

基于C#的机器学习--旅行推销员问题
我们有一个必须在n个城市之间旅行的推销员。他不在乎什么顺序。他最先或最后访问的城市除外。他唯一关心的是他会去拜访每一个人,每个城市只有一次,最后一站是他得家。
每个城市都是一个节点,每个节点通过一条边与其他封闭节点相连(可以将其想象成公路、飞机、火车、汽车等)
每个连接都有一个或多个权值与之相关,我们称之为成本。
成本描述了沿着该连接旅行的困难程度,如机票成本、汽车所需的汽油量等。
他的首要任务是尽可能降低成本和旅行距离。
对于那些学过或熟悉图论的人,希望你们还记得无向加权图。
城市是顶点,路径是边,路径距离是边的权值。本质上,我们有一个最小化的问题,即在访问了其他每个顶点一次之后,从一个特定的顶点开始和结束。实际上,当我们完成的时候,可能会得到一个完整的图,其中每一对顶点都由一条边连接起来。
接下来,我们必须讨论不对称和对称的问题,因为这个问题最终可能是其中之一。到底是什么意思?我们有一个非对称旅行推销员问题或者一个对称旅行推销员问题。这完全取决于两座城市之间的距离。如果每个方向上的距离相等,我们有一个对称的旅行推销员问题,对称性帮助我们得到可能的解。如果两个方向上的路径不存在,或者距离不同,我们就有一个有向图。下图显示了前面的描述:
旅行推销员问题可以是对称的,也可以是非对称的。让我们从对将要发生的事情从最简描述开始。
在生物界,当我们想要创建一个新的基因型时,我们会从父a那里取一点,从父b那里取一点。这叫做交叉突变。在这之后,这些基因型就会受到轻微的干扰或改变。这被称为突变。这就是遗传物质产生的过程。
接下来,我们删除原始代,代之以新的代,并测试每个基因型。更新的基因型,作为其先前组成部分的更好部分,现在将向更高的适应度倾斜;平均而言,这一代人的得分应该高于上一代人。
这一过程将持续许多代,随着时间的推移,人口的平均适应度将不断进化和提高。在现实生活中,这并不总是有效的,但一般来说,它是有效的。
在后面会有一个遗传算法编程的讲解,以便让我们深入研究我们的应用程序。
下面是我们的示例应用程序。它是基于Accord.NET框架的。在定义了需要访问的房屋数量之后,只需单击生成按钮:
在我们的测试应用程序中,我们可以非常容易地更改我们想要访问的房屋的数量,如高亮显示的区域所示。
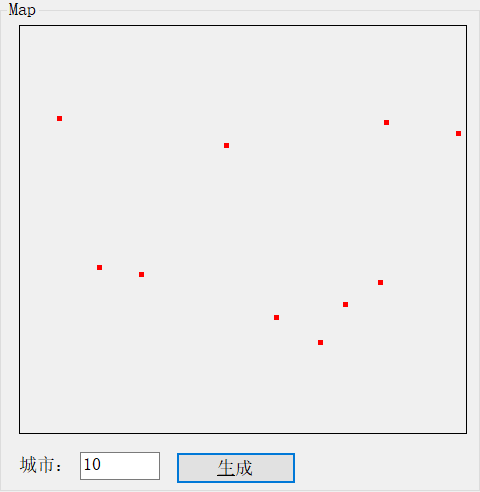
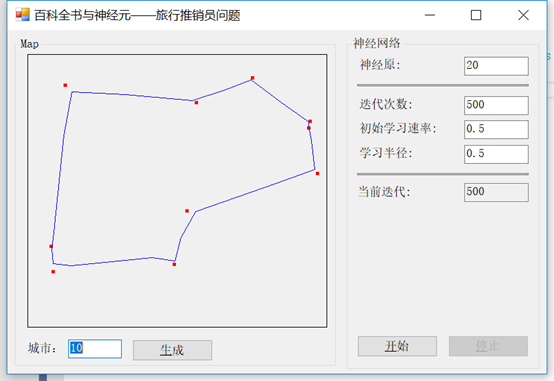
我们可以得到一个非常简单的空间问题或者更复杂的空间问题。这是一个非常简单的空间问题的例子:
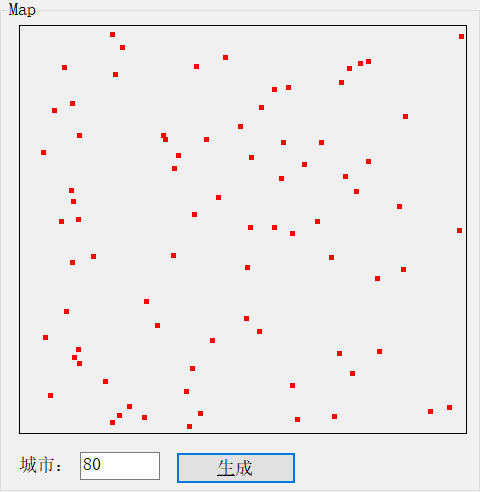
这是一个更复杂的空间问题的例子:
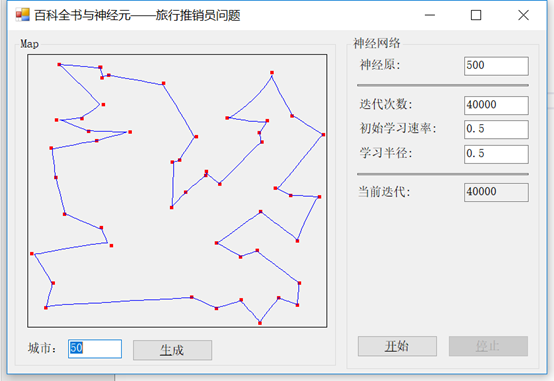
