


深度学习框架PyTorch一书的学习-第六章-实战指南
参考:https://github.com/chenyuntc/pytorch-book/tree/v1.0/chapter6-实战指南
希望大家直接到上面的网址去查看代码,下面是本人的笔记
将上面地址的代码下载到本地后进行操作
1.安装依赖
(deeplearning) userdeMacBook-Pro:dogcat-6 user$ pip install -r requirements.txt ... Successfully built fire ipdb torchnet Installing collected packages: fire, tqdm, ipdb, torchnet Successfully installed fire-0.1.3 ipdb-0.12 torchnet-0.0.4 tqdm-4.31.1
在https://github.com/chenyuntc/pytorch-book/tree/v1.0/chapter6-实战指南处将需要的数据下载下来,并放在./data/train/和./data/test1处
2.训练
必须首先启动visdom:
(deeplearning) userdeMBP:~ user$ python -m visdom.server It's Alive!
然后使用如下命令启动训练:
# 在gpu0上训练,并把可视化结果保存在visdom 的classifier env上
python main.py train --train-data-root=./data/train --use-gpu --env=classifier
详细的使用命令 可使用
python main.py help
3.测试
python main.py test --data-root=./data/test --batch-size=256 --load-path='checkpoints/squeezenet.pth'
4.代码分析
在从事大多数深度学习研究时,程序都需要实现以下几个功能:
- 模型定义
- 数据处理和加载
- 训练模型(Train&Validate)
- 训练过程的可视化
- 测试(Test/Inference)
1)该网络介绍
Dogs vs. Cats是一个传统的二分类问题,其训练集包含25000张图片,均放置在同一文件夹下,命名格式为<category>.<num>.jpg, 如cat.10000.jpg、dog.100.jpg,测试集包含12500张图片,命名为<num>.jpg,如1000.jpg。参赛者需根据训练集的图片训练模型,并在测试集上进行预测,输出它是狗的概率。最后提交的csv文件如下,第一列是图片的<num>,第二列是图片为狗的概率。
id,label 10001,0.889 10002,0.01 ...
2)文件组织架构
前面提到过,程序主要包含以下功能:
- 模型定义
- 数据加载
- 训练和测试
首先来看程序文件的组织结构:
├── checkpoints/ ├── data/ │ ├── __init__.py │ ├── dataset.py │ └── get_data.sh ├── models/ │ ├── __init__.py │ ├── AlexNet.py │ ├── BasicModule.py │ └── ResNet34.py └── utils/ │ ├── __init__.py │ └── visualize.py ├── config.py ├── main.py ├── requirements.txt ├── README.md
其中:
checkpoints/: 用于保存训练好的模型,可使程序在异常退出后仍能重新载入模型,恢复训练data/:数据相关操作,包括数据预处理、dataset实现等models/:模型定义,可以有多个模型,例如上面的AlexNet和ResNet34,一个模型对应一个文件utils/:可能用到的工具函数,在本次实验中主要是封装了可视化工具config.py:配置文件,所有可配置的变量都集中在此,并提供默认值main.py:主文件,训练和测试程序的入口,可通过不同的命令来指定不同的操作和参数requirements.txt:程序依赖的第三方库README.md:提供程序的必要说明
3)__init__.py文件
可以看到,几乎每个文件夹下都有__init__.py,一个目录如果包含了__init__.py 文件,那么它就变成了一个包(package)。
__init__.py可以为空,也可以定义包的属性和方法,但其必须存在,其它程序才能从这个目录中导入相应的模块或函数。例如在data/文件夹下有__init__.py,则在main.py 中就可以from data.dataset import DogCat。而如果在__init__.py中写入from .dataset import DogCat,则在main.py中就可以直接写为:from data import DogCat,或者import data; dataset = data.DogCat,相比于from data.dataset import DogCat更加便捷。
4)数据加载
数据的相关处理主要保存在data/dataset.py中。关于数据加载的相关操作,在上一章中我们已经提到过,其基本原理就是使用Dataset提供数据集的封装,再使用Dataloader实现数据并行加载。Kaggle提供的数据包括训练集和测试集,而我们在实际使用中,还需专门从训练集中取出一部分作为验证集。
对于这三类数据集,其相应操作也不太一样,而如果专门写三个Dataset,则稍显复杂和冗余,因此这里通过加一些判断来区分。对于训练集,我们希望做一些数据增强处理,如随机裁剪、随机翻转、加噪声等,而验证集和测试集则不需要。下面看dataset.py的代码:
