
STM32F207V 进行DS18B20处理
1、 DS18B20接口很简单,VCC、DQ、GND三个引脚,VCC采用外部供电3.3V,DQ需上拉电阻,当时按照参考资料上外接4.7K的上拉电阻,GPIO设置的OD无上拉,始终读不到ROM中的64位序列号,后面发送的转换指令更别想了,后来GPIO改成推挽输出时,诶,就能读到数据,推挽输出无非就是增大驱动能力,仔细看手册,其中有提到,DS18B20空闲处于低功耗状态,在执行温度转换或从高速暂存器向EPPROM传送数据时,工作电流可高达1.5mA,但并有说读ROM中的64位数据时,电流需要多少,也许在读ROM中的数据电流也需要要求。知道了加大驱动能力才能读到,加上之前写I2C和FLASH擦除时,数据线都是设置OD类型,通用性较好,好移植,所以还是改成OD类型,把4.7K的电阻换小点,换成1K电阻,就可以正确的读写操作。
GPIO配置:
1 void Ds18b20_GPIO_Config(void) 2 { 3 GPIO_InitTypeDef GPIO_InitStructure; 4 5 RCC_AHB1PeriphClockCmd( RCC_AHB1Periph_GPIOE,ENABLE); 6 7 GPIO_InitStructure.GPIO_Pin = DS18B20_DATA; 8 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; 9 GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; //OD门 10 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; 11 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 12 GPIO_Init(GPIOE,&GPIO_InitStructure); 13 }
2、操作步骤,在使用任何一条功能指令前,都必须先执行有复位、ROM指令。
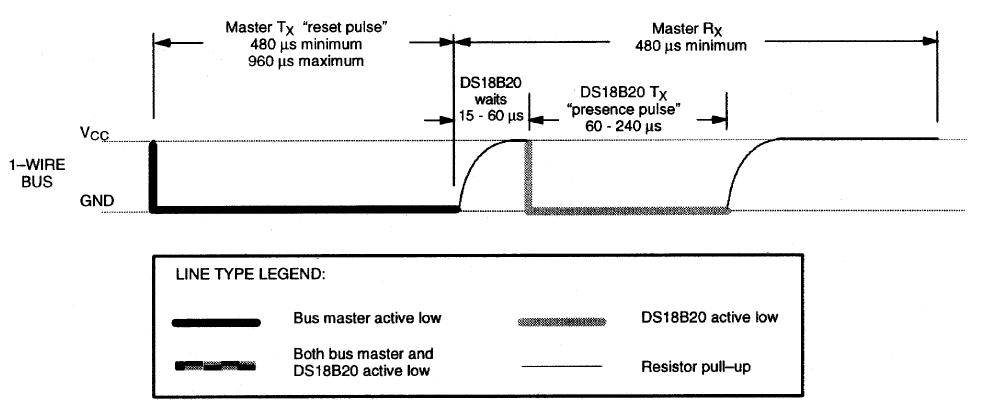
(1)、复位信号就是双方握手,达成协议后才能相互通信。时序如下,一定要注意minimum和maximum,Master主机先发送低电平脉冲,低电平持续480us~960us(这里设置700us,延迟后记得释放数据线,也就是拉高),DS18B20等待15~60us后(用while语句检测低电平的到来),会发出低电平脉冲信号给Master,该低电平脉冲60~240us,Master接收到后,就说明握手成功,用while语句检测高电平结束。
代码:
1 void Ds18b20_rst(void) 2 { 3 DS18B20_DATA_H; 4 DS18B20_DATA_L; 5 Ds18b20_delay(T700US); //700us 6 DS18B20_DATA_H; //释放数据线 7 while(DS18B20_DATA_Read); //检测低电平 8 Ds18b20_delay(T700US); 9 while(!DS18B20_DATA_Read); //检测高电平 10 DS18B20_DATA_H; 11 }
(2)、发ROM指令和功能指令,就是1bit 1bit 的往外发,读也是1bit 1bit的往里读,发送顺序是先低后高。读写时有高有低,一定要按照时序严格进行操作:
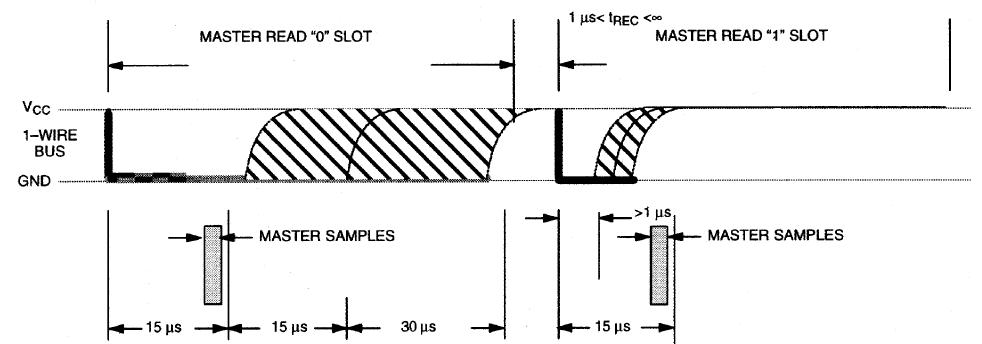
a)、写“0” 和“1”时序,先拉低15us,发送高电平持续45us,注意不低于60us,发送完1bit,释放数据线。

代码:
1 void Ds18b20_Send_0(void) 2 { 3 DS18B20_DATA_L; 4 Ds18b20_delay(T15US); //15us 5 DS18B20_DATA_L; 6 Ds18b20_delay(T45US); //45us 7 DS18B20_DATA_H; //释放总线 8 } 9 10 void Ds18b20_Send_1(void) 11 { 12 DS18B20_DATA_L; 13 Ds18b20_delay(T15US); //15us 14 DS18B20_DATA_H; 15 Ds18b20_delay(T45US); 16 DS18B20_DATA_H; //释放总线 17 } 18 19 void Ds18b20_send_byte(uint8_t data) 20 { 21 uint8_t i = 8; 22 23 while(i--) 24 { 25 if(data & 0x01) //从低位开始发送 26 Ds18b20_Send_1(); 27 else 28 Ds18b20_Send_0(); 29 30 data >>= 1; 31 } 32 }
b)、读“0” 和“1”时序,在MASTER SAMPLES就可以采样数据,但一般会大于15us后开始采集数据,读写前 和 读写完后,都要记得释放数据
代码:
1 uint8_t Ds18b20_read_byte(void) 2 { 3 uint8_t i = 8; 4 uint8_t data_buffer = 0; 5 6 DS18B20_DATA_H; //释放数据线 7 while(i--) 8 { 9 data_buffer >>= 1; 10 DS18B20_DATA_L; 11 Ds18b20_delay(T1US); //1us 12 DS18B20_DATA_H; //释放数据线 13 Ds18b20_delay(T15US); 14 if(DS18B20_DATA_Read) //接收低位开始 15 { 16 data_buffer |= 0x80; 17 } 18 Ds18b20_delay(T45US); 19 DS18B20_DATA_H; 20 } 21 22 return data_buffer; 23 }
