第014课 Jz2400_ARM异常与中断体系详解
第001节_概念引入与处理流程#
取个场景解释中断。
假设有个大房间里面有小房间,婴儿正在睡觉,他的妈妈在外面看书。
问:这个母亲怎么才能知道这个小孩醒?
- 过一会打开一次房门,看婴儿是否睡醒,让后接着看书
- 一直等到婴儿发出声音以后再过去查看,期间都在读书
第一种 叫做查询方式:
*优点:简单
*缺点: 累
写程序如何:
while(1)
{
1 read book(读书)
2 open door(开门)
if(睡)
return(read book)
else
照顾小孩
}
第二种叫中断方式:
- 优点:不累
- 缺点:复杂
写程序:
while(1)
{
read book
中断服务程序()//如何被调用?
{
处理照顾小孩
}
}
我们看看母亲被小孩哭声打断如何照顾小孩?
母亲的处理过程:
1 平时看书
2 发生了各种声音,如何处理这些声音
:: 有远处的猫叫(听而不闻,忽略)
:: 门铃声有快递(开门收快递)
:: 小孩哭声(打开房门,照顾小孩)
3 母亲的处理
:: 只会处理门铃声和小孩哭声
:: a 现在书中放入书签,合上书(保存现场)
:: b 去处理 (调用对应的中断服务程序)
:: c 继续看书(恢复现场)
不同情况,不同处理:
a 对于门铃:开门取快件
b 对于哭声:照顾小孩
我们将母亲的处理过程抽象化——母亲的头脑相当于CPU
耳朵听到声音会发送信号给脑袋,声音来源有很多种,有远处的猫叫,门铃声,小孩哭声。这些声音传入耳朵,再由耳朵传给大脑,除了这些可以中断母亲的看书,还有其他情况,比如身体不舒服,有只蜘蛛掉下来,对于特殊情况无法回避,必须立即处理
对比我们的arm系统
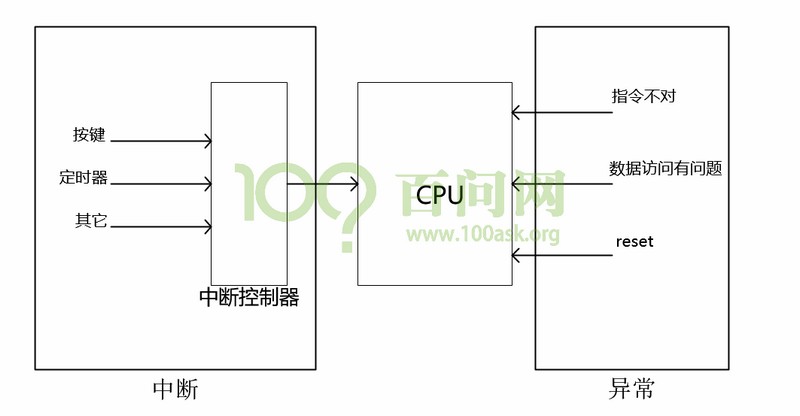
有CPU,有中断控制器。
中断控制器可以发信号给CPU告诉它发生了那些紧急情况
中断源有按键、定时器、有其它的(比如网络数据)
这些信号都可以发送信号给中断控制器,再由中断控制器发送信号给CPU表明有这些中断产生了,这些成为中断(属于一种异常)
还有什么可以中断CPU运行?
指令不对,数据访问有问题
reset信号,这些都可以中断CPU 这些成为异常中断
重点在于保存现场以及恢复现场
处理过程
a 保存现场(各种寄存器)
b 处理异常(中断属于一种异常)
c 恢复现场
arm对异常(中断)处理过程
1 初始化:
:: a 设置中断源,让它可以产生中断
:: b 设置中断控制器(可以屏蔽某个中断,优先级)
:: c 设置CPU总开关,(使能中断)
2 执行其他程序:正常程序
3 产生中断:按下按键--->中断控制器--->CPU
4 cpu每执行完一条指令都会检查有无中断/异常产生
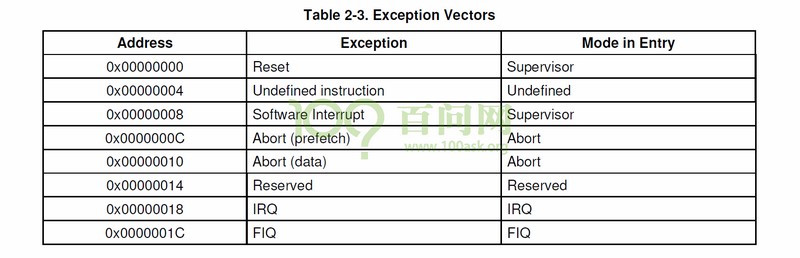
5 发现有中断/异常产生,开始处理。对于不同的异常,跳去不同的地址执行程序。这地址上,只是一条跳转指令,跳去执行某个函数(地址),这个就是异常向量。如下就是异常向量表,对于不同的异常都有一条跳转指令。
.globl _start
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq //发生中断时,CPU跳到这个地址执行该指令 **假设地址为0x18**
ldr pc, _fiq
//我们先在0x18这里放 ldr pc ,__irq,于是cpu最终会跳去执行__irq代码
//保护现场,调用处理函数,恢复现场
(3-5都是硬件强制做的)
6 这些函数做什么事情?
:: 软件做的:
:: a 保存现场(各种寄存器)
:: b 处理异常(中断):
:::: 分辨中断源
:::: 再调用不同的处理函数
:: c 恢复现场
对比母亲的处理过程来比较arm中断的处理过程。
中断处理程序怎么被调用?
CPU--->0x18 --跳转到其他函数->
:: 做保护现场
:: 调用函数
:::: 分辨中断源
:::: 调用对应函数
:: 恢复现场
cpu到0x18是由硬件决定的,跳去执行更加复杂函数(由软件决定)
第002节_CPU模式(Mode)_状态(State)与寄存器#
这节课我们来讲CPU的工作模式(Mode) 状态(State)寄存器
7种Mode:
usr/sys
undefined(und)
Supervisor(svc)
Abort(abt)
IRQ(irq)
FIQ(fiq)
2种State:
ARM state
Thumb state
寄存器:
通用寄存器
备份寄存器(banked register)
当前程序状态寄存器(Current Program Status Register);CPSR
CPSR的备份寄存器:SPSR(Save Program Status Register)
我们仍然以这个母亲为例讲解这个CPU模式
这个母亲无压力看书 -->(正常模式)
要考试,看书--->(兴奋模式)
生病---->(异常模式)
可以参考书籍 《ARM体系结构与编程》作者:杜春雷
对于ARM CPU有7种模式:
1 usr :类比 正常模式
2 sys :类比的话兴奋模式
3 5种异常模式:(2440用户手册72页)
:: 3.1 und :未定义模式
:: 3.2 svc :管理模式
:: 3.3 abt :终止模式
:::: a 指令预取终止(读写某条错误的指令导致终止运行)
:::: b 数据访问终止 (读写某个地址,这个过程出错)
:::: 都会进入终止模式
:: 3.4 IRQ: 中断模式
:: 3.5 FIQ: 快中断模式
我们可以称以下6种为特权模式
und :未定义模式
svc :管理模式
abt :终止模式
IRQ :中断模式
FIQ :快中断模式
sys :系统模式
usr用户模式(不可直接进入其他模式) 可以编程操作CPSR直接进入其他模式
这个图是有关各个模式下能访问寄存器的,再讲这个图之前我们先引入 2种state
CPU有两种state:
- 1 ARM state:使用ARM指令集,每个指令4byte
- 2 Thumb state:使用的是Thumb指令集,每个指令2byte
比如同样是:
mov R0, R1 编译后
对于ARM指令集要占据4个字节:机器码
对于Thumb指令集占据2个字节:机器码
引入Thumb减少存储空间
ARM指令集与Thumb指令集的区别:
Thumb 指令可以看作是 ARM 指令压缩形式的子集,是针对代码密度的问题而提出的,它具有 16 位的代码密度但是它不如ARM指令的效率高 .
Thumb 不是一个完整的体系结构,不能指望处理只执行Thumb 指令而不支持 ARM 指令集.
因此,Thumb 指令只需要支持通用功能,必要时可以借助于完善的 ARM 指令集,比如,所有异常自动进入 ARM 状态.在编写 Thumb 指令时,先要使用伪指令 CODE16 声明,而且在 ARM 指令中要使用 BX指令跳转到 Thumb 指令,以切换处理器状态.编写 ARM 指令时,则可使用伪指令 CODE32声明.
下节课会演示使用Thumb指令集编译,看是否生成的bin文件会变小很多
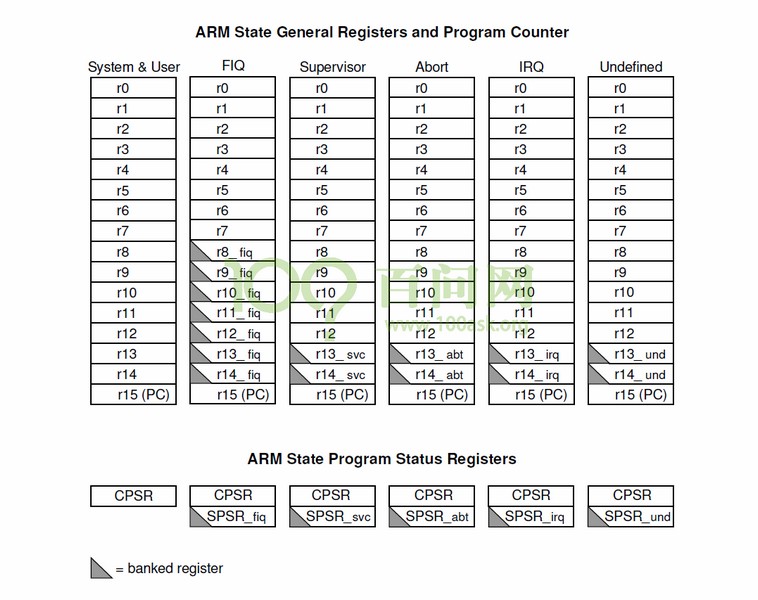
在每种模式下都有R0 ~ R15
在这张图注意到有些寄存器画有灰色的三角形,表示访问该模式下访问的专属寄存器
比如
mov R0, R8
mov R0, R8
在System 模式下访问的是R0 ~ R8,在所有模式下访问R0都是同一个寄存器
mov R0,R8_fiq
但是在FIQ模式下,访问R8是访问的FIQ模式专属的R8寄存器,不是同一个物理上的寄存器
在这五种异常模式中每个模式都有自己专属的R13 R14寄存器,R13用作SP(栈) R14用作LR(返回地址)
LR是用来保存发生异常时的指令地址
为什么快中断(FIQ)有那么多专属寄存器,这些寄存器称为备份寄存器
回顾一下中断的处理过程
- 1 保存现场(保存被中断模式的寄存器)
就比如说我们的程序正在系统模式/用户模式下运行,当你发生中断时,需要把R0 ~ R14这些寄存器全部保存下来,让后处理异常,最后恢复这些寄存器
但如果是快中断,那么我就不需要保存 系统/用户模式下的R8 ~ R12这几个寄存器,在FIQ模式下有自己专属的R8 ~ R12寄存器,省略保存寄存器的时间,加快处理速度
但是在Linux中并不会使用FIQ模式
-
2 处理
-
3 恢复现场
CRSR当前程序状态寄存器,这是一个特别重要的寄存器
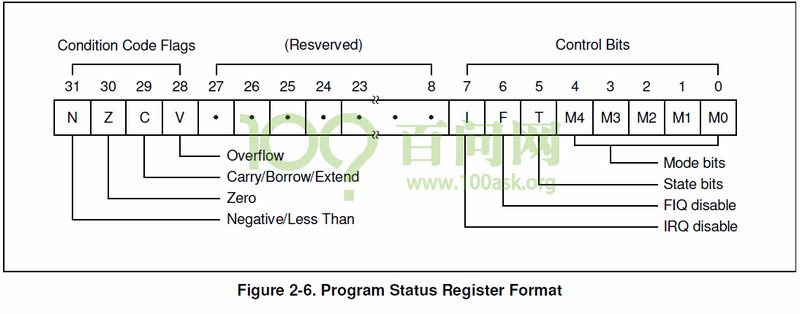
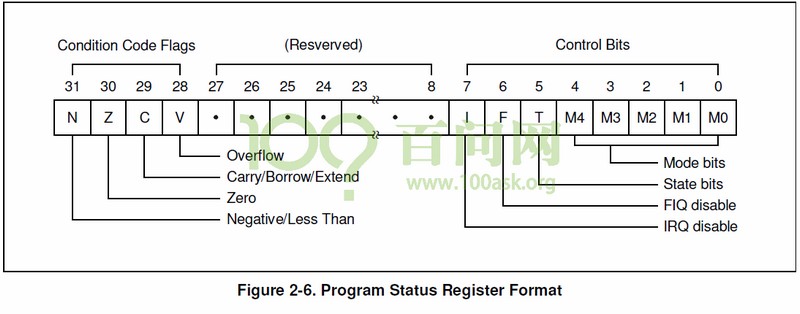
SPSR保存的程序状态寄存器,他们格式如下:
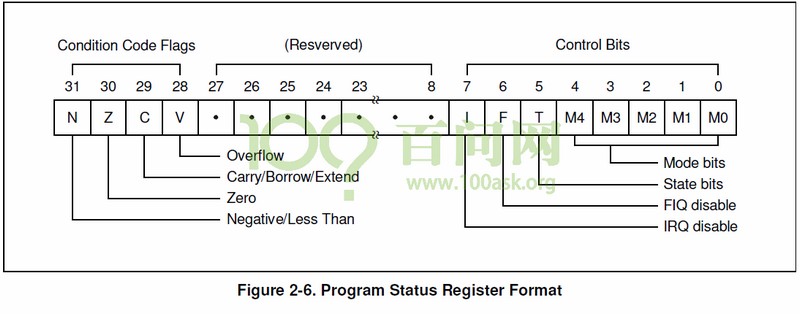
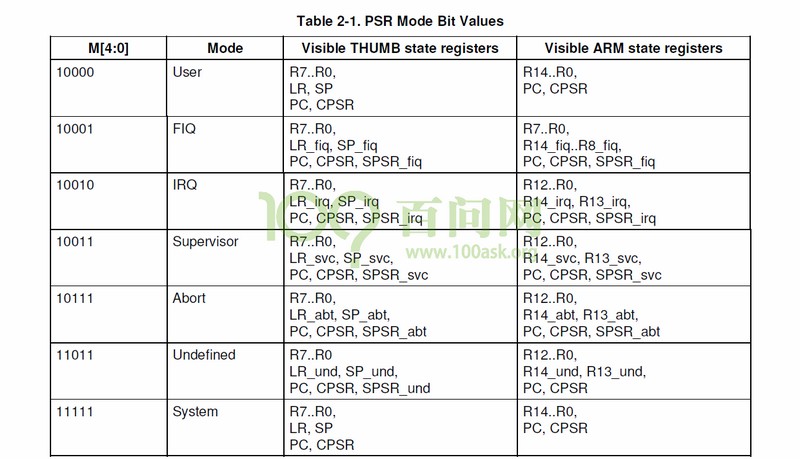
首先 M4 ~ M0 表示当前CPU处于哪一种模式(Mode);
我们可以读取这5位来判断CPU处于哪一种模式,也可以修改这一种模式位,让其修改这种模式;
假如你当前处于用户模式下,是没有权限修改这些位的;
M4 ~ M0对应什么值,会有说明:
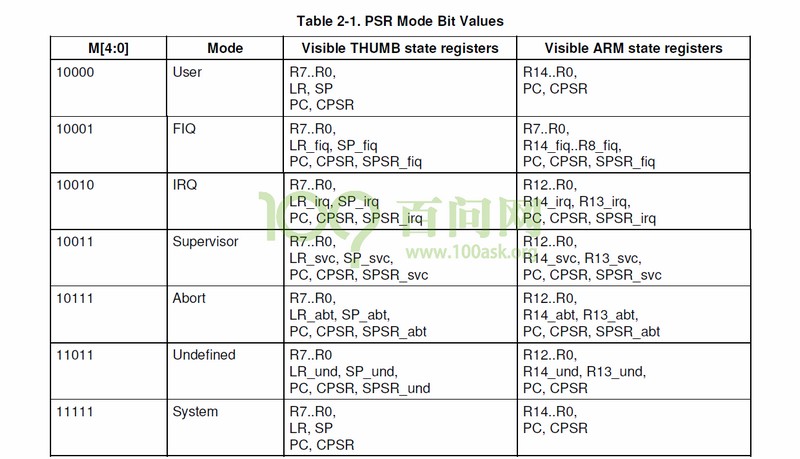
查看其他位
Bit5 State bits表示CPU工作与Thumb State还是ARM State用的指令集是什么
Bit6 FIQ disable当bit6等于1时,FIQ是不工作的
Bit7 IRQ disable当bit5等于1时,禁止所有的IRQ中断,这个位是IRQ的总开关
Bit8 ~ Bit27是保留位
Bite28 ~ Bit31是状态位,
什么是状态位,比如说执行一条指令
cmp R0, R1
如果R0 等于 R1 那么zero位等于1,这条指令影响 Z 位,如果R0 == R1,则Z = 1
beq跳转到xxx这条指令会判断Bit30是否为1,是1的话则跳转,不是1的话则不会跳转
使用 Z 位,如果 Z 位等于1 则跳转,这些指令是借助状态位实现的
SPSR保存的程序状态寄存器:
表示发生异常时这个寄存器会用来保存被中断的模式下他的CPSR
就比如我我的程序在系统模式下运行 CPSR是某个值,当发生中断时会进入irq模式,这个CPSR_irq就保存系统模式下的CPSR
我们来看看发生异常时CPU是如何协同工作的:
进入异常的处理流程(硬件)
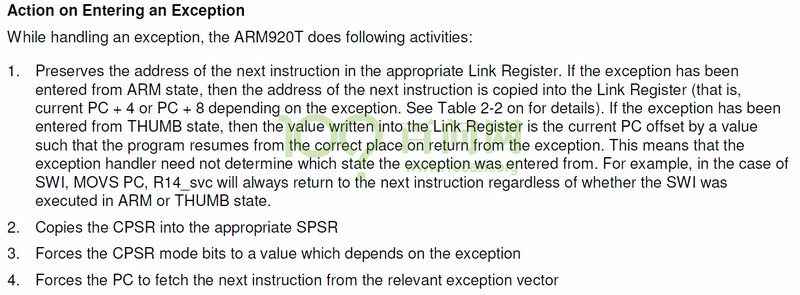
我们来翻译一下:
发生异常时,我们的CPU会做什么事情
- 1把下一条指令的地址保存在LR寄存器里(某种异常模式的LR等于被中断的下一条指令的地址)
它有可能是PC + 4有可能是PC + 8,到底是那种取决于不同的情况
-
2 把CPSR保存在SPSR里面(某一种异常模式下SPSR里面的值等于CPSR)
-
3 修改CPSR的模式为进入异常模式(修改CPSR的M4 ~ M0进入异常模式)
-
4 跳到向量表
退出异常怎么做?

- 1 让LR减去某个值,让后赋值给PC(PC = 某个异常LR寄存器减去 offset)
减去什么值呢?
也就是我们怎么返回去继续执行原来的程序,根据下面这个表来取值
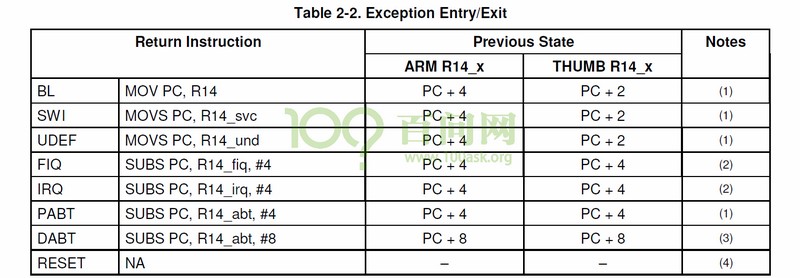
如果发生的是SWI可以把 R14_svc复制给PC
如果发生的是IRQ可以把R14_irq的值减去4赋值给PC
-
2 把CPSR的值恢复(CPSR 值等于 某一个一场模式下的SPSR)
-
3 清中断(如果是中断的话,对于其他异常不用设置)
第003节_不重要_Thumb指令集程序示例#
在上节视频里说ARMCPU有两种状态
ARM State 每条指令会占据4byte
Thumb State 每条指令占据2byte
我们说过Thumb指令集并不重要,本节演示把一个程序使用Thumb指令集来编译它
使用上一章节的重定位代码,打开Makefile和Start.S
Makefile文件
all:
arm-linux-gcc -c -o led.o led.c
arm-linux-gcc -c -o uart.o uart.c
arm-linux-gcc -c -o init.o init.c
arm-linux-gcc -c -o main.o main.c
arm-linux-gcc -c -o start.o start.S
#arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-ld -T sdram.lds start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-objcopy -O binary -S sdram.elf sdram.bin
arm-linux-objdump -D sdram.elf > sdram.dis
clean:
rm *.bin *.o *.elf *.dis
对于使用Thumb指令集
all:
arm-linux-gcc -mthumb -c -o led.o led.c//只需要在arm-linux-gcc加上 mthumb命令即可
arm-linux-gcc -c -o uart.o uart.c
arm-linux-gcc -c -o init.o init.c
arm-linux-gcc -c -o main.o main.c
arm-linux-gcc -c -o start.o start.S
#arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-ld -T sdram.lds start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-objcopy -O binary -S sdram.elf sdram.bin