# coding:utf8 import os from PIL import Image from torch.utils import data import numpy as np from torchvision import transforms as T class DogCat(data.Dataset): def __init__(self, root, transforms=None, train=True, test=False): """ 主要目标: 获取所有图片的地址,并根据训练,验证,测试划分数据 """ self.test = test imgs = [os.path.join(root, img) for img in os.listdir(root)] # test1: data/test1/8973.jpg # train: data/train/cat.10004.jpg if self.test: # 如果是进行测试,截取得到数据的数字标码,如上面的8973,根据key=8973的值进行排序,返回对所有的图片路径进行排序后返回 imgs = sorted(imgs, key=lambda x: int(x.split('.')[-2].split('/')[-1])) else: #如果是进行训练,截取得到数据的数字标识,如上面的10004,根据key=10004的值进行排序,返回对所有的图片路径进行排序后返回 imgs = sorted(imgs, key=lambda x: int(x.split('.')[-2])) imgs_num = len(imgs) #然后就可以得到数据的大小 if self.test: # 如果是进行测试 self.imgs = imgs elif train: #如果是进行训练,使用前70%的数据 self.imgs = imgs[:int(0.7 * imgs_num)] else: #如果是进行验证,使用后30%的数据 self.imgs = imgs[int(0.7 * imgs_num):] if transforms is None: # 数据转换操作,测试验证和训练的数据转换有所区别 # 对数据进行归一化 normalize = T.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # 当是测试集和验证集时进行的操作 if self.test or not train: self.transforms = T.Compose([ T.Resize(224), #重新设定大小 T.CenterCrop(224), #从图片中心截取 T.ToTensor(), #转成Tensor格式,大小范围为[0,1] normalize #归一化处理,大小范围为[-1,1] ]) else: self.transforms = T.Compose([ T.Resize(256), T.RandomReSizedCrop(224), #从图片的任何部位随机截取224*224大小的图 T.RandomHorizontalFlip(), #随机水平翻转给定的PIL.Image,翻转概率为0.5 T.ToTensor(), normalize ]) def __getitem__(self, index): """ 一次返回一张图片的数据 """ img_path = self.imgs[index] if self.test: #如果是测试,得到图片路径中的数字标识作为label label = int(self.imgs[index].split('.')[-2].split('/')[-1]) else: #如果是训练,判断图片路径中是猫狗来设定label,猫为0,狗为1 label = 1 if 'dog' in img_path.split('/')[-1] else 0 data = Image.open(img_path) #打开该路径获得数据 data = self.transforms(data) #然后对图片数据进行transform return data, label #最后得到统一的图片信息和label信息 def __len__(self): #图片数据的大小 return len(self.imgs)
关于数据集使用的注意事项,在上一章中已经提到,将文件读取等费时操作放在__getitem__函数中,利用多进程加速。避免一次性将所有图片都读进内存,不仅费时也会占用较大内存,而且不易进行数据增强等操作。
另外在这里,我们将训练集中的30%作为验证集,可用来检查模型的训练效果,避免过拟合。
在使用时,我们可通过dataloader加载数据。
#进行训练,定义训练数据和label集合train_dataset train_dataset = DogCat(opt.train_data_root, train=True) #开始进行数据的加载,将数据打乱(shuffle = True), #随机将数据分批,一批有opt.batch_size个,并行处理,打开opt.num_workers个进程 trainloader = DataLoader(train_dataset, batch_size = opt.batch_size, shuffle = True, num_workers = opt.num_workers) #显示得到的数据 for ii, (data, label) in enumerate(trainloader): train() #然后进行训练
5)模型定义
模型的定义主要保存在models/目录下,其中BasicModule是对nn.Module的简易封装,提供快速加载和保存模型的接口
#coding:utf8 import torch as t import time class BasicModule(t.nn.Module): """ 封装了nn.Module,主要是提供了save和load两个方法 """ def __init__(self): super(BasicModule,self).__init__() self.model_name=str(type(self))# 默认名字 def load(self, path): """ 可加载指定路径的模型 """ self.load_state_dict(t.load(path)) def save(self, name=None): """ 保存模型,默认使用“模型名字+时间”作为文件名 """ if name is None: #存储到文件夹checkpoints下面 prefix = 'checkpoints/' + self.model_name + '_' name = time.strftime(prefix + '%m%d_%H:%M:%S.pth') t.save(self.state_dict(), name) return name def get_optimizer(self, lr, weight_decay): #优化器 return t.optim.Adam(self.parameters(), lr=lr, weight_decay=weight_decay) class Flat(t.nn.Module): """ 把输入reshape成(batch_size,dim_length) """ def __init__(self): super(Flat, self).__init__() #self.size = size def forward(self, x): return x.view(x.size(0), -1) #得到的是批数据的大小