最后,设置我们希望算法使用的迭代总数。点击计算路线按钮,假设一切顺利,我们的地图看起来应该像这样:
让我们看看当我们选择我们想要的城市数量,然后点击生成按钮,会发生什么:
/// <summary> /// 重新生成地图 /// </summary> private void GenerateMap() { Random rand = new Random((int)DateTime.Now.Ticks); // 创建坐标数组 map = new double[citiesCount, 2]; for (int i = 0; i < citiesCount; i++) { map[i, 0] = rand.Next(1001); map[i, 1] = rand.Next(1001); } //设置地图 chart.UpdateDataSeries("cities", map); //删除路径 chart.UpdateDataSeries("path", null); }
我们要做的第一件事就是初始化随机数生成器并对其进行种子化。接下来,我们得到用户指定的城市总数,然后从中创建一个新数组。最后,我们绘制每个点并更新地图。这张地图是来自Accord.NET的图表控件,它将为我们提供大量可视化绘图。完成这些之后,我们就可以计算路径并解决问题了。
接下来,让我们看看我们的主要搜索解决方案是什么样的:
// 创建网络 DistanceNetwork network = new DistanceNetwork(2, neurons); // 设置随机发生器范围 foreach (var neuron in network.Layers.SelectMany(layer => layer?.Neurons).Where(neuron => neuron != null)) { neuron.RandGenerator = new UniformContinuousDistribution(new Range(0, 1000)); } // 创建学习算法 ElasticNetworkLearning trainer = new ElasticNetworkLearning(network); double fixedLearningRate = learningRate / 20; double driftingLearningRate = fixedLearningRate * 19; double[,] path = new double[neurons + 1, 2]; double[] input = new double[2]; int i = 0; while (!needToStop) { // 更新学习速度和半径 trainer.LearningRate = driftingLearningRate * (iterations - i) / iterations + fixedLearningRate; trainer.LearningRadius = learningRadius * (iterations - i) / iterations; // 设置网络输入 int currentCity = rand.Next(citiesCount); input[0] = map[currentCity, 0]; input[1] = map[currentCity, 1]; // 运行一个训练迭代 trainer.Run(input); // 显示当前路径 for (int j = 0; j < neurons; j++) { path[j, 0] = network.Layers[0].Neurons[j].Weights[0]; path[j, 1] = network.Layers[0].Neurons[j].Weights[1]; } path[neurons, 0] = network.Layers[0].Neurons[0].Weights[0]; path[neurons, 1] = network.Layers[0].Neurons[0].Weights[1]; chart.UpdateDataSeries("path", path); i++; SetText(currentIterationBox, i.ToString()); if (i >= iterations) break; }
现在我们已经解决了问题,让我们看看是否可以应用我们在前面关于自组织映射(SOM)一章中学到的知识,从不同的角度来处理这个问题。
我们将使用一种叫做弹性网络训练的技术来解决我们遇到的问题,这是一种很好的无监督的方法。
首先简单介绍一下什么是弹性映射。
弹性映射为创建非线性降维提供了一种工具。它们是数据空间中的弹性弹簧系统,近似于低维流形。利用这种能力,我们可以从完全无结构聚类(无弹性)到更接近线性主成分分析流形(高弯曲/低拉伸)的弹簧。
在使用我们的示例应用程序时,您将看到这些线并不一定像在以前的解决方案中那样僵硬。在许多情况下,它们甚至不可能进入我们所访问的城市的中心(这条线从中心生成),而是只接近城市边界的边缘,如前面的示例所示。
接下来,介绍下神经元。这次我们将有更多的控制,通过指定我们的学习速率和半径。与前面的示例一样,我们将能够指定销售人员今天必须访问的城市总数。
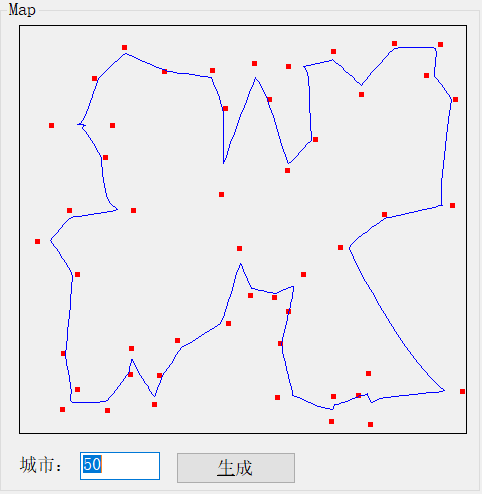
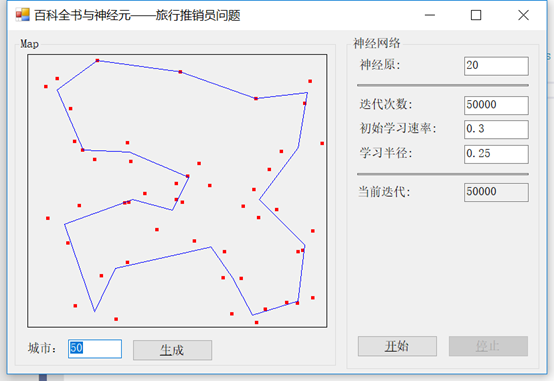
首先,我们将访问50个城市,使用0.3的学习率和0.75的半径。最后,我们将运行50,000次迭代(不用担心,这很快的)。我们的输出是这样的:
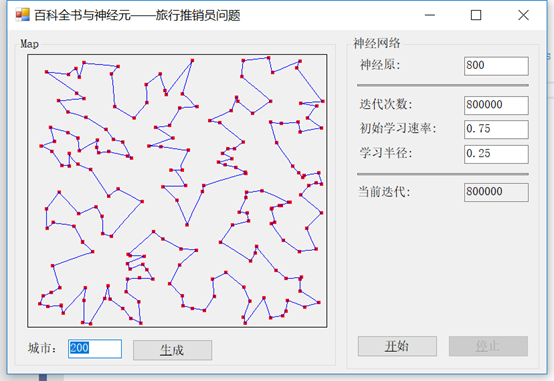