arm-linux-objdump -D sdram.elf > sdram.dis
clean:
rm *.bin *.o *.elf *.dis
改进
all: led.o uart.o init.o main.o start.o //all依赖led.o uart.o init.o main.o start.o
#arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-ld -T sdram.lds start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-objcopy -O binary -S sdram.elf sdram.bin
arm-linux-objdump -D sdram.elf > sdram.dis
clean:
rm *.bin *.o *.elf *.dis
%.o : %.c
arm-linux-gcc -mthumb -c -o $@ $< //对于所有的.c文件使用规则就可以使用thumb指令集编译 $@表示目标 $<表示第一个依赖
%.o : %.S
arm-linux-gcc -c -o $@ $<
```
对start.S需要修改代码
原重定位章节Start.S文件
```c
.text
.global _start
_start:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
使用thumb指令集的Start.S文件
.text
.global _start
.code 32 //表示后续的指令使用ARM指令集
_start:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
/* 怎么从ARM State切换到Thumb State? */
adr r0, thumb_func //定义此标号的地址
add r0, r0, #1 /* bit0=1时, bx就会切换CPU State到thumb state */
bx r0
.code 16 //下面都使用thumb指令集
thumb_func: //需要得到这个标号的地址
/*下面就是使用thumb指令来执行程序*/
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr r0, =main /* 绝对跳转, 跳到SDRAM ,先把main的地址赋值给R0 */
mov pc, r0 /*让后再移动到PC*/
halt:
b halt
上传代码编译测试
出现错误,如下
init.o(.text+0x6c):In function 'sdram_init2';
undefined reference to 'memcpy'
发现是init,o里sdram_init2使用的了memcpy函数
查看init.c
#include "s3c2440_soc.h"
void sdram_init(void)
{
BWSCON = 0x22000000;
BANKCON6 = 0x18001;
BANKCON7 = 0x18001;
REFRESH = 0x8404f5;
BANKSIZE = 0xb1;
MRSRB6 = 0x20;
MRSRB7 = 0x20;
}
#if 0
/**************************************************************************
* 设置控制SDRAM的13个寄存器
* 使用位置无关代码
**************************************************************************/
void memsetup(void)
{
unsigned long *p = (unsigned long *)MEM_CTL_BASE;
p[0] = 0x22111110; //BWSCON
p[1] = 0x00000700; //BANKCON0
p[2] = 0x00000700; //BANKCON1
p[3] = 0x00000700; //BANKCON2
p[4] = 0x00000700; //BANKCON3
p[5] = 0x00000700; //BANKCON4
p[6] = 0x00000700; //BANKCON5
p[7] = 0x00018005; //BANKCON6
p[8] = 0x00018005; //BANKCON7
p[9] = 0x008e07a3; //REFRESH,HCLK=12MHz:0x008e07a3,HCLK=100MHz:0x008e04f4
p[10] = 0x000000b2; //BANKSIZE
p[11] = 0x00000030; //MRSRB6
p[12] = 0x00000030; //MRSRB7
}
#endif
/*下面函数使用了memcpy函数,显然是编译器的操作,使用了memcpy把数组里的值从代码段拷贝到了arr局部变量里
是否可以禁用掉memcpy*/
void sdram_init2(void)
{
unsigned int arr[] = {
0x22000000, //BWSCON
0x00000700, //BANKCON0
0x00000700, //BANKCON1
0x00000700, //BANKCON2
0x00000700, //BANKCON3
0x00000700, //BANKCON4
0x00000700, //BANKCON5
0x18001, //BANKCON6
0x18001, //BANKCON7
0x8404f5, //REFRESH,HCLK=12MHz:0x008e07a3,HCLK=100MHz:0x008e04f4
0xb1, //BANKSIZE
0x20, //MRSRB6
0x20, //MRSRB7
};
volatile unsigned int * p = (volatile unsigned int *)0x48000000;
int i;
for (i = 0; i < 13; i++)
{
*p = arr[i];
p++;
}
}
文章说没有什么方法禁用memecpy但是可以修改这些变量
比如说将其修改为静态变量,这些数据就会放在数据段中,最终重定位时会把数据类拷贝到对应的arr地址里面去
void sdram_init2(void)
{
const static unsigned int arr[] = { //加上const 和static
0x22000000, //BWSCON
0x00000700, //BANKCON0
0x00000700, //BANKCON1
0x00000700, //BANKCON2
0x00000700, //BANKCON3
0x00000700, //BANKCON4
0x00000700, //BANKCON5
0x18001, //BANKCON6
0x18001, //BANKCON7
0x8404f5, //REFRESH,HCLK=12MHz:0x008e07a3,HCLK=100MHz:0x008e04f4
0xb1, //BANKSIZE
0x20, //MRSRB6
0x20, //MRSRB7
};
volatile unsigned int * p = (volatile unsigned int *)0x48000000;
int i;
for (i = 0; i < 13; i++)
{
*p = arr[i];
p++;
}
}
拷贝进行实验
得出bin文件有1.4k左右
查看之前的文件使用ARM指令集是2K左右
查看反汇编代码
sdram.elf: file format elf32-littlearm
Disassembly of section .text:
/*前面这些ARM指令还是占用4个字节*/
30000000 <_start>:
30000000: e3a00453 mov r0, #1392508928 ; 0x53000000
30000004: e3a01000 mov r1, #0 ; 0x0
30000008: e5801000 str r1, [r0]
3000000c: e3a00313 mov r0, #1275068416 ; 0x4c000000
30000010: e3e01000 mvn r1, #0 ; 0x0
30000014: e5801000 str r1, [r0]
30000018: e59f005c ldr r0, [pc, #92] ; 3000007c <.text+0x7c>
3000001c: e3a01005 mov r1, #5 ; 0x5
30000020: e5801000 str r1, [r0]
30000024: ee110f10 mrc 15, 0, r0, cr1, cr0, {0}
30000028: e3800103 orr r0, r0, #-1073741824 ; 0xc0000000
3000002c: ee010f10 mcr 15, 0, r0, cr1, cr0, {0}
30000030: e59f0048 ldr r0, [pc, #72] ; 30000080 <.text+0x80>
30000034: e59f1048 ldr r1, [pc, #72] ; 30000084 <.text+0x84>
30000038: e5801000 str r1, [r0]
3000003c: e3a01000 mov r1, #0 ; 0x0
30000040: e5910000 ldr r0, [r1]
30000044: e5811000 str r1, [r1]
30000048: e5912000 ldr r2, [r1]
3000004c: e1510002 cmp r1, r2
30000050: e59fd030 ldr sp, [pc, #48] ; 30000088 <.text+0x88>
30000054: 03a0da01 moveq sp, #4096 ; 0x1000
30000058: 05810000 streq r0, [r1]
3000005c: e28f0004 add r0, pc, #4 ; 0x4
30000060: e2800001 add r0, r0, #1 ; 0x1
30000064: e12fff10 bx r0
30000068 <thumb_func>:
30000068: f94ef000 bl 30000308 <sdram_init>
3000006c: f9fef000 bl 3000046c <copy2sdram>
30000070: fa24f000 bl 300004bc <clean_bss>
/**下面的thumb指令占据2个字节**/
30000074: 4805 ldr r0, [pc, #20] (3000008c <.text+0x8c>)
30000076: 4687 mov pc, r0
30000078 <halt>:
30000078: e7fe b 30000078 <halt>
3000007a: 0000 lsl r0, r0, #0
3000007c: 0014 lsl r4, r2, #0
3000007e: 4c00 ldr r4, [pc, #0] (30000080 <.text+0x80>)
30000080: 0004 lsl r4, r0, #0
30000082: 4c00 ldr r4, [pc, #0] (30000084 <.text+0x84>)
30000084: c011 stmia r0!,{r0, r4}
30000086: 0005 lsl r5, r0, #0
30000088: 1000 asr r0, r0, #0
3000008a: 4000 and r0, r0
3000008c: 04fd lsl r5, r7, #19
3000008e: 3000 add r0, #0
如果你的flash很小的话可以考虑使用Thumb指令集
烧写进去看是否可以运行
测试结果没有任何问题
Thumb指令集后面没有任何作用,只是简单作为介绍
第004节_und异常模示程序示例#
写一个程序故意让其发生未定义异常,让后处理这个异常
查看uboot中源码uboot\u-boot-1.1.6\cpu\arm920t
打开start.S
/*code: 28 -- 72*/
#include <config.h>
#include <version.h>
/*
*************************************************************************
*
* Jump vector table as in table 3.1 in [1]
*
*************************************************************************
*/
#define GSTATUS2 (0x560000B4)
#define GSTATUS3 (0x560000B8)
#define GSTATUS4 (0x560000BC)
#define REFRESH(0x48000024)
#define MISCCR (0x56000080)
#define LOCKTIME 0x4C000000 /* R/W, PLL lock time count register */
#define MPLLCON 0x4C000004 /* R/W, MPLL configuration register */