在实际使用中,直接调用model.save()及model.load(opt.load_path)即可。
其它自定义模型一般继承BasicModule,然后实现自己的模型。其中alexNet.py实现了AlexNet,resNet34实现了ResNet34。在models/__init__py中,代码如下:
from .alexnet import AlexNet from .resnet34 import ResNet34 from .squeezenet import SqueezeNet # from torchvision.models import InceptinV3 # from torchvision.models import alexnet as AlexNet
alexnet.py为:
# coding:utf8 from torch import nn from .basic_module import BasicModule class AlexNet(BasicModule): """ code from torchvision/models/alexnet.py 结构参考 <https://arxiv.org/abs/1404.5997> """ def __init__(self, num_classes=2): super(AlexNet, self).__init__() self.model_name = 'alexnet' self.features = nn.Sequential( nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2), nn.ReLU(inplace=True), # inplace-选择是否进行覆盖运算 nn.MaxPool2d(kernel_size=3, stride=2), nn.Conv2d(64, 192, kernel_size=5, padding=2), nn.ReLU(inplace=True), nn.MaxPool2d(kernel_size=3, stride=2), nn.Conv2d(192, 384, kernel_size=3, padding=1), nn.ReLU(inplace=True), nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(inplace=True), nn.Conv2d(256, 256, kernel_size=3, padding=1), nn.ReLU(inplace=True), nn.MaxPool2d(kernel_size=3, stride=2), ) self.classifier = nn.Sequential( nn.Dropout(), nn.Linear(256 * 6 * 6, 4096), nn.ReLU(inplace=True), nn.Dropout(), nn.Linear(4096, 4096), nn.ReLU(inplace=True), nn.Linear(4096, num_classes), ) def forward(self, x): x = self.features(x) x = x.view(x.size(0), 256 * 6 * 6) x = self.classifier(x) return x
resnet34.py为:
# coding:utf8 from .basic_module import BasicModule from torch import nn from torch.nn import functional as F class ResidualBlock(nn.Module): """ 实现子module: Residual Block """ def __init__(self, inchannel, outchannel, stride=1, shortcut=None): super(ResidualBlock, self).__init__() self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, 3, stride, 1, bias=False), nn.BatchNorm2d(outchannel), nn.ReLU(inplace=True), nn.Conv2d(outchannel, outchannel, 3, 1, 1, bias=False), nn.BatchNorm2d(outchannel)) self.right = shortcut def forward(self, x): out = self.left(x) residual = x if self.right is None else self.right(x) out += residual return F.relu(out) class ResNet34(BasicModule): """ 实现主module:ResNet34 ResNet34包含多个layer,每个layer又包含多个Residual block 用子module来实现Residual block,用_make_layer函数来实现layer """ def __init__(self, num_classes=2): super(ResNet34, self).