现在,如果我们改变半径为不同的值,比如0.25,会发生什么?注意我们在一些城市之间的角度变得更加明显:
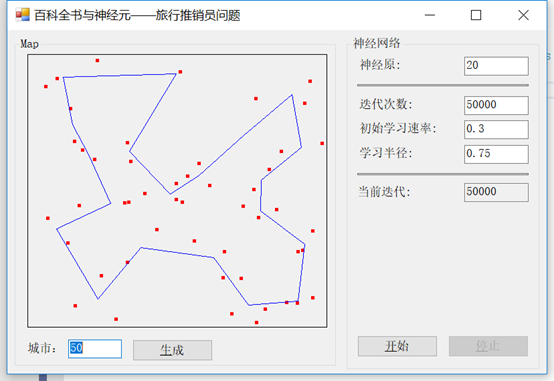
接下来,我们将学习率从0.3改为0.75:
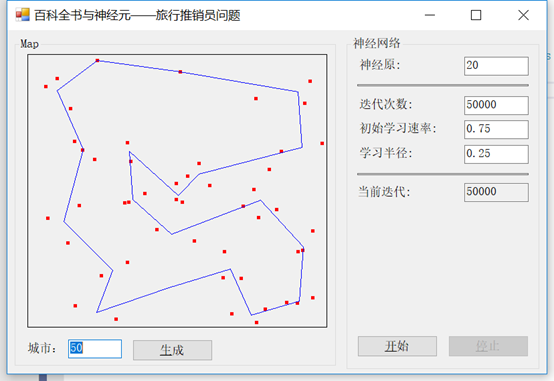
尽管得到路线最终看起来非常相似,但有一个重要的区别。在前面的示例中,直到所有迭代完成,才绘制销售人员的路由路径。
我们所做的第一件事就是创建一个DistanceNetwork对象。这个对象只包含一个DistanceLayer,它是一个距离神经元的单层。距离神经元将其输出计算为其权值与输入值之间的距离,即权值与输入值之间的绝对差值之和。所有这些组成了SOM,更重要的是,我们的弹性网络。
接下来,我们必须用一些随机权值来初始化我们的网络。我们将为每个神经元创建一个均匀连续的分布。均匀连续分布,或称矩形分布,是一种对称的概率分布,对于族中的每一个成员,在分布的支撑点上相同长度的所有区间具有相同的概率。你通常会看到这写成U(a, b)参数a和b分别是最小值和最大值。
// 设置随机发生器范围 foreach (var neuron in network.Layers.SelectMany(layer => layer?.Neurons).Where(neuron => neuron != null)) { neuron.RandGenerator = new UniformContinuousDistribution(new Range(0, 1000)); }
接下来,我们创建弹性学习对象,它允许我们训练我们的距离网络:
// 创建学习算法 ElasticNetworkLearning trainer = new ElasticNetworkLearning(network);
下面是ElasticNetworkLearning构造函数内部的样子:
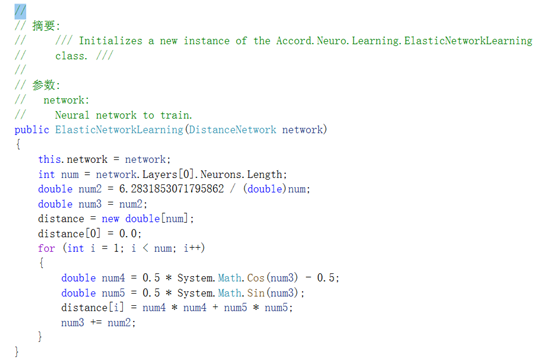
现在我们计算学习速率和半径:
double fixedLearningRate = learningRate / 20; double driftingLearningRate = fixedLearningRate * 19;
最后,进入我们的主循环:
while (!needToStop) { // 更新学习速度和半径 trainer.LearningRate = driftingLearningRate * (iterations - i) / iterations + fixedLearningRate; trainer.LearningRadius = learningRadius * (iterations - i) / iterations; // 