#define UPLLCON 0x4C000008 /* R/W, UPLL configuration register */
#define CLKCON 0x4C00000C /* R/W, Clock generator control reg. */
#define CLKSLOW 0x4C000010 /* R/W, Slow clock control register */
#define CLKDIVN 0x4C000014 /* R/W, Clock divider control */
/******下面这些就是异常向量表*****/
.globl _start
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
_undefined_instruction: .word undefined_instruction
_software_interrupt: .word software_interrupt
_prefetch_abort: .word prefetch_abort
_data_abort: .word data_abort
_not_used: .word not_used
_irq: .word irq
_fiq: .word fiq
.balignl 16,0xdeadbeef
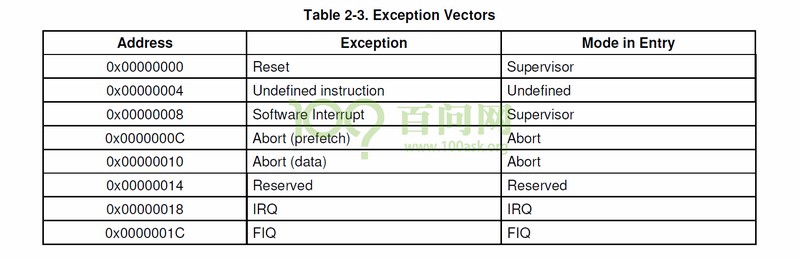
手册异常向量表定义
接下来我们写程序
.text
.global _start
_start:
b reset /* vector 0 : reset */ //一上电复位,是从0地址开始执行,跳到reset处
b do_und /* vector 4 : und */ //如果发生未定义指令异常,就会跳到0x04地址未定义指令异常处,执行do_und程序
/*假设一上电从0地址开始执行,reset,做一系列初始化之后
*故意加入一条未定义指令
und_code:
.word 0xdeadc0de /* 未定义指令 */
当CPU发现无法执行此条指令时,就会发生未定义指令异常,就会执行do_und
bl print2,
*/
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
//需要从新设置sp栈,指向某一块没有使用的地址
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* 发生异常时,当前被中断的地址会保存在lr寄存器中 先减后存*/
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr//把cpsr的值读入r0
ldr r1, =und_string//把下面的字符串地址赋值给r1
bl printException
/* 这些寄存器保存在栈中,把他读取出来就可以了*/
/* 恢复现场 */
/* 先读后加*/
/* 把r0 ~ r12的值从栈中都取出来,并且把原来保存的lr值,赋值到pc中去*/
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
/*
*如何定义字符串,可以百度搜索 arm-linux-gcc 汇编 定义字符串
*
*官方的说明文档
*http://web.mit.edu/gnu/doc/html/as_7.html
.string "str"
Copy the characters in str to the object file. You may specify more than one string to copy, separated by commas. Unless otherwise specified for a particular machine, the assembler marks the end of each string with a 0 byte. You can use any of the escape sequences described in section Strings.
我们使用.str会自动加上结束符
*/
und_string:
.string "undefined instruction exception"
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xff123456 /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
如何处理这个异常呢?
直接print打印一句话,新建一个exception.c文件
#include "uart.h"
void printException(unsigned int cpsr, char *str) //cpsr打印相应的寄存器,str打印一个字符串
{
puts("Exception! cpsr = ");\\打印cpsr
printHex(cpsr);//输出cpsr的值
puts(" ");//输出空格
puts(str);//输出str值
puts("\n\r");//回车,换行
}
我们打开之前编译过的程序的反汇编文件
里面一定包含了保存恢复
30000084 <delay>:
30000084: e1a0c00d mov ip, sp
30000088: e92dd800 stmdb sp!, {fp, ip, lr, pc} //保存 d是减 b是存
3000008c: e24cb004 sub fp, ip, #4 ; 0x4
30000090: e24dd004 sub sp, sp, #4 ; 0x4
30000094: e50b0010 str r0, [fp, #-16]
30000098: e51b3010 ldr r3, [fp, #-16]
3000009c: e2433001 sub r3, r3, #1 ; 0x1
300000a0: e50b3010 str r3, [fp, #-16]
300000a4: e51b3010 ldr r3, [fp, #-16]
300000a8: e3730001 cmn r3, #1 ; 0x1
300000ac: 0a000000 beq 300000b4 <delay+0x30>
300000b0: eafffff8 b 30000098 <delay+0x14>
300000b4: e89da808 ldmia sp, {r3, fp, sp, pc}//恢复,先读后加
上传编译
修改makefile添加文件
all: start.o led.o uart.o init.o main.o exception.o
#arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf
arm-linux-ld -T sdram.lds $^ -o sdram.elf
#用$ ^来包含所有的依赖
arm-linux-objcopy -O binary -S sdram.elf sdram.bin
arm-linux-objdump -D sdram.elf > sdram.dis
clean:
rm *.bin *.o *.elf *.dis
%.o : %.c
arm-linux-gcc -c -o $@ $<
%.o : %.S
arm-linux-gcc -c -o $@ $<
*.dis
编译成功烧写
没有输出我们想要的字符串
很多同学想学会如何调试程序
这里我们演示
sdram:
bl print1 //添加print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2 //添加print2,实现这两个函数,来打印
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
实现print1 print2这两个打印函数,在uart.c这个文件里
void print1(void)
{
puts("abc\n\r");
}
void print2(void)
{
puts("123\n\r");
}
上传代码烧写,发现print1、print2并未执行成功
发现在start.S并未初始化 uart0_init(),删除main.c中的uart0_init()初始化函数
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xff123456 /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
加上uart0_init,再次编译烧写
程序正常运行,print1 print2全部打印,表明未定义指令并未运行,难道这个地址是一个已经定义的地址
打开2440芯片手册,找到ARM指令集
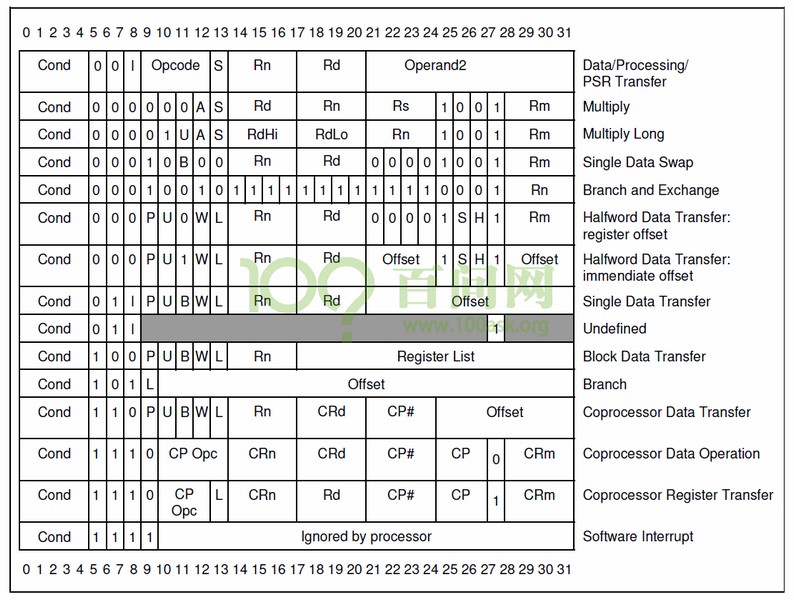
发现竟然是SWI指令,CPU可以识别出来,他不是一条未定义指令
我们得找到一条CPU不能识别的指令,定义为0x03000000
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0x03000000 /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
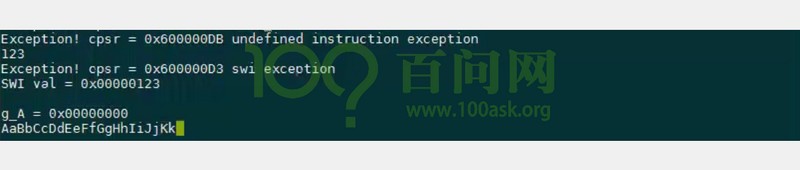
编译烧写执行
打印了未定义指令异常CPSR地址,打印了字符串,最后执行main函数
.word 0xdeadcode /* 也是一条未定义指令 只要指令地址对不上上表就是未定义指令*/
我们查看下cpsr是否处于未定义模式
bit[4:0]表示CPU模式 11011,果然处于und模式
我们看看这个程序做了什么事情
.text
.global _start
/*一上电复位,从0地址开始执行
跳到 reset:
做了一系列初始化
当执行到0xdeadc0de这条指令时候,CPU根本就不知道这条指令什么意思
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
让后就发生未定义指令异常,他会把下一条指令的地址保存到异常模式的LR寄存器
/* 执行到这里之前已经发生了很多事情
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*
* 设置栈 sp是指und的地址
* sp_und未设置, 先设置它
* /* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
* lr是异常处理完后的返回地址, 也要保存 */
* 保存现场 */
* 处理und异常 */
* 恢复sp
* cpu就会切换到之前的模式
*/
*/
.text
.global _start
_start:
b reset /* vector 0 : reset */
b do_und /* vector 4 : und */
und_addr:
.word do_und
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
程序改进
源程序
.text
.global _start
_start:
b reset /* vector 0 : reset */
/*使用b命令跳转 相对跳转*/
b do_und /* vector 4 : und */
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
/*这里又使用bl指令跳转,如果是nand启动,这个函数在4k之外,这个函数必定出错 为了保险,跳转到sdram中执行程序*/
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
改进后代码
.text
.global _start
_start:
b reset /* vector 0 : reset */
/*跳转到sdram执行这个函数,那么这个函数一定在sdram中
我们需要指定让他去前面这块内存去读这个值,担心如果这个文件很大,超过4Knand就没法去读这个文件*/
ldr pc, und_addr /* vector 4 : und */
/*增加如下 查看反汇编,在08的地址读让后跳到3c*/
und_addr:
.word do_und
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
/**如果你的程序长度稍有变化,就不能保证运行
加上 .align 4才能保证后面的程序以4字节对齐,保证程序运行
**/
.align 4
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
/*把链接地址赋值给pc 直接就跳转到sdram中*/
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
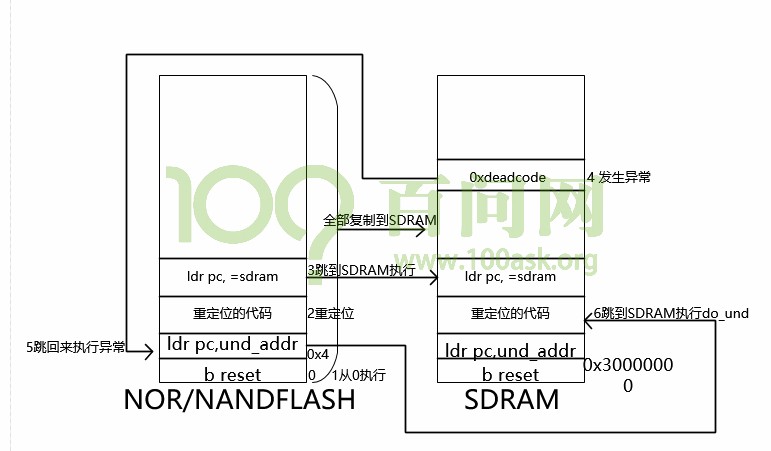
看一下整个程序的执行过程
第005节_swi异常模示程序示例#
这节我们再来演示swi的处理流程
swi软件中断:software interrupt
在前面的视频中我们讲过ARMCPU有7中模式,除了用户模式以外,其他6种都是特权模式,这些特权模式可以直接修改CPSR进入其他模式
usr用户模式不能修改CPSR进入其他模式
Linux应用程序一般运行于用户模式
APP运行于usermode,(受限模式,不可访问硬件)
APP想访问硬件,必须切换模式,怎么切换?