__init__() self.model_name = 'resnet34' # 前几层: 图像转换 self.pre = nn.Sequential( nn.Conv2d(3, 64, 7, 2, 3, bias=False), nn.BatchNorm2d(64), nn.ReLU(inplace=True), nn.MaxPool2d(3, 2, 1)) # 重复的layer,分别有3,4,6,3个residual block self.layer1 = self._make_layer(64, 128, 3) self.layer2 = self._make_layer(128, 256, 4, stride=2) self.layer3 = self._make_layer(256, 512, 6, stride=2) self.layer4 = self._make_layer(512, 512, 3, stride=2) # 分类用的全连接 self.fc = nn.Linear(512, num_classes) def _make_layer(self, inchannel, outchannel, block_num, stride=1): """ 构建layer,包含多个residual block """ shortcut = nn.Sequential( nn.Conv2d(inchannel, outchannel, 1, stride, bias=False), nn.BatchNorm2d(outchannel)) layers = [] layers.append(ResidualBlock(inchannel, outchannel, stride, shortcut)) for i in range(1, block_num): layers.append(ResidualBlock(outchannel, outchannel)) return nn.Sequential(*layers) def forward(self, x): x = self.pre(x) x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x = self.layer4(x) x = F.avg_pool2d(x, 7) x = x.view(x.size(0), -1) return self.fc(x)
这样在主函数中就可以写成:
from models import AlexNet 或 import models model = models.AlexNet() 或 import models model = getattr('models', 'AlexNet')()
其中最后一种写法最为关键,这意味着我们可以通过字符串直接指定使用的模型,而不必使用判断语句,也不必在每次新增加模型后都修改代码。新增模型后只需要在models/__init__.py中加上from .new_module import new_module即可。
其它关于模型定义的注意事项,在上一章中已详细讲解,这里就不再赘述,总结起来就是:
- 尽量使用
nn.Sequential(比如AlexNet) - 将经常使用的结构封装成子Module(比如GoogLeNet的Inception结构,ResNet的Residual Block结构)
- 将重复且有规律性的结构,用函数生成(比如VGG的多种变体,ResNet多种变体都是由多个重复卷积层组成)
6)工具函数——实现可视化visdom
在项目中,我们可能会用到一些helper方法,这些方法可以统一放在utils/文件夹下,需要使用时再引入。在本例中主要是封装了可视化工具visdom的一些操作,其代码如下,在本次实验中只会用到plot方法,用来统计损失信息。
# coding:utf8 import visdom import time import numpy as np class Visualizer(object): """ 封装了visdom的基本操作,但是你仍然可以通过`self.vis.function` 调用原生的visdom接口 """ def __init__(self, env='default', **kwargs): self.vis = visdom.Visdom(env=env,use_incoming_socket=False, **kwargs) # 画的第几个数,相当于横座标 # 保存(’loss',23) 即loss的第23个点 self.index = {} self.log_text = '' def reinit(self, env='default', **kwargs): """ 修改visdom的配置 """ self.vis = visdom.Visdom(env=env, **kwargs) return self def plot_many(self, d): """ 一次plot多个 @params d: dict (name,value) i.e. ('loss',0.11) """ for k, v in d.items(): self.plot(k, v) def img_many(self, d): for k, v in d.items(): self.img(k, v) def plot(self, name, y, **kwargs): """ self.plot('loss',1.00) """ x = self.index.get(name, 0) self.vis.line(Y=np.array([y]), X=np.array([x]), win=name, opts=dict(title=name), update=None if x == 0 else 'append', **kwargs ) self.index[name] = x + 1 def img(self, name, img_, **kwargs): """ self.img('input_img',t.Tensor(64,64)) self.img('input_imgs',t.Tensor(3,64,64)) self.img('input_imgs',t.Tensor(100,1,64,64)) self.img('input_imgs',t.Tensor(100,3,64,64),nrows=10) !!!don‘t ~~self.img('input_imgs',t.Tensor(100,64,64),nrows=10)~~!!! """ self.vis.images(img_.cpu().numpy(), win=name, opts=dict(title=name), **kwargs ) def log(self, info, win='log_text'): """ self.log({'loss':1,'lr':0.0001}) """ self.log_text += ('[{time}] {info} <br>'.format( time=time.strftime('%m%d_%H%M%S'), info=info)) self.vis.text(self.log_text, win) def __getattr__(self, name): return getattr(self.vis, name)
7)配置文件
在模型定义、数据处理和训练等过程都有很多变量,这些变量应提供默认值,并统一放置在配置文件中,这样在后期调试、修改代码或迁移程序时会比较方便,在这里我们将所有可配置项放在config.py中。
# coding:utf8 import warnings import torch as t class DefaultConfig(object): env = 'default' # visdom 环境 vis_port =8097 # visdom 端口 model = 'SqueezeNet' # 使用的模型,名字必须与models/__init__.py中的名字一致 train_data_root = './data/train/' # 训练集存放路径 test_data_root = './data/test1' # 测试集存放路径 load_model_path = None # 加载预训练的模型的路径,为None代表不加载 batch_size = 32 # batch size use_gpu = True # user GPU or not num_workers = 4 # how many workers for loading data print_freq = 20 # print info every N batch debug_file = '/tmp/debug' # if os.path.exists(debug_file): enter ipdb result_file = 'result.csv' max_epoch = 10 lr = 0.001 # initial learning rate lr_decay = 0.5 # when val_loss increase, lr = lr*lr_decay weight_decay = 0e-5 # 损失函数
可配置的参数主要包括:
- 数据集参数(文件路径、batch_size等)
- 训练参数(学习率、训练epoch等)
- 模型参数
这样我们在程序中就可以这样使用:
import models from config import DefaultConfig opt = DefaultConfig() lr = opt.lr model = getattr(models, opt.model) dataset = DogCat(opt.train_data_root)
这些都只是默认参数,在这里还提供了更新函数,根据字典更新配置参数:
def _parse(self, kwargs): """ 根据字典kwargs 更新 config参数 """ # 更新配置参数 for k, v in kwargs.items(): if not hasattr(self, k): # 警告还是报错,取决于你个人的喜好 warnings.warn("Warning: opt has not attribut %s" % k) setattr(self, k, v) opt.device =t.device('cuda') if opt.use_gpu else t.device('cpu') # 打印配置信息 print('user config:') for k, v in self.__class__.__dict__.items(): if not k.startswith('_'): print(k, getattr(self, k))
这样我们在实际使用时,并不需要每次都修改config.py,只需要通过命令行传入所需参数,覆盖默认配置即可。
例如:
opt = DefaultConfig() new_config = {'lr':0.1,'use_gpu':False} opt.parse(new_config) opt.lr == 0.1
8)main.py
1>fire
2017年3月谷歌开源的一个命令行工具fire^3 ,通过pip install fire即可安装。下面来看看fire的基础用法,假设example.py文件内容如下:
import fire def add(x, y): return x + y def mul(**kwargs): a = kwargs['a'] b = kwargs['b'] return a * b if __name__ == '__main__': fire.Fire()
那么我们可以使用:
python example.py add 1 2 # 执行add(1, 2) python example.py mul --a=1 --b=2 # 执行mul(a=1, b=2), kwargs={'a':1, 'b':2} python example.py add --x=1 --y==2 # 执行add(x=1, y=2)
可见,只要在程序中运行fire.Fire(),即可使用命令行参数python file <function> [args,] {--kwargs,}。fire还支持更多的高级功能,具体请参考官方指南^4 。
2>main.py
在主程序main.py中,主要包含四个函数,其中三个需要命令行执行,main.py的代码组织结构如下:
def train(**kwargs): """ 训练 """ pