【OpenCV 4.5】RotatedRect旋转矩形 各参数研究
【OpenCV 4.5】RotatedRect各参数研究
class CV_EXPORTS RotatedRect
{
public:
//构造函数
RotatedRect();
RotatedRect(const Point2f& center, const Size2f& size, float angle);
//size宽x高
RotatedRect(const CvBox2D& box);
void points(Point2f pts[]) const;//返回矩形的4个顶点
Rect boundingRect() const; //返回包含旋转矩形的最小矩形(横平竖直)
Point2f center; //矩形的质心
Size2f size; //矩形的边长
float angle; //旋转角度,当角度为0、90、180、270等时,矩形就成了一个直立的矩形
};
三个重要参数
中心点center:为矩形对角线的交点
Width与Height
角度angle
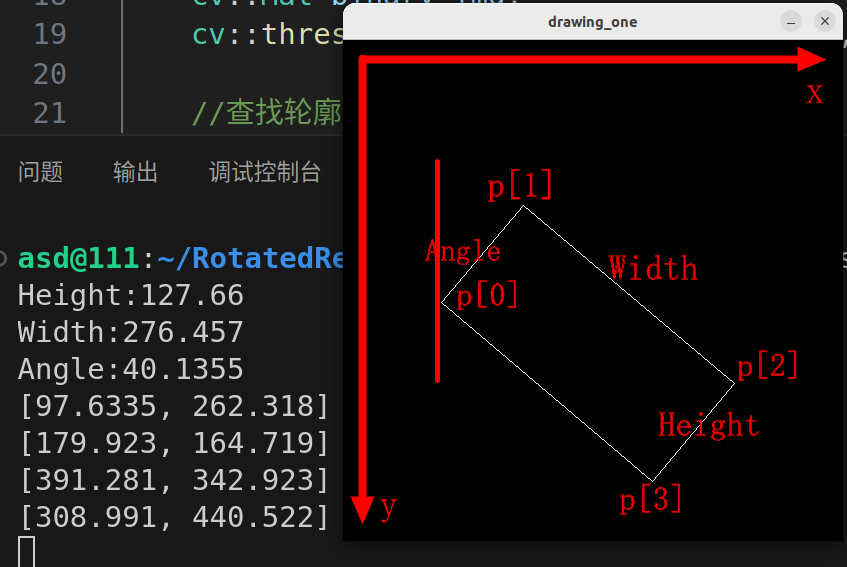
四个顶点p[0]-p[3]
四个顶点p[0]-p[3]
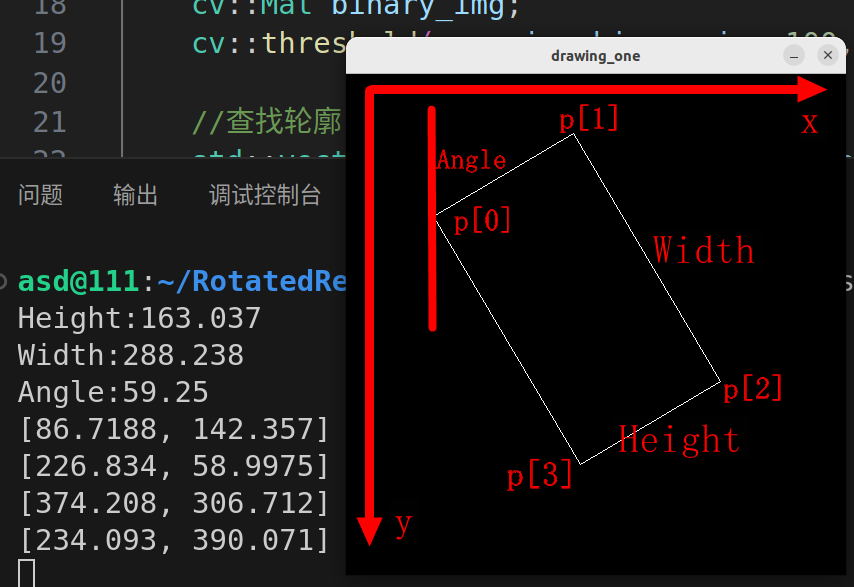