发生异常3种模式
:: 中断是一种异常
:: und也是
:: swi + 某个值(使用软中断切换模式)
现在start.S把要做的事情列出来
/*1
/* 复位之后, cpu处于svc模式
* 现在, 切换到usr模式
* 设置栈
* 跳转执行
*/
/*2 故意引入一条swi指令*/
/*3 需在_start这里放一条swi指令*/
查看异常向量表swi异常的向量地址是0x8
我们先切换到usr模式下
usr模式下的 M0 ~ M4是10000
/**5 先进入usr模式*/
mrs r0, cpsr /* 读出cpsr 读到r0 */
/使用bic命令 bitclean 把低4位清零/
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
msr cpsr, r0
/*6 设置栈*/
/* 设置 sp_usr */
ldr sp, =0x33f00000
编译运行
发现可以处理und指令
添加 swi异常,仿照未定义指令做
.text
.global _start
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
/*1 添加swi指令*/
ldr pc, swi_addr /* vector 8 : swi */
und_addr:
.word do_und
/*2 仿照und未定义添加指令*/
swi_addr:
.word do_swi
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
/*3 复制do_und修改为swi */
do_swi:
/* 执行到这里之前:
* 3.1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 3.2. SPSR_svc保存有被中断模式的CPSR
* 3.3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 3.4. 跳到0x08的地方执行程序
*/
/* 3.5 sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 3.6 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* 3.7 lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 3.8 保存现场 */
/* 3.9 处理swi异常 只是打印 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
/*3.10 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
/*swi处理函数*/
swi_string:
.string "swi exception"
上传代码实验
烧写 发现没有执行
我们先把下面这些代码注释掉
/*3 复制do_und 修改为swi */
/* 执行到这里之前:
* 3.1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 3.2. SPSR_svc保存有被中断模式的CPSR
* 3.3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 3.4. 跳到0x08的地方执行程序
*/
/* 3.5 sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 3.6 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* 3.7 lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 3.8 保存现场 */
/* 3.9 处理swi异常 只是打印 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
/*3.10 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
/* swi处理函数 */
swi_string:
.string "swi exception"
上传编译
烧写执行 可以正常运行
循环打印
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
执行后继续执行
ldr pc, swi_addr /* vector 8 : swi */
表明问题出现在 do_swi:函数中
先把下面这句话注释掉
.string "swi exception"
编译烧写运行
程序可以正常运行
显然程序问题出现在.string "swi exception" 这句话,为什么加上这句话程序就无法执行,查看一下反汇编:
30000064 <swi_string>: //这里地址是64
30000064: 20697773 rsbcs r7, r9, r3, ror r7
30000068: 65637865 strvsb r7, [r3, #-2149]!
3000007c: 6f697470 swivs 0x00697470
30000070: 0000006e andeq r0, r0, lr, rrx
30000082 <reset>: //我们使用的是ARM指令集,应该是4字节对齐,发现这里并不是,问题就在这里
30000082: e3a00453 mov r0, #1392508928 ; 0x53000000
30000086: e3a01000 mov r1, #0 ; 0x0
3000008a: e5801000 str r1, [r0]
3000008e: e3a00313 mov r0, #1275068416 ; 0x4c000000
30000092: e3e01000 mvn r1, #0 ; 0x0
因为这个字符串长度有问题
前面und_string 那里的字符串长度刚刚好
我们不能把问题放在运气上面
添加:
/*******
以4字节对齐
*/
.align 4
do_swi:
/* 执行到这里之前:
* 3.1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 3.2. SPSR_svc保存有被中断模式的CPSR
* 3.3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 3.4. 跳到0x08的地方执行程序
*/
/* 3.5 sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 3.6 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* 3.7 lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 3.8 保存现场 */
/* 3.9 处理swi异常 只是打印 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
/*3.10 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
/*****
swi处理函数
*/
swi_string:
.string "swi exception"
.align 4
/**************
表明下面的标号要放在4字节对齐的地方
*/
上传代码编译运行查看反汇编:
30000068 <swi_string>:
30000068: 20697773 rsbcs r7, r9, r3, ror r7
3000006c: 65637865 strvsb r7, [r3, #-2149]!
30000070: 6f697470 swivs 0x00697470
30000074: 0000006e andeq r0, r0, lr, rrx
...
30000080 <reset>: //现在reset放在4自己对齐的地方
30000080: e3a00453 mov r0, #1392508928 ; 0x53000000
30000084: e3a01000 mov r1, #0 ; 0x0
30000088: e5801000 str r1, [r0]
3000008c: e3a00313 mov r0, #1275068416 ; 0x4c000000
30000090: e3e01000 mvn r1, #0 ; 0x0
30000094: e5801000 str r1, [r0]
30000098: e59f0084 ldr r0, [pc, #132] ; 30000124 <.text+0x124>
3000009c: e3a01005 mov r1, #5 ; 0x5
300000a0: e5801000 str r1, [r0]