写好写字节函数 和 读字节函数,那么就可以发送ROM指令和功能指令了,具体指令参考数据手册。
一些具体操作指令代码
ds18b20.c


1 #include "ds18b20.h" 2 3 #define DS18B20_DATA GPIO_Pin_3 4 #define DS18B20_DATA_H GPIOE->BSRRL = GPIO_Pin_3 5 #define DS18B20_DATA_L GPIOE->BSRRH = GPIO_Pin_3 6 #define DS18B20_DATA_Read GPIOE->IDR & GPIO_Pin_3 7 8 #define T1US 15 9 #define T15US 230 10 #define T45US 790 11 #define T700US 12000 12 13 void Ds18b20_GPIO_Config(void) 14 { 15 GPIO_InitTypeDef GPIO_InitStructure; 16 17 RCC_AHB1PeriphClockCmd( RCC_AHB1Periph_GPIOE,ENABLE); 18 19 GPIO_InitStructure.GPIO_Pin = DS18B20_DATA; 20 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; 21 GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; 22 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; 23 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 24 GPIO_Init(GPIOE,&GPIO_InitStructure); 25 } 26 27 void Ds18b20_delay(__IO uint32_t nCount) 28 { 29 while(nCount--) 30 { 31 32 } 33 } 34 35 void Ds18b20_rst(void) 36 { 37 DS18B20_DATA_H; 38 DS18B20_DATA_L; 39 Ds18b20_delay(T700US); //700us 40 DS18B20_DATA_H; //释放数据线 41 while(DS18B20_DATA_Read); //检测低电平 42 Ds18b20_delay(T700US); 43 while(!DS18B20_DATA_Read); //检测高电平 44 DS18B20_DATA_H; 45 } 46 47 void Ds18b20_Send_0(void) 48 { 49 DS18B20_DATA_L; 50 Ds18b20_delay(T15US); //15us 51 DS18B20_DATA_L; 52 Ds18b20_delay(T45US); //45us 53 DS18B20_DATA_H; //释放总线 54 } 55 56 void Ds18b20_Send_1(void) 57 { 58 DS18B20_DATA_L; 59 Ds18b20_delay(T15US); //15us 60 DS18B20_DATA_H; 61 Ds18b20_delay(T45US); 62 DS18B20_DATA_H; //释放总线 63 } 64 65 void Ds18b20_send_byte(uint8_t data) 66 { 67 uint8_t i = 8; 68 69 while(i--) 70 { 71 if(data & 0x01) //从低位开始发送 72 Ds18b20_Send_1(); 73 else 74 Ds18b20_Send_0(); 75 76 data >>= 1; 77 } 78 } 79 80 uint8_t Ds18b20_read_byte(void) 81 { 82 uint8_t i = 8; 83 uint8_t data_buffer = 0; 84 85 DS18B20_DATA_H; //释放数据线 86 while(i--) 87 { 88 data_buffer >>= 1; 89 DS18B20_DATA_L; 90 Ds18b20_delay(T1US); //1us 91 DS18B20_DATA_H; //释放数据线 92 Ds18b20_delay(T15US); 93 if(DS18B20_DATA_Read) //接收低位开始 94 { 95 data_buffer |= 0x80; 96 } 97 Ds18b20_delay(T45US); 98 DS18B20_DATA_H; 99 } 100 101 return data_buffer; 102 } 103 104 void Ds18b20_Read_ROM(uint8_t *pBuff) 105 { 106 uint8_t i =0; 107 Ds18b20_rst(); 108 Ds18b20_send_byte(0x33); //读Rom指令 109 for(i=0; i<8; i++) 110 { 111 pBuff[i] = Ds18b20_read_byte(); 112 } 113 } 114 115 void