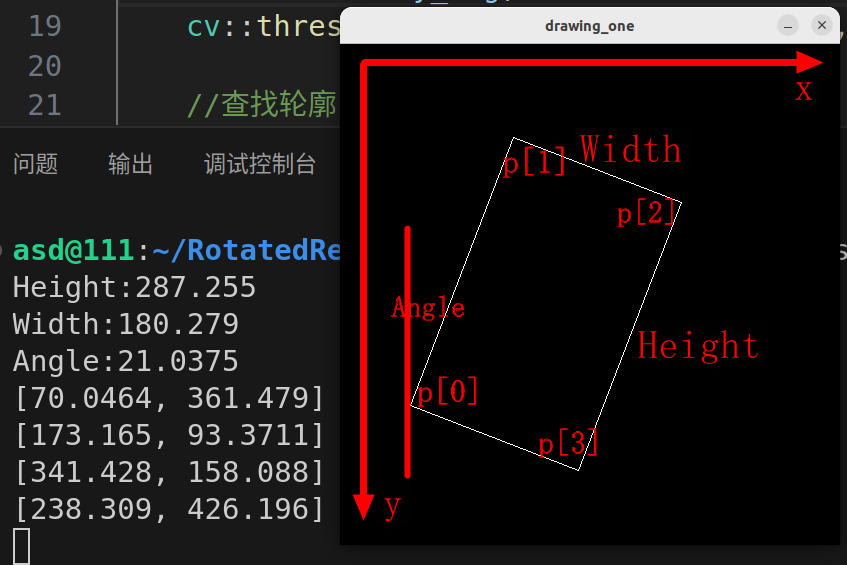
x坐标最小的点为p[0]
先看x坐标最小 再看y坐标最小
p[0]~p[3]按顺时针方向依次排列
Width与Height
p[0]-p[1]是Height
p[1]-p[2]是Width
不管长度大小
角度angle
Height(p[0]-p[1])和y轴的夹角
实验分析
正正好的一定是90度
p[0]一定是x最小的点
先看x再看y 都看小
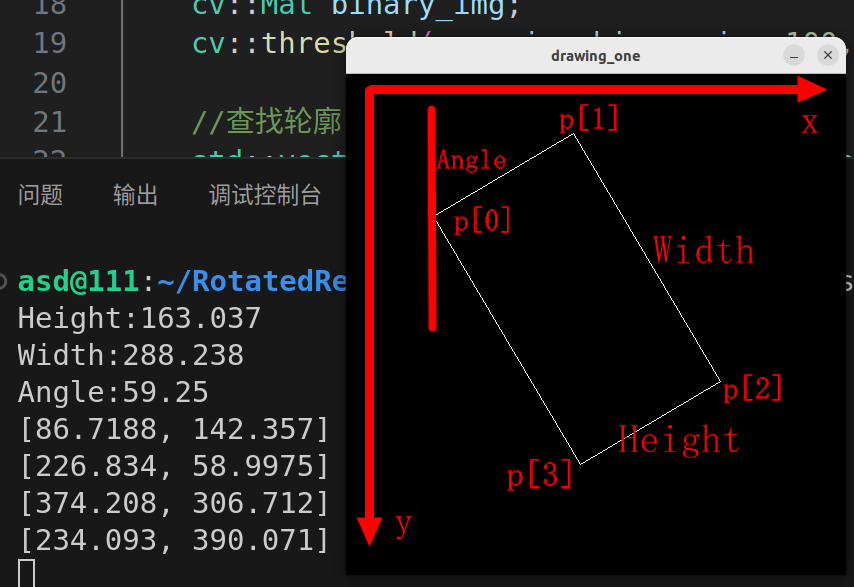
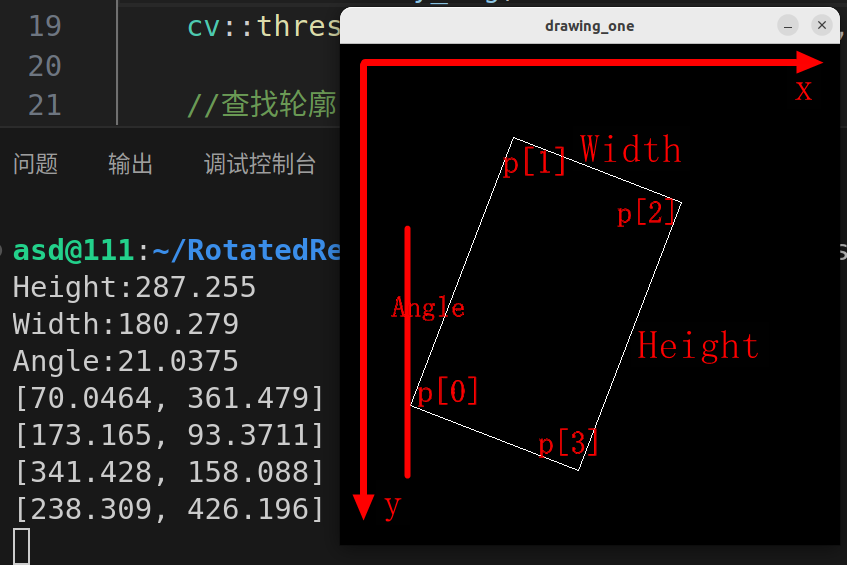
Height一定是p[0]-p[1]
Width一定是p[1]-p[2]

代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat test_image(200, 200, CV_8UC3, Scalar(0));
RotatedRect rRect = RotatedRect(Point2f(100, 100), Size2f(100, 50), 30);
/*获得角度*/
cout << rRect.angle << endl;
//角度30度
/*获得中心点*/