300000a4: ee110f10 mrc 15, 0, r0, cr1, cr0, {0}
300000a8: e3700103 orr r0, r0, #-1073741824 ; 0xc0000000
300000ac: ee010f10 mcr 15, 0, r0, cr1, cr0, {0}
300000b0: e59f0070 ldr r0, [pc, #112] ; 30000128 <.text+0x128>
300000b4: e59f1070 ldr r1, [pc, #112] ; 3000012c <.text+0x12c>
300000b8: e5801000 str r1, [r0]
300000bc: e3a01000 mov r1, #0 ; 0x0
300000c0: e5910000 ldr r0, [r1]
下载烧写
程序执行完全没有问题
程序备份修改代码
swi可以根据应用程序传入的val来判断为什么调用swi指令,我们的异常处理函数能不能把这个val值读出来
do_swi:
/* 执行到这里之前:
* 1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_svc保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 4. 跳到0x08的地方执行程序
*/
/* sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 保存现场 */
/* 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 2
我们要把lr拿出来保存
因为bl printException会破坏lr
mov rX, lr
我把lr保存在那个寄存器?
这个函数 bl printException 可能会修改某些寄存器,但是又会恢复这些寄存器,我得知道他会保护那些寄存器
我们之前讲过ATPCS规则
对于 r4 ~ r11在C函数里他都会保存这几个寄存器,如果用到的话就把他保存起来,执行完C函数再把它释放掉
我们把lr 保存在r4寄存器里,r4寄存器不会被C语言破坏
*/
mov r4, lr
/* 处理swi异常 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
/*1
跳转到printSWIVal
如何才能知道swi的值呢?
我们得读出swi 0x123指令,这条指令保存在内存中,我们得找到他的内存地址
执行完0x123指令以后,会发生一次异常,那个异常模式里的lr寄存器会保存下一条指令的地址
我们把lr寄存器的地址减去4就是swi 0x123这条指令的地址
*/
/*3
我再把r4的寄存器赋给r0让后打印
我们得写出打印函数
mov r0, r4
指令地址减4才可以
swi 0x123
下一条指令bl main 减4就是指令本身
*/
sub r0, r4, #4
bl printSWIVal
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
swi_string:
.string "swi exception"
```c
在uart.c添加printSWIVal打印函数
void printSWIVal(unsigned int *pSWI)
{
puts("SWI val = ");
printHEx(*pSWI & ~0xff000000); //高8位忽略掉
puts("\n\r");
}
编译实验运行没有问题
我们再来看看这个程序是怎么跳转的
/*1
发生swi异常,他是在sdram中,CPU就会跳到0x8的地方
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
*/
/* 2
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
执行这条读内存指令
ldr pc, swi_addr /* vector 8 : swi */
读到swi_addr地址跳转到sdram执行代码 do_swi那段代码
swi_addr:
.word do_swi
*/
/* 3
这段代码被设置栈保存现场 调用处理函数恢复现场,让后就会跳到sdram执行 swi 0x123的下一条指令
do_swi:
/* 执行到这里之前:
* 1. lr_svc保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_svc保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10011, 进入到svc模式
* 4. 跳到0x08的地方执行程序
*/
/* sp_svc未设置, 先设置它 */
ldr sp, =0x33e00000
/* 保存现场 */
/* 在swi异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
mov r4, lr
/* 处理swi异常 */
mrs r0, cpsr
ldr r1, =swi_string
bl printException
sub r0, r4, #4
bl printSWIVal
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
swi_string:
.string "swi exception"
*/
这节视频我们讲解了swi的处理流程
第006节_按键中断程序示例_概述与初始#
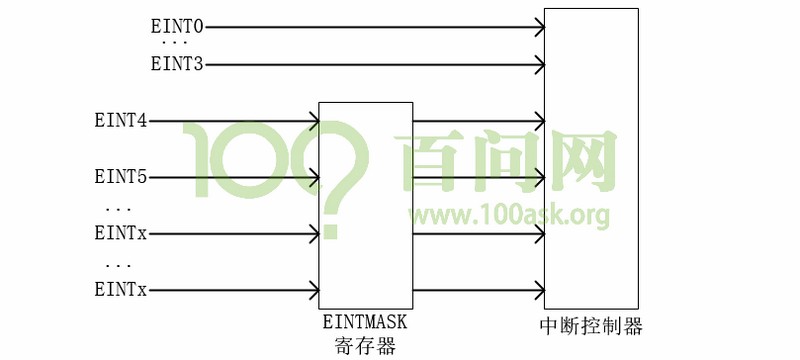
在前面的视频里我们举了一个例子,母亲看书被声音打断,远处的声音来源有多种多样,声音传入耳朵,再由耳朵传入大脑,整个过程涉及声音来源耳朵大脑,为了确保这个母亲看书的过程能够被声音打断,我们必须保证声音来源可以发出声音,耳朵没有聋,脑袋没有傻。
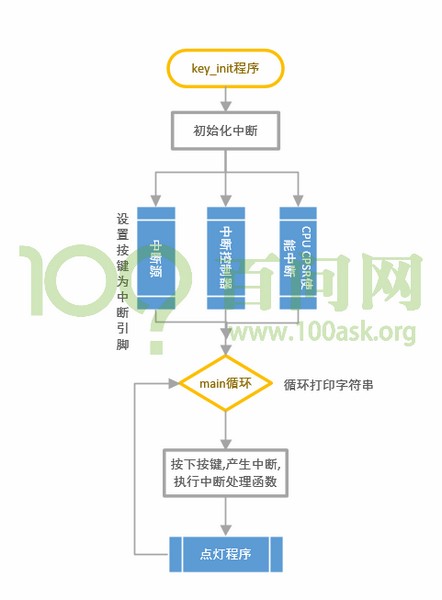
类比嵌入式系统我们可以设置中断源,让他发出中断信号,还需要设置中断控制器,让他把这些信号发送给CPU,还需要设置CPU让他能够处理中断。
中断的处理流程:
<1> 中断初始化:
:: 1.1 我们需要设置中断源,让它能够发出中断喜好
:: 1.2 设置中断控制器,让它能发出中断给CPU
:: 1.3 设置CPU,CPSR有I位,是总开关
:: 我们需要这样设置,中断源才能发送给CPU
<2> 处理完要清中断
<3> 处理时,要分辨中断源,对于不同的中断源要执行不同的处理函数
下面开始写代码
打开start.S 先做初始化工作,先做第 3 设置CPU,CPSR有I位,是总开关
我们需要把CPSR寄存器 bit7给清零,这是中断的总开关,如果bit7设置为1,CPU无法响应任何中断
/* 清除BSS段 */
bl clean_bss
/* 复位之后, cpu处于svc模式
* 现在, 切换到usr模式
*/
mrs r0, cpsr /* 读出cpsr */
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
/*1
把bit7这一位清零
*/
bic r0, r0, #(1<<7) /* 清除I位, 使能中断 */
msr cpsr, r0
/* 设置 sp_usr */
ldr sp, =0x33f00000
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
/*2 调用两个中断 */
bl interrupt_init /*初始化中断控制器*/
bl eint_init /*初始化按键,设为中断源*/
/*需要初始化上面这两个函数*/
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
添加一个 interrupt.c文件,这个程序稍微有些复杂,我们先画个流程图
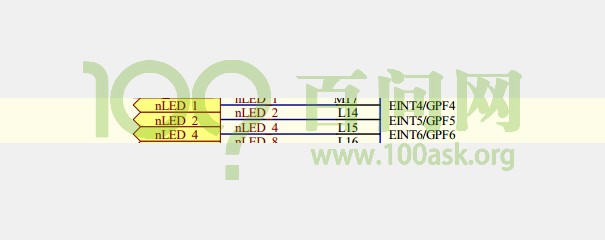
我们想达到按下按键灯亮松开按键灯灭,把下面四个按键全部配置为外部中断按键
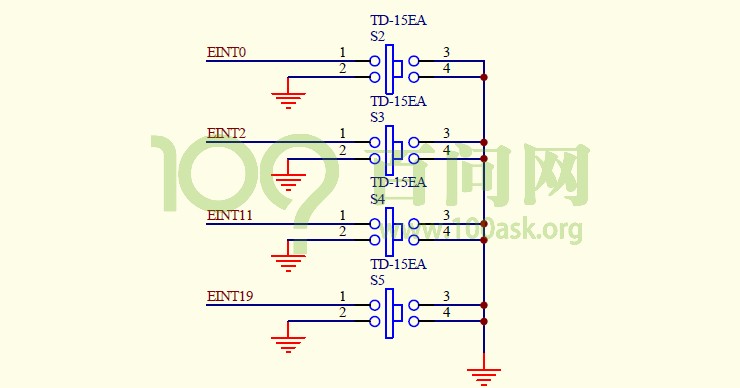
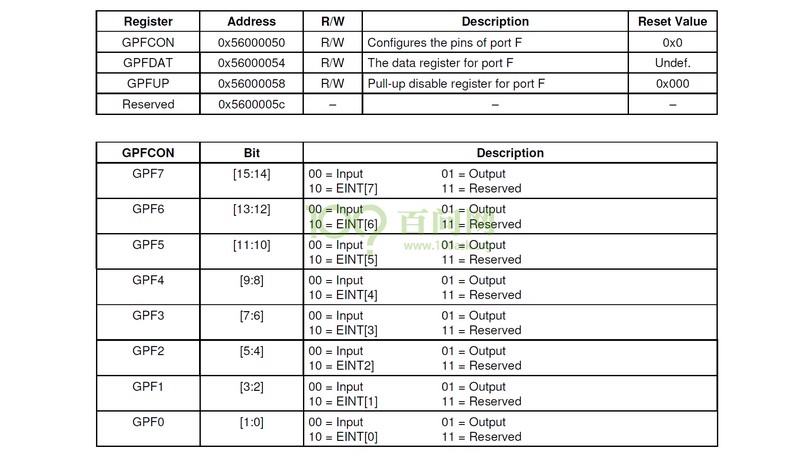
打开芯片手册找到第九章 IO ports,直接搜索“'EINT0号中断和EINT2号中断”',找配置寄存器 GPFCON
为了简单操作
/* 初始化按键, 设为中断源 */
void key_eint_init(void)
{
/*1 配置GPIO为中断引脚 */
//先把eint0和eint2这两个引脚清零
GPFCON &= ~((3<<0) | (3<<4));
GPFCON |= ((2<<0) | (2<<4)); /* S2,S3被配置为中断引脚 */
通过电路图得知 S4 S5按键为EINT11号中断引脚和EINT19号中断引脚
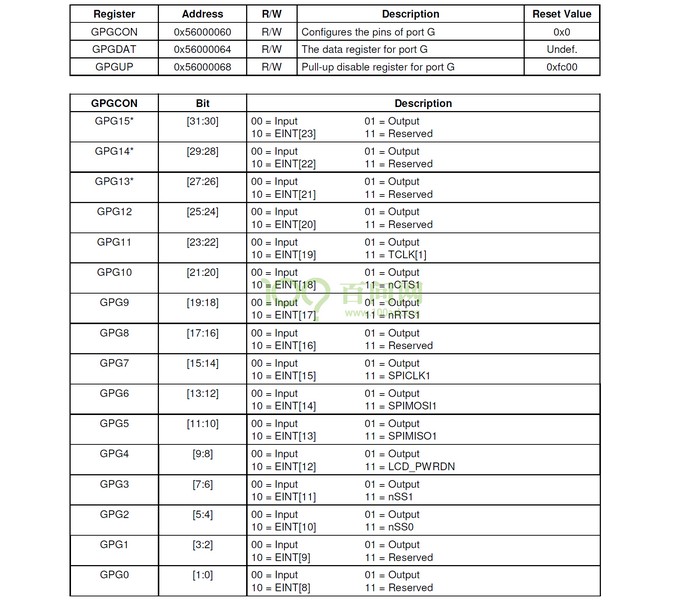
GPGCON &= ~((3<<6) | (3<<11));