Ds18b20_Convert_temprature(void) 116 { 117 Ds18b20_rst(); 118 Ds18b20_send_byte(0xcc); //忽略ROM指令 119 Ds18b20_send_byte(0x44); //转换指令 120 } 121 122 void Ds18b20_Read_register(uint8_t *pBuff) 123 { 124 uint8_t i = 0; 125 Ds18b20_Convert_temprature(); 126 Ds18b20_rst(); 127 Ds18b20_send_byte(0xcc); //忽略ROM指令 128 Ds18b20_send_byte(0xbe); //读取存储器指令 129 for(i=0; i<8; i++) 130 { 131 pBuff[i] = Ds18b20_read_byte(); 132 } 133 } 134 135 void Ds18b20_weite_threshold(uint8_t TH, uint8_t TL, uint8_t Resolution) 136 { 137 Ds18b20_rst(); 138 Ds18b20_send_byte(0xcc); //忽略ROM指令 139 Ds18b20_send_byte(0x4e); //写暂存器指令 140 Ds18b20_send_byte(TH); 141 Ds18b20_send_byte(TL); 142 if(Resolution == 9) 143 { 144 Ds18b20_send_byte(0x1f); 145 } 146 else if(Resolution == 10) 147 { 148 Ds18b20_send_byte(0x3f); 149 } 150 else if(Resolution == 11) 151 { 152 Ds18b20_send_byte(0x5f); 153 } 154 else //if(Resolution == 12) //其他任何都默认设置12bit分辨率 155 { 156 Ds18b20_send_byte(0x7f); 157 } 158 }
主函数:
1 int main(void) 2 { 3 u8 i = 0; 4 u8 id[8]; 5 RCC_ClocksTypeDef rcc_clocks; 6 7 Clock_Config(); 8 USART_Config(); 9 10 Ds18b20_GPIO_Config(); 11 Ds18b20_Read_ROM(id); 12 printf("DS18B20 64bit ROM Data:\n"); 13 for(i=0; i<8; i++) 14 { 15 printf("0x%02x,",id[i]); 16 } 17 printf("\n"); 18 printf("DS18B20 Memory Data:\n"); 19 20 Ds18b20_Read_register(id); 21 for(i=0; i<8; i++) 22 { 23 printf("0x%02x,",id[i]); 24 } 25 26 printf("\n"); 27 28 Ds18b20_weite_threshold(0x3b,0x36,12); 29 Ds18b20_Read_register(id); 30 for(i=0; i<8; i++) 31 { 32 printf("0x%02x,",id[i]); 33 } 34 35 printf("\n"); 36 37 while(1) 38 { 39 Ds18b20_Read_register(id); 40 printf("temprature:%.4f\n",((id[1]<<8) | id[0]) * 6.25 /100); 41 Delay(0x1fffff0); /* delay 1000ms */ 42 } 43 }
3、打印信息
(1)、读5个不同DS18B20中ROM数据:
0x28,0x37,0x4f,0xca,0x06,0x00,0x00,0x03
0x28,0x3b,0xf4,0xc9,0x06,0x00,0x00,0xc9
0x28,0xee,0xa0,0xcc,0x06,0x00,0x00,0xed
0x28,0xca,0x02,0xcb,0x06,0x00,0x00,0xb1
0x28,0xf0,0xbf,0xcb,0x06,0x00,0x00,0x30
最前面8位是单线系列编码固定28H,接着48位是唯一序列号,最后8位是CRC,有关CRC计算参考手册,这里也没有去验证CRC是否正确。
(2)、
DS18B20 64bit ROM Data:
0x28,0xf0,0xbf,0xcb,0x06,0x00,0x00,0x30, //64位中的序列号
DS18B20 Memory Data:
0xcd,0x01,0x4b,0x46,0x7f,0xff,0x03,0x10, //读暂存器中的默认值
0xcd,0x01,0x3b,0x36,0x7f,0xff,0x03,0x10, //改写后,读暂存器中的数据
temprature:28.8125 //转换温度
printf("temprature:%.4f\n",((id[1]<<8) | id[0]) * 6.25 /100);
这里只考虑了正数温度,关于*6.25/100,参考数据手册:"温度传感器的精度为用户可编程的9、10、11或12位,分别以0.5°、0.25°、0.125°和0.0625°增量递增",程序选的是12bit分辨率,单位增量即为0.0625

 浙公网安备 33010602011771号
浙公网安备 33010602011771号