cout << rRect.center << endl;
//中心点[100, 100]
/*获得宽×高*/
cout << rRect.size << endl;
//宽×高[100 x 50]
/*获得宽*/※
cout << rRect.size.width << endl;
// 100
/*获得高*/※
cout << rRect.size.height << endl;
// 50
/*获得面积*/※
cout << rRect.size.area() << endl;
//5000
//绘制旋转矩形
Point2f vertices[4];
rRect.points(vertices);
for (int i = 0; i < 4; i++)
line(test_image, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 0), 2);
//圈中这个旋转矩形的外矩形
Rect brect = rRect.boundingRect();
rectangle(test_image, brect, Scalar(255, 0, 0), 2);
imshow("rectangles", test_image);
waitKey(0);
return 0;
}
装甲板识别注意事项:瘦长型
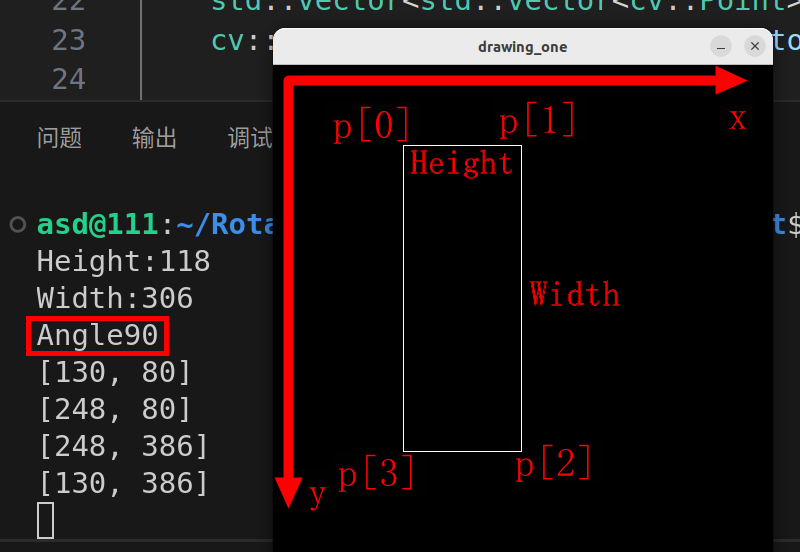
Height < Width
p[0]都是最左上角的点
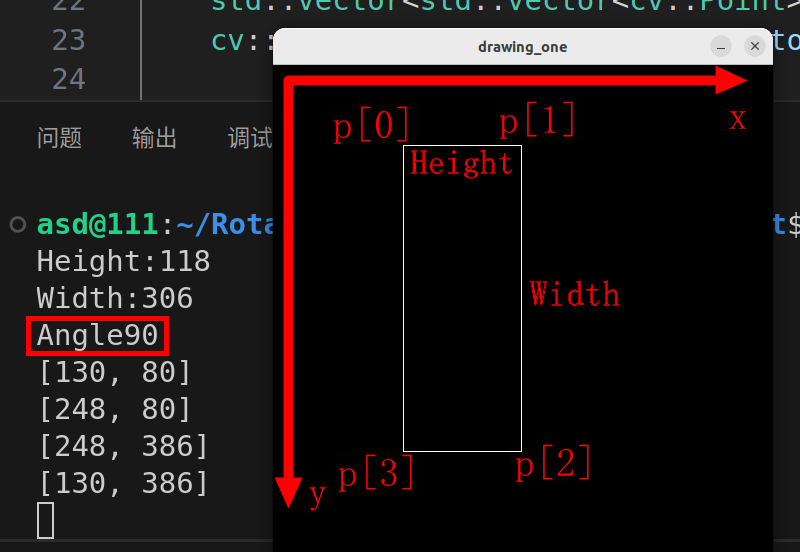
Angle 90度
Angle 0-90度
需要转化
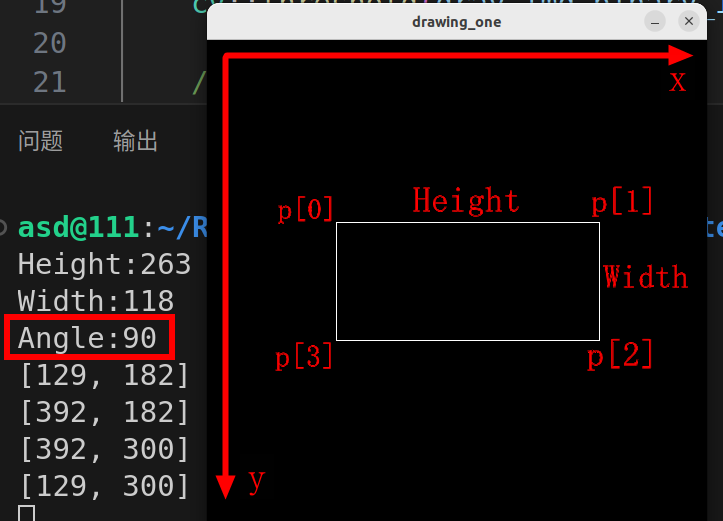
Height > Width
p[0] 左下角的点:
Angle 0-90度
【判断条件】
p[0].x<p[1].x
p[0].y>p[1].y
【操作】
Height 和 Width进行对调

如何初筛矩形
长度
Height > (1/10) * Width
Height < ( ) * Width
角度
要么90度
要么abs<30度****
(_rect.size.height * 10 > _rect.size.width)//不能太细
&& (_rect.size.width * 1 < _rect.size.height)//不能太粗
&& ((abs(_rect.angle) < 30 || _rect.angle == 90))//角度

 浙公网安备 33010602011771号
浙公网安备 33010602011771号