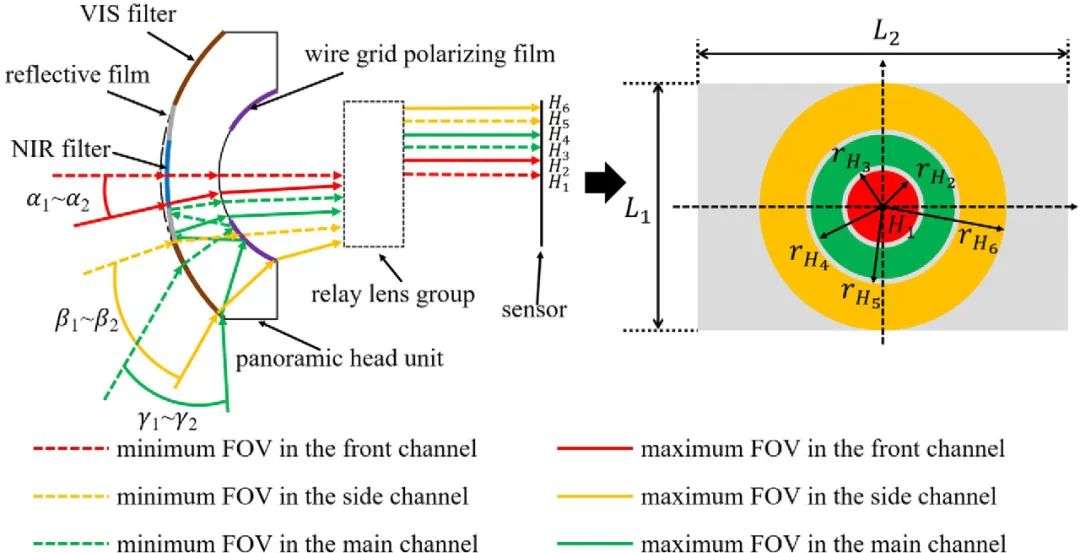
无中央盲区和前透镜组的多维信息感知全景成像系统设计
Ruoyan Wei, Ning Pan, Yiqi Liao, Runzhou Shi 和 Jian Bai
作者:Ruoyan Wei, Ning Pan, Yiqi Liao, Runzhou Shi 和 Jian Bai
单位:浙江大学
摘要:该文提出了一种基于带通滤光片和偏振技术的无中心盲区三通道全景成像系统,可实现双波段和双偏振信息的获取。与其他没有中央盲区的多通道全景成像系统相比,这种设计消除了前镜头组,从而显着降低了组装复杂性,并实现了产品的整体美学和谐。主通道、侧通道和前通道的视野 (FOV) 为360°X(60-90°)、360°X(22-60°)、360°X(0-13°)。使用f--2.5 数值和最大 F-theta 畸变为 7.48%,该系统具有出色的图像质量、良好的热稳定性和宽松的公差要求。对于所有三个通道,172 lp/mm 时的调制传递函数 (MTF) 大于 0.309,最大均方根 (RMS) 光斑半径为 2.538 μm。我们的建议为全景成像系统提供了一种很有前途的方法,可以去除前镜头组并感知高质量的多维信息。
添加图片注释,不超过 140 字(可选)
链接:https://opg.optica.org/ao/fulltext.cfm?uri=ao-64-11-2958&id=569975
添加图片注释,不超过 140 字(可选)
5
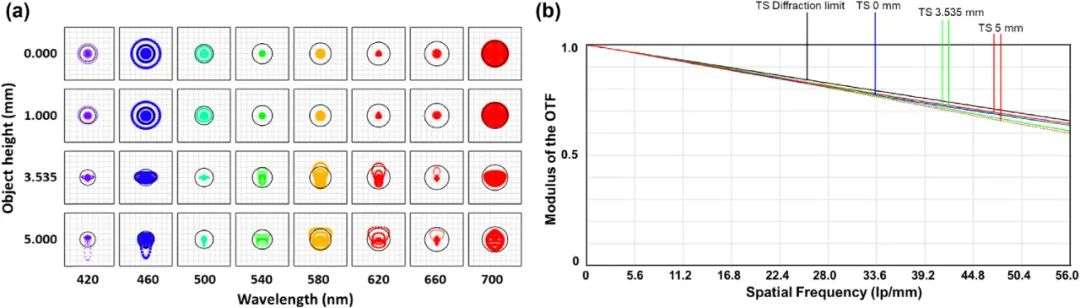
宽场波长编码深度传感物镜的设计
Design of a wide-field wavelength-coded depth-sensing objective
作者:Ying Sun 和 Lingbao Kong
单位:复旦大学 信息科学与技术学院
摘要:在这项工作中,我们开发了一种宽视场波长编码的深度传感物镜。具体来说,深度可以通过颜色转换算法感知,也可以通过聚焦光的峰值波长进行解码。通过将视场 (FOV) 和焦距偏移扩展到毫米级,进一步结合 2D 机械扫描或点源阵列,可以有效地获取 3D 表面数据。光学设计基于双远心六镜头配置进行了优化,旨在实现大范围、高度线性的轴向色差和宽视场下的均匀成像。最终,在 420–700 nm 的工作波段下,物镜实现了 5.27 mm 的焦距偏移,线性度0.99。在16X16mm^2视场角。在加工和组装之前,结构设计经过仔细考虑了制造公差。实验表明,该物镜在中心波长处实现了 3.10 μm 的横向分辨率。

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
链接:https://opg.optica.org/ao/fulltext.cfm?uri=ao-64-11-3023&id=570016
人工智能芯片与自动驾驶


 浙公网安备 33010602011771号
浙公网安备 33010602011771号