GPGCON |= ((2<<6) | (2<<11)); /* S4,S5被配置为中断引脚 */
2 设置中断触发方式: (按下松开,从低电源变为高电源,或者从)双边沿触发
设置<code>EINT0 EINT2</code>为双边沿触发
EXTINT0 |= (7<<0) | (7<<8); /* S2,S3 */
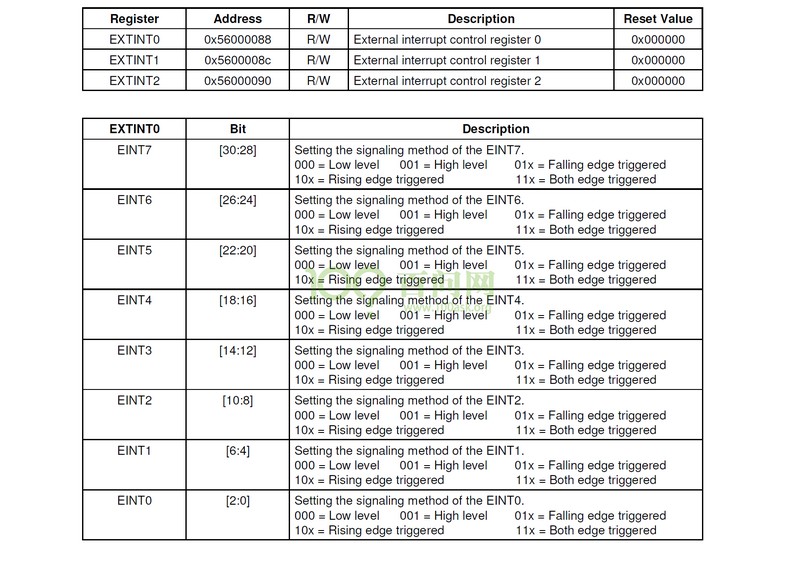
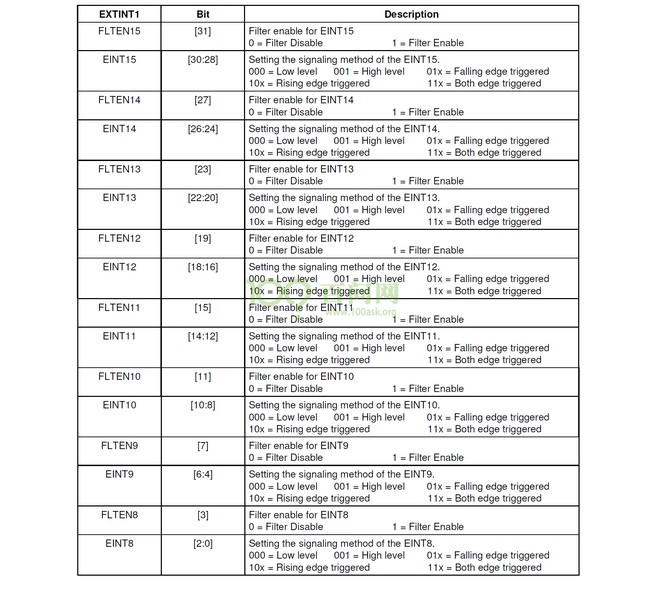
设置EINT11为双边沿触发
EXTINT1 |= (7<<12); /* S4 */
设置EINT19为双边沿触发

EXTINT2 |= (7<<12); /* S5 */
外部中断屏蔽寄存器EINTMASK,设置为1的话就禁止向外部发出中断信号,只有EINTMASK相应的位设置为0外部中断才能给中断控制器发信号
我们需要设置这个寄存器
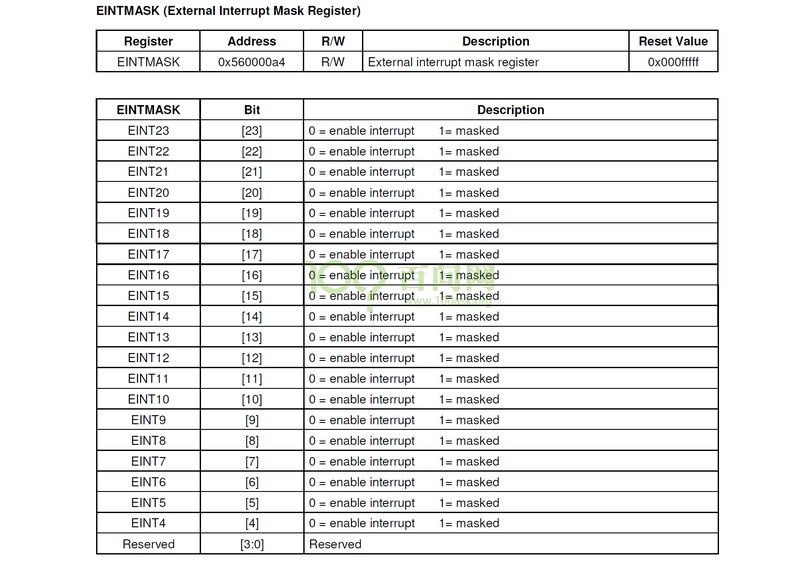
把EINT11设置为0 把EINT19设置为0对于EINT0 和EINT2显示为保留,默认时使能的,可以直接发送给中断控制器,无需设置
设置EINTMASK使能eint11,19
EINTMASK &= ~((1<<11) | (1<<19));
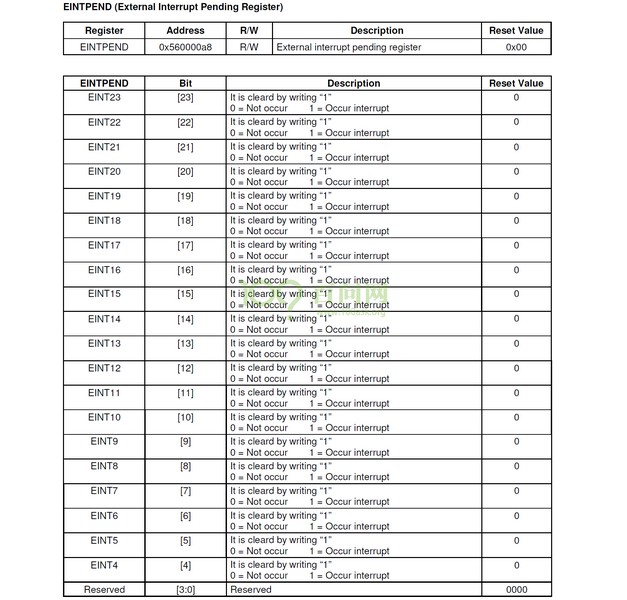
读EINTPEND分辨率哪个EINT产生(eint4~23)(并且要清除它)
清除中断时, 写EINTPEND的相应位
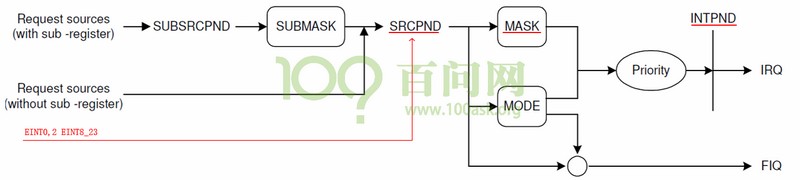
我们接下来需要阅读'第14章 Interrupt Controller章节设置中断控制器我们只需要按照下面这张流程图设置就可以了
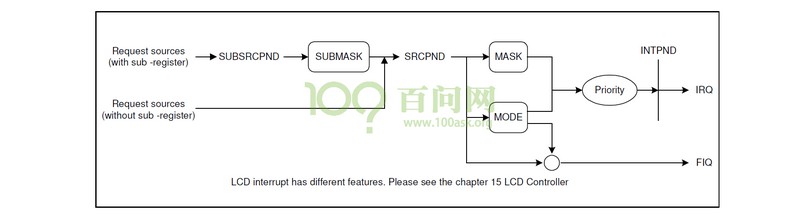
我们需要设置
MASK 屏蔽寄存器
INTPND 等待处理,我们可以读这个寄存器,确定是那个中断产生了
SRCPND不同的中断类型不可以直接到达这里执行
我们来看一下外部中断属于哪一种
打开芯片手册,从上往下读
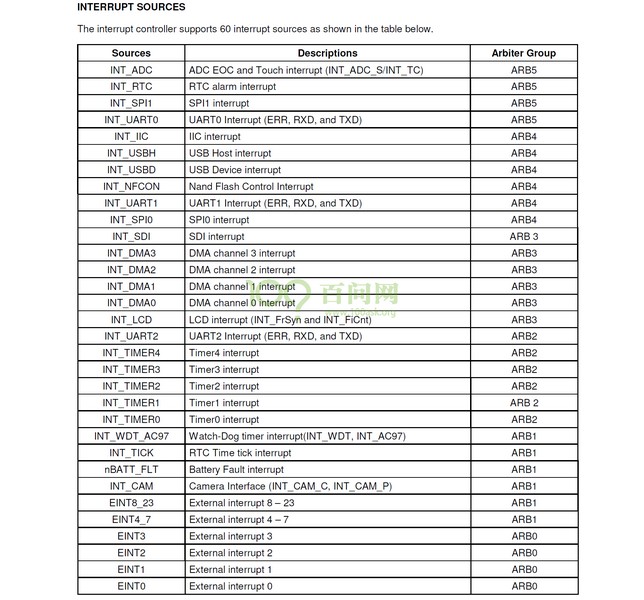
由上图可得 EINT4_7 EINT8_23合用一条中断线ARB1
也就是可以直接到达SRCPND不需要设置SUBSRCPND和SUBMASK这两个寄存器
我们使用的外部中断源只需要设置SRCPND MASK INTPND这三个就可以
/* SRCPND 用来显示哪个中断产生了, 需要清除对应位,我们只需要关心
* bit0对应eint0
* bit2对应eint2
* bit5对应eint8_23(表明bit5等于1的时候 eint8_23中的某一个已经产生,我们需要继续分辨
* 读EINTPEND分辨率哪个EINT产生)
*/
INTMOD寄存器 默认值为IRQ模式即可,不需要设置

INTMASK寄存器,需要设置为0

/* INTMSK 用来屏蔽中断, 1对应masked屏蔽中断,我们需要设置相应位设置为0
* bit0-eint0
* bit2-eint2
* bit5-eint8_23
*/
同时可能有多个中断产生,这么多个中断经过优先级以后,只会有一个通知CPU,是哪一个中断优先级最高,可以读INTPAD就能知道当前处理的唯 一 一个中断是那一个

1 表示这个中断已经产生,需要配置相应的位
INTPND 用来显示当前优先级最高的、正在发生的中断, 需要清除对应位
bit0-eint0
bit2-eint2
bit5-eint8_23
INTOFFSET是用来显示INTPND寄存器中哪一位正在等待处理
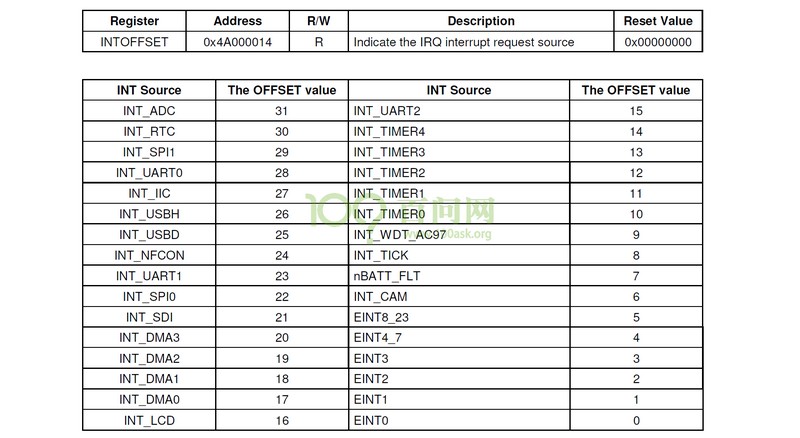
INTPAD中bit0等于1的话INTOFFSET就等于0
INTPAD中bit1等于1的话INTOFFSET值就等于1
INTOFFSET : 用来显示INTPND中哪一位被设置为1
SRCPND我们用不到
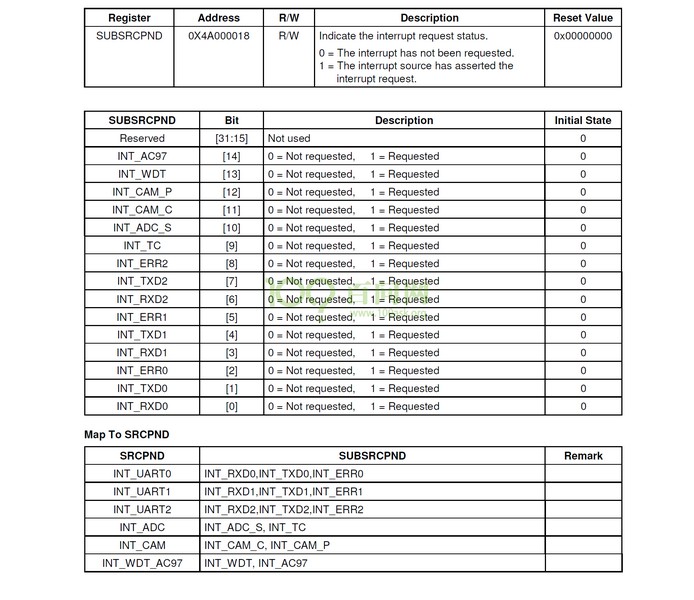
某一位等于1时INT_UART0它的来源可能有多个,这是串口0的中断,串口0的中断产生时有可能是接收到了数据(INT_RXD0),有可能是发送了数据(INT_TXD0),也有可能是产生了错误,那么到底是哪一个呢?
需要去读取SUBSRCPND下一级的源寄存器
我们只需要设置INTMSK这个寄存器
SRCPND和INTPND只有发生中断才需要设置
/* 初始化中断控制器 */
void interrupt_init(void)
{
//1是屏蔽我们需要清零,外部中断0 外部中断2 外部中8_23里面还有外部中断11到19
INTMSK &= ~((1<<0) | (1<<2) | (1<<5));
}
修改start.S删除
bl interrupt_init /* 初始化中断控制器 /
bl key_eint_init / 初始化按键, 设为中断源 */
能使用c语言就使用C语言,在main.c文件中添加调用C函数:
int main(void)
{
/************1/
interrupt_init(); /* 初始化中断控制器 */
key_eint_init(); /* 初始化按键, 设为中断源 */
*******/
puts("\n\rg_A = ");
printHex(g_A);
puts("\n\r");
第007节_按键中断程序示例_完善#
首先main.c中
我们初始化中断控制器
初始化中断源
假设按键按键就会产生中断,CPU就会跳到start.S 执行
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
ldr pc, swi_addr /* vector 8 : swi */
具体跳到哪里执行,我们需要看看中断向量表在哪里
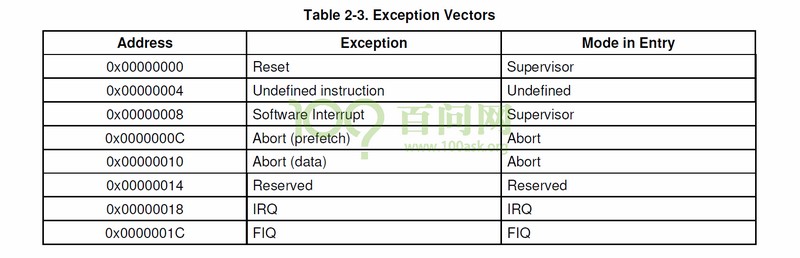
IRQ模式的话跳到0x00000018地方
b halt /* vector 0x0c : prefetch aboot */
b halt /* vector 0x10 : data abort */
b halt /* vector 0x14 : reserved */
ldr pc, irq_addr /* vector 0x18 : irq */
b halt /* vector 0x1c : fiq */
/*3/
do_irq:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序
*/
/* sp_irq未设置, 先设置它 */
/* 4 分配不冲突的没有使用的内存就可以了*/
ldr sp, =0x33d00000
/*5*/
/* 保存现场 */
/*7
发生中断时irq返回值是R14 -4 为什么要减去4,硬件结构让你怎么做就怎么做
*/
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, {r0-r12, lr}
/* 处理irq异常 */
/*6
在这C函数里分辨中断源,处理中断
*/
bl handle_irq_c
/*8*/
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr_irq的值恢复到cpsr里 */
</syntaxhighlight >
接下来我们在interrupt.c中写出 handle_irq_c处理函数
这个是处理中断的C函数
```c
void handle_irq_c(void)
{
/*1 分辨中断源 */
/*读INTOFFSET在芯片手册里找到这个寄存器,它里面的值表示INTPND中哪一位被设置成1*/
int bit = INTOFFSET;
/*2 调用对应的处理函数 */
if (bit == 0 || bit == 2 || bit == 5) /* 对应eint0,2,eint8_23 */
{
/*我们会调用一个按键处理函数*/
key_eint_irq(bit); /* 处理中断, 清中断源EINTPEND */
}
/*3 清中断 : 从源头开始清
*先清除掉中断源里面的某些寄存器
*再清 SRCPND
*再清 INTPND
*/
SRCPND = (1<<bit);
INTPND = (1<<bit);
}
读EINTPEND分辨率哪个EINT产生(eint4~23)清除中断时, 写EINTPEND的相应位
void key_eint_irq(int irq)
{
/**4清的时候我先把这个值读出来,清的时候我再把他写进去/
unsigned int val = EINTPEND;
unsigned int val1 = GPFDAT;
unsigned int val2 = GPGDAT;
if (irq == 0) /*1 外部中断eint0对应s2按键 */
{
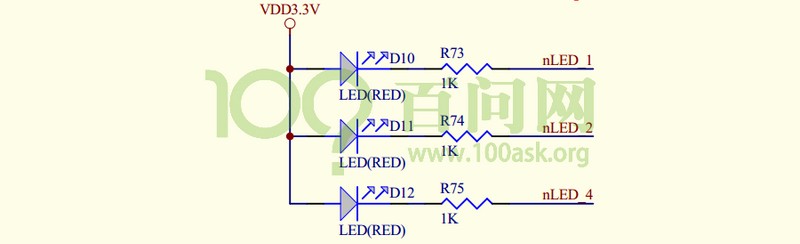
我们使用s2来控制那盏灯?