设置网络输入 int currentCity = rand.Next(citiesCount); input[0] = map[currentCity, 0]; input[1] = map[currentCity, 1]; // 运行一个训练迭代 trainer.Run(input); // 显示当前路径 for (int j = 0; j < neurons; j++) { path[j, 0] = network.Layers[0].Neurons[j].Weights[0]; path[j, 1] = network.Layers[0].Neurons[j].Weights[1]; } path[neurons, 0] = network.Layers[0].Neurons[0].Weights[0]; path[neurons, 1] = network.Layers[0].Neurons[0].Weights[1]; chart.UpdateDataSeries("path", path); i++; SetText(currentIterationBox, i.ToString()); if (i >= iterations) break; }
在前面的循环中,训练器每次循环增量运行一个epoch(迭代)。这是trainer.Run函数的样子,我们可以看到发生了什么。基本上,该方法找到获胜的神经元(权重值最接近指定输入向量的神经元)。然后更新它的权重以及相邻神经元的权重:
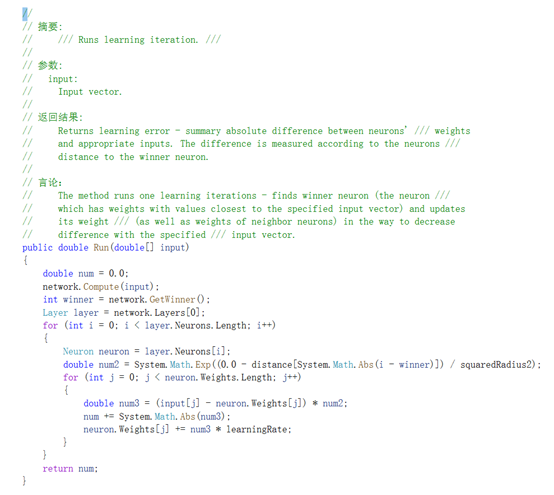
这个方法的两个主要功能是计算网络和获得获胜者(突出显示的项目)。
现在,简要介绍一下我们可以在屏幕上输入的参数。
学习速率
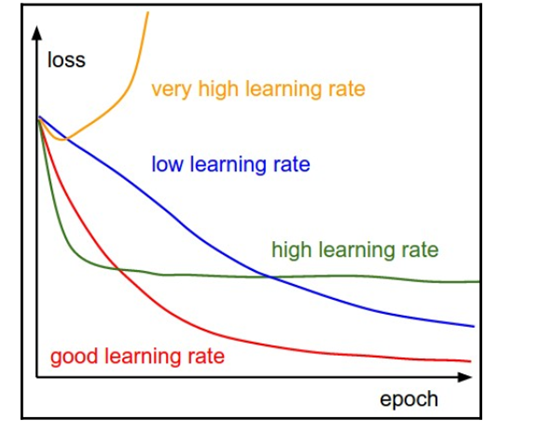
学习速率是决定学习速度的一个参数。更正式地说,它决定了我们根据损失梯度调整网络权重的程度。如果太低,我们沿着斜坡向下的速度就会变慢。即使我们希望有一个较低的学习率,这可能意味着我们将需要很长时间来达到趋同。学习速率也会影响我们的模型收敛到最小值的速度。
在处理神经元时,它决定了有权重用于训练的神经元的获取时间(对新体验做出反应所需的时间)。
学习半径
学习半径决定了获胜神经元周围要更新的神经元数量。在学习过程中,半径圆内的任何神经元都会被更新。神经元越靠近,发生的更新就越多。距离越远,数量越少。
总结
在这一章中,我们学习了神经元,还学习了著名的旅行推销员问题,它是什么,以及我们如何用电脑解决它。这个小例子在现实世界中有着广泛的应用。
在下一章中,我们将回答我们所有开发人员都面临的问题:我应该接受这份工作吗?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号