*之前我们写过按键控制led灯的程序,它使用的是s2控制gpf6
*也就是s2控制led4 D12
*/
/****1.2如何知道是按下还是松开,我们需要读值*/
if (val1 & (1<<0)) /* s2 --> gpf6 */
{
/*1.3 松开 */
GPFDAT |= (1<<6);
}
else
{
/*1.4 按下 */
GPFDAT &= ~(1<<6);
}
}
else if (irq == 2) /*2 eint2对应s3 控制 D11 LED2 */
{
if (val1 & (1<<2)) /* s3 --> gpf5 */
{
/* 松开 */
GPFDAT |= (1<<5);
}
else
{
/* 按下 */
GPFDAT &= ~(1<<5);
}
}
else if (irq == 5) /*3 eint8_23, eint11对应s4 控制 D10 LED1, eint19对应s5 控制所有LED */
{
到底是发生哪一种中断,我们需要读取 EINTPND来判断是那个中断产生

如果bit19等于1的话表明外部中断EINT19产生了,如果bit11等于1表用外部中断11产生,这里我们需要判断
if (val & (1<<11)) /* 表明外部中断eint11产生 */
{
if (val2 & (1<<3)) /* s4 --> gpf4 */
{
/* 松开 */
GPFDAT |= (1<<4);
}
else
{
/* 按下 */
GPFDAT &= ~(1<<4);
}
}
else if (val & (1<<19)) /* 表用外部中断eint19 */
{
if (val2 & (1<<11))
{
/* 松开 */
/* 熄灭所有LED 输出高电平 */
GPFDAT |= ((1<<4) | (1<<5) | (1<<6));
}
else
{
/* 按下: 点亮所有LED */
GPFDAT &= ~((1<<4) | (1<<5) | (1<<6));
}
}
}
/**5 再把值写进去就达到了清除的效果*/
EINTPEND = val;
}
上传代码测试
我们需要包含头文件
include "S3c2440_soc.h"
编译通过,开发板上电测试发现按键s5无法控制
查看 interrupt.c文件中的按键初始化
/* 初始化按键, 设为中断源 */
void key_eint_init(void)
{
/* 配置GPIO为中断引脚 */
GPFCON &= ~((3<<0) | (3<<4));
GPFCON |= ((2<<0) | (2<<4)); /* S2,S3被配置为中断引脚 */
/*发现外部中断19的bit位配置不正确应该是22*/
GPGCON &= ~((3<<6) | (3<<22));
GPGCON |= ((2<<6) | (2<<22)); /* S4,S5被配置为中断引脚 */
上传代码从新编译执行
重新烧写看是否可以使用
回顾中断处理流程
我们start.s
一上电从
_start:
运行
做一些初始化工作
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
/* 复位之后, cpu处于svc模式
* 现在, 切换到usr模式
*/
mrs r0, cpsr /* 读出cpsr */
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
bic r0, r0, #(1<<7) /* 清除I位, 使能中断 */
msr cpsr, r0
/* 设置 sp_usr */
ldr sp, =0x33f00000
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
//让后设置CPSR开中断
//让后调到mian函数,做一些中断初始化
int main(void)
{
led_init();
interrupt_init(); /* 初始化中断控制器 */
key_eint_init(); /* 初始化按键, 设为中断源 */
puts("\n\rg_A = ");
printHex(g_A);
puts("\n\r");
/*让后在main函数里一直循环输出串口*/
while (1)
{
putchar(g_Char);
g_Char++;
putchar(g_Char3);
g_Char3++;
delay(1000000);
}
//这个时候按下按键就会产生中断,让后进入start.s
//跳到0x18 irq模式
ldr pc, irq_addr /* vector 0x18 : irq */
它是一条读内存的执行,从这里读地址赋给pc
irq_addr:
.word do_irq
就跳到sdram执行do_irq函数
do_irq:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序
*/
/* sp_irq未设置, 先设置它 */
ldr sp, =0x33d00000
/* 保存现场 */
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, {r0-r12, lr}
/* 处理irq异常 */
bl handle_irq_c
/* 恢复现场 */
它怎么处理
/* 读EINTPEND分辨率哪个EINT产生(eint4~23)
* 清除中断时, 写EINTPEND的相应位
*/
void key_eint_irq(int irq)
{
unsigned int val = EINTPEND;
unsigned int val1 = GPFDAT;
unsigned int val2 = GPGDAT;
if (irq == 0) /* eint0 : s2 控制 D12 */
{
if (val1 & (1<<0)) /* s2 --> gpf6 */
{
/* 松开 */
GPFDAT |= (1<<6);
}
else
{
/* 按下 */
GPFDAT &= ~(1<<6);
}
}
else if (irq == 2) /* eint2 : s3 控制 D11 */
{
if (val1 & (1<<2)) /* s3 --> gpf5 */
{
/* 松开 */
GPFDAT |= (1<<5);
}
else
{
/* 按下 */
GPFDAT &= ~(1<<5);
}
}
else if (irq == 5) /* eint8_23, eint11--s4 控制 D10, eint19---s5 控制所有LED */
{
if (val & (1<<11)) /* eint11 */
{
if (val2 & (1<<3)) /* s4 --> gpf4 */
{
/* 松开 */
GPFDAT |= (1<<4);
}
else
{
/* 按下 */
GPFDAT &= ~(1<<4);
}
}
else if (val & (1<<19)) /* eint19 */
{
if (val2 & (1<<11))
{
/* 松开 */
/* 熄灭所有LED */
GPFDAT |= ((1<<4) | (1<<5) | (1<<6));
}
else
{
/* 按下: 点亮所有LED */
GPFDAT &= ~((1<<4) | (1<<5) | (1<<6));
}
}
}
EINTPEND = val;
}
处理完之后清中断,从源头开始清
这完全是按照中断流程操作的
第008节_定时器中断程序示例#
这节课我们来写一个定时器的中断服务程序
使用定时器来实现点灯计数
查考资料就是第10章PWM TIMER
可以参考书籍《嵌入式Linux应用程序开发完全手册》第10章
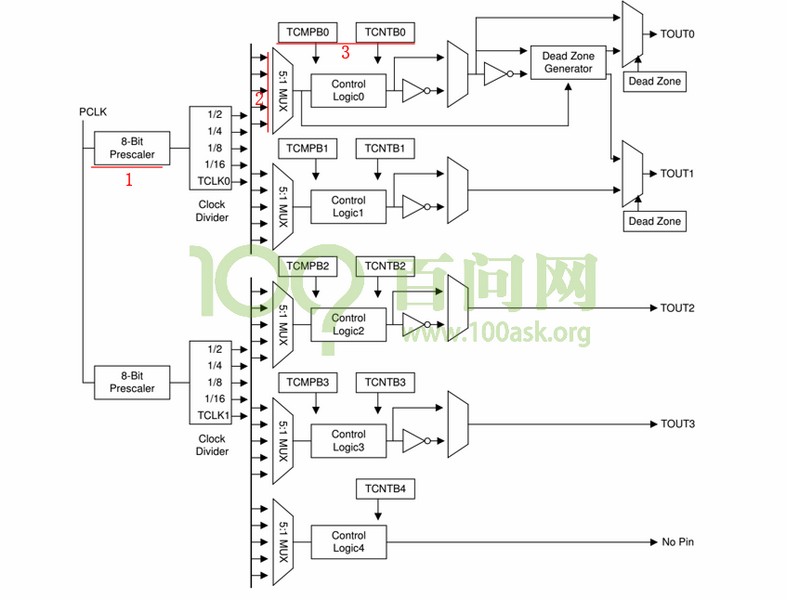
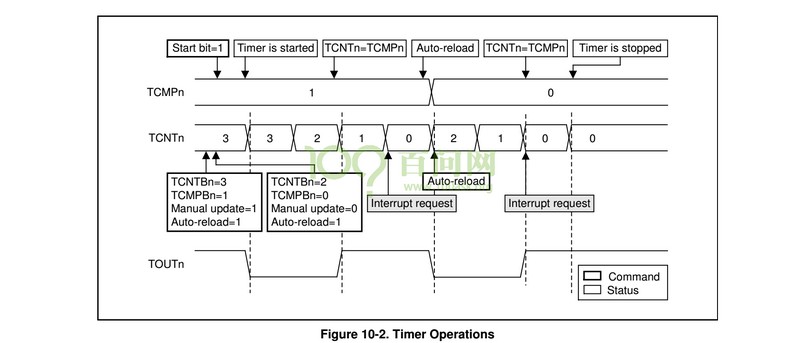
我们先把这个结构图展示出来

这个图的结构很好
这里面肯定有一个clk(时钟),
1 每来一个clk(时钟)这个TCNTn减去1
2 当TCNTn == TCMPn时,可以产生中断,也可以让对应的SPWM引脚反转,(比如说原来是高电平,发生之后电平转换成低电平)
3 TCNTn继续减1,当TCNTn == 0时,可以产生中断,pwm引脚再次反转
TCMPn 和 TCNTn的初始值来自 TCMPBn,TCNTBn
4 TCNTn == 0时,可自动加载初始
怎么使用定时器?
1 设置时钟
2 设置初值
3 加载初始,启动Timer
4 设置为自动加载
5 中断相关
由于2440没有引出pwm引脚,所以pwm功能无法使用,也就无法做pwm相关实验,所谓pwm是指可调制脉冲

T1高脉冲和T2低脉冲它的时间T1, T2可调整,可以输出不同频率不同占控比的波形,在控制电机时特别有用
我们这个程序只做一个实验,当TCNTn这个计数器到0的时候,就产生中断,在这个中断服务程序里我们点灯
写代码
打开我们的main函数
int main(void)
{
led_init();
interrupt_init(); /* 初始化中断控制器 */
//我们初始化了中断源,同样的,我们初始化timer
key_eint_init(); /* 初始化按键, 设为中断源 */
//初始化定时器
timer_init();
我们需要实现定时器初始化函数
新建一个 timer.c,我们肯定需要操作一堆寄存器,添加头文件
#include "s3c2440_soc.h"
void timer_init(void)
- 设置TIMER0的时钟
- 设置TIMER0的初值
- 加载初值, 启动timer0
- 设置为自动加载并启动(值到0以后会自动加载)
- 设置中断,显然我们需要提供一个中断处理函数
void timer_irq(void)在这里面我们需要点灯
打开芯片手册,我们想设置timer0的话
- 首先设置8-Bit Prescaler
- 设置5.1 MUX(选择一个时钟分频)
- 设置TCMPB0和TCNTB0
- 设置TCONn寄存器
看手册上写如何初始化timer
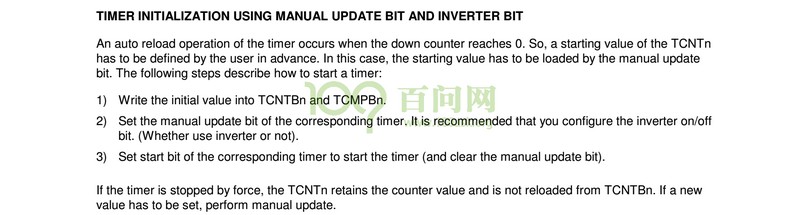
- 把初始值写到TCNTBn 和TCMPBn寄存器
- 设置手动更新位
- 设置启动位
往下看到时钟配置寄存器
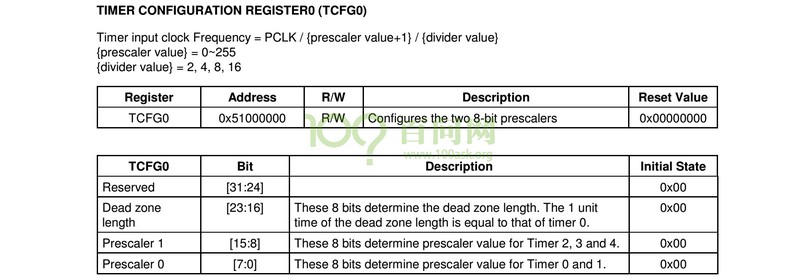
有个计算公式
Timer clk = PCLK / {(预分频数)prescaler value+1} / {divider value(5.1MUX值)}
PCLK是50M
= 50000000/(99+1)/16
= 31250
也就是说我们得TCON是31250的话,从这个值一直减到0
Prescaler0等于99
TCFG0 = 99; /* Prescaler 0 = 99, 用于timer0,1 */
TCFG1 MUX多路复用器的意思,他有多路输入,我们可以通过MUX选择其中一路作为输出
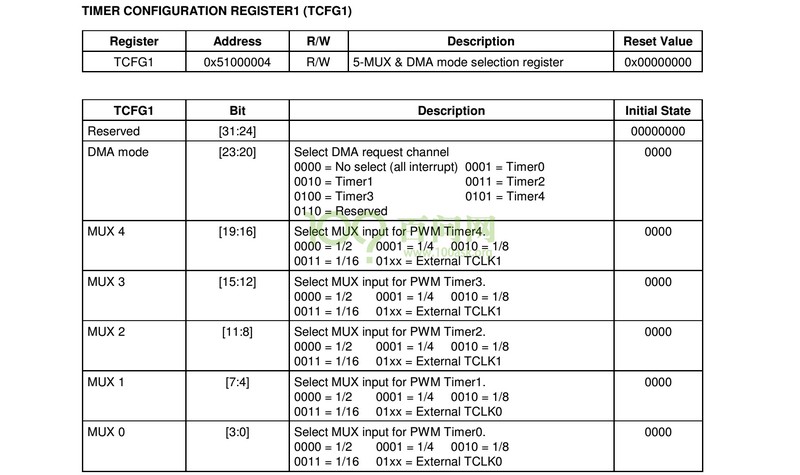
根据上面mux的值,我们要把MUX0 设置成0011
只需要设置这4位即可,先清零
再或上 0011 就是3
TCFG1 &= ~0xf;
TCFG1 |= 3; /* MUX0 : 1/16 */
再来看看初始值控制寄存器

一秒钟点灯太慢了 ,就让0.5秒
TCNTB0 = 15625; /* 0.5s中断一次 */
这个寄存器是用来观察里面的计数值的,不需要设置
现在可以设置TCON来设置这个寄存器了
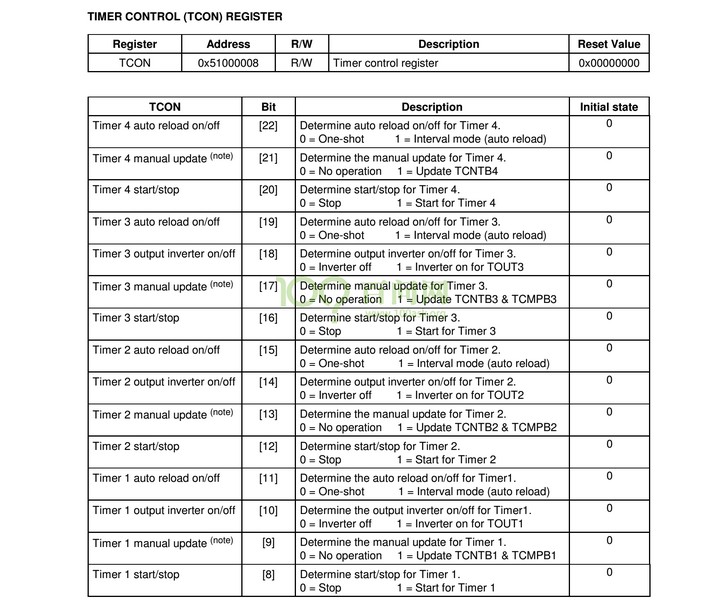
现在需要设置Timer0
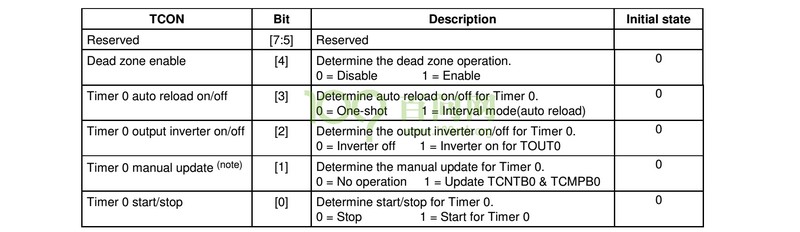
开始需要手工更新
TCON |= (1<<1); /* Update from TCNTB0 & TCMPB0 */
把这两个值放到TCNTB0 和 TCMPB0中
注意:这一位必须清楚才能写下一位
设置为自动加载并启动,先清掉手动更新位,再或上bit0 bit3
TCON &= (1<<1);
TCON |= (1<<0) | (1<<3); /* bit0: start, bit3: auto reload */
设置中断,显然我们需要提供一个中断处理函数void timer_irq(void)
在Timer里没有看到中断相关的控制器,我们需要回到中断章节去看看中断控制器,看看有没有定时器相关的中断
我们没有看到更加细致的Timer0寄存器
当TCNTn=TCMPn时,他不会产生中断,只有当TCNTn等于0的时候才可以产生中断,我们之前以为这个定时器可以产生两种中断,那么肯定有寄存器中断或者禁止两种寄存器其中之一,那现在只有一种中断的话,就相对简单些
设置中断的话,我们只需要设置中断控制器
设置interrupu.c中断控制器
*初始化中断控制器 void interrupt_init(void)
INTMSK &= ~((1<<0) | (1<<2) | (1<<5));
*把定时器相应的位清零就可以了,哪一位呢?
INTPND的哪一位?
INT_TIMER0第10位即可
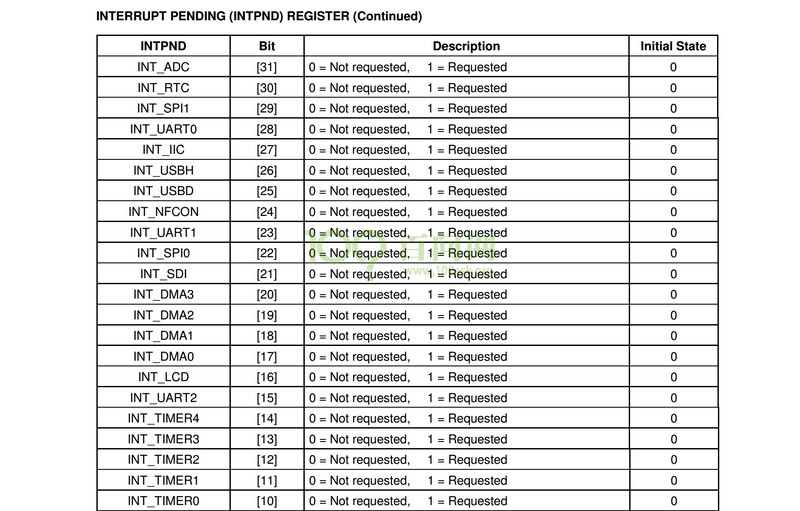
INTMSK &= ~(1<<10); /* enable timer0 int */
当定时器减到0的时候就会产生中断,就会进到start.s这里一路执行do_irq
do_irq:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序
*/
/* sp_irq未设置, 先设置它 */
ldr sp, =0x33d00000
/* 保存现场 */
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, {r0-r12, lr}
/* 处理irq异常 */
bl handle_irq_c
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr_irq的值恢复到cpsr里 */
让后进入irq处理函数中处理,处理这个irq
void handle_irq_c(void)
{
/* 分辨中断源 */
int bit = INTOFFSET;
/* 调用对应的处理函数 */
if(bit ==0 || bit == 2 || bit == 5)/*eint0,2,rint8_23*/
{
key_eint_irq(bit);/*处理中断,清中断源EINTPEND*/
}else if(bit == 10)//如果等于10的话说明发生的是定时器中断,这时候就调用我们得timer_irq
{
timer_irq();
}
/* 清中断 : 从源头开始清 */
SRCPND = (1<<bit);
INTPND = (1<<bit);
}
回到timer.c文件中,在这个定时器处理函数中我们需要点灯
void timer_irq(void)
{
/* 点灯计数 循环点灯*/
static int cnt = 0;
int tmp;
cnt++;
tmp = ~cnt;
tmp &= 7;
GPFDAT &= ~(7<<4);
GPFDAT |= (tmp<<4);
}
代码写完我们实验一下,上传代码,在Makefile中添加timer.o,进行编译
编译后进行烧写
现象灯没有闪烁
他不是有一个观察寄存器么?
我们不断的打印这个值,看是否有变化

在main函数中不断打印
putchar(g_Char3);
g_Char3++;
delay(1000000);
printHex(TCNTO0);
编译实验
打印结果全都是0,发现我们的定时器根本就没有启用,在timer.c文件void timer_init(void)函数里设置为自动加载并启动,先清掉手动更新位,再或上bit0 bit3
TCON &= ~(1<<1);//我们没有设置取反
TCON |= (1<<0) | (1<<3); /* bit0: start, bit3: auto reload */
再次实验
发现灯已经开始闪,就可以把调试信息去除了
对程序进行改进
进入main函数中执行 timer_init();
还需要修改interrupt.c
初始化函数
void interrupt_init(void)
还需要调用中断处理函数
void handle_irq_c(void)
每次添加一个中断我都需要修改handle_irq这个函数,这样太麻烦,我能不能保证这个interrupt文件不变,只需要在timer.c中引用即可,这里我们使用指针数组
在interrupt.c中定义函数指针数组
typedef void(*irq_func)(int);
定义一个数组,我们来卡看下这里有多少项,一共32位,我们想把每一个中断的处理函数都放在这个数组里面来,当发生中断时,我们可以得到这个中断号,让后我从数组里面调用对应的中断号就可以了
irq_func irq_array[32];
那么我们得提供一个注册函数
void register_irq (int irq, irq_func fp)
{
irq_array[irq] = fp;
INTMASK &= ~(1 << irq)
}
以后我直接调用对应的处理函数
void handle_irq_c(void)
{
/* 分辨中断源 */
int bit = INTOFFSET;
/* 调用对应的处理函数 */
irq_array[bit](bit);
/* 清中断 : 从源头开始清 */
SRCPND = (1<<bit);
INTPND = (1<<bit);
}
//按键中断初始化函数需要注册
/* 初始化按键, 设为中断源 */
void key_eint_init(void)
{
/* 配置GPIO为中断引脚 */
GPFCON &= ~((3<<0) | (3<<4));
GPFCON |= ((2<<0) | (2<<4)); /* S2,S3被配置为中断引脚 */
GPGCON &= ~((3<<6) | (3<<22));
GPGCON |= ((2<<6) | (2<<22)); /* S4,S5被配置为中断引脚 */
/* 设置中断触发方式: 双边沿触发 */
EXTINT0 |= (7<<0) | (7<<8); /* S2,S3 */
EXTINT1 |= (7<<12); /* S4 */
EXTINT2 |= (7<<12); /* S5 */
/* 设置EINTMASK使能eint11,19 */
EINTMASK &= ~((1<<11) | (1<<19));
register_irq(0, key_eint_irq);
register_irq(2, key_eint_irq);
register_irq(5, key_eint_irq);
}
在timer.c中也需要设置中断
void timer_init(void)
{
/* 设置TIMER0的时钟 */
/* Timer clk = PCLK / {prescaler value+1} / {divider value}
= 50000000/(99+1)/16
= 31250
*/
TCFG0 = 99; /* Prescaler 0 = 99, 用于timer0,1 */
TCFG1 &= ~0xf;
TCFG1 |= 3; /* MUX0 : 1/16 */
/* 设置TIMER0的初值 */
TCNTB0 = 15625; /* 0.5s中断一次 */
/* 加载初值, 启动timer0 */
TCON |= (1<<1); /* Update from TCNTB0 & TCMPB0 */
/* 设置为自动加载并启动 */
TCON &= ~(1<<1);
TCON |= (1<<0) | (1<<3); /* bit0: start, bit3: auto reload */
/* 设置中断 */
register_irq(10, timer_irq);
}
把interrupt.c中按键的初始化放在最后面
我们来看看我们做了什么事情,
<1>我们定义了一个指针数组
typedef void(*irq_func)(int);
这个指针数组里面放有各个指针的处理函数
irq_func irq_array[32];
当我们去初始化按键中断时,我们给这按键注册中断函数
register_irq(0, key_eint_irq);
register_irq(2, key_eint_irq);
register_irq(5, key_eint_irq);
这个注册函数会做什么事情,他会把这个数组放在注册函数里面,同时使能中断
void register_irq(int irq, irq_func fp)
{
irq_array[irq] = fp;
INTMSK &= ~(1<<irq);
}
//我们的timer.c中
timer_init();
//也会注册这个函数
/* 设置中断 */
register_irq(10, timer_irq);
把这个中断irq放在第10项里同时使能中断,以后我们只需要添加中断号,和处理函数即可,再也不需要修改函数
烧写执行
我们从start.s开始看,
一上电从 b reset运行做一列初始化
.text
.global _start
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
ldr pc, swi_addr /* vector 8 : swi */
b halt /* vector 0x0c : prefetch aboot */
b halt /* vector 0x10 : data abort */
b halt /* vector 0x14 : reserved */
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
/* 复位之后, cpu处于svc模式
* 现在, 切换到usr模式
*/
mrs r0, cpsr /* 读出cpsr */
bic r0, r0, #0xf /* 修改M4-M0为0b10000, 进入usr模式 */
bic r0, r0, #(1<<7) /* 清除I位, 使能中断 */
msr cpsr, r0
/* 设置 sp_usr */
ldr sp, =0x33f00000
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
swi 0x123 /* 执行此命令, 触发SWI异常, 进入0x8执行 */
/***最后执行main函数***/
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
进入main.c做一系列初始化
int main(void)
{
led_init();
//interrupt_init(); /* 初始化中断控制器 */
key_eint_init(); /* 初始化按键, 设为中断源 */
timer_init();
puts("\n\rg_A = ");
printHex(g_A);
puts("\n\r");
进入按键初始化程序 interrupt.c
初始化按键, 设为中断源
void key_eint_init(void)
{
/* 配置GPIO为中断引脚 */
GPFCON &= ~((3<<0) | (3<<4));
GPFCON |= ((2<<0) | (2<<4)); /* S2,S3被配置为中断引脚 */
GPGCON &= ~((3<<6) | (3<<22));
GPGCON |= ((2<<6) | (2<<22)); /* S4,S5被配置为中断引脚 */
/* 设置中断触发方式: 双边沿触发 */
EXTINT0 |= (7<<0) | (7<<8); /* S2,S3 */
EXTINT1 |= (7<<12); /* S4 */
EXTINT2 |= (7<<12); /* S5 */
/* 设置EINTMASK使能eint11,19 */
EINTMASK &= ~((1<<11) | (1<<19));
/*注册中断控制器*/
register_irq(0, key_eint_irq);
register_irq(2, key_eint_irq);
register_irq(5, key_eint_irq);
}
时钟初始化程序 <code>timer_init();</code>
void timer_init(void)
{
/* 设置TIMER0的时钟 */
/* Timer clk = PCLK / {prescaler value+1} / {divider value}
= 50000000/(99+1)/16
= 31250
*/
TCFG0 = 99; /* Prescaler 0 = 99, 用于timer0,1 */
TCFG1 &= ~0xf;
TCFG1 |= 3; /* MUX0 : 1/16 */
/* 设置TIMER0的初值 */
TCNTB0 = 15625; /* 0.5s中断一次 */
/* 加载初值, 启动timer0 */
TCON |= (1<<1); /* Update from TCNTB0 & TCMPB0 */
/* 设置为自动加载并启动 */
TCON &= ~(1<<1);
TCON |= (1<<0) | (1<<3); /* bit0: start, bit3: auto reload */
/* 设置中断 */
register_irq(10, timer_irq);
}
让后main.c函数一直循环执行
输出串口信息
while (1)
{
putchar(g_Char);
g_Char++;
putchar(g_Char3);
g_Char3++;
delay(1000000);
//printHex(TCNTO0);
}
定时器减到0的时候就会产生中断,start.S
跳到 0x18的地方执行
ldr pc, irq_addr /* vector 0x18 : irq */
b halt /* vector 0x1c : fiq */
.align 4
do_irq:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序
*/
/* sp_irq未设置, 先设置它 */
ldr sp, =0x33d00000
/* 保存现场 */
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, {r0-r12, lr}
/* 处理irq异常 */
bl handle_irq_c
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr_irq的值恢复到cpsr里 */
看看怎么处理irq
void handle_irq_c(void)
{
/* 分辨中断源 */
int bit = INTOFFSET;
/* 调用对应的处理函数执行 */
irq_array[bit](bit);
/* 清中断 : 从源头开始清 */
SRCPND = (1<<bit);
INTPND = (1<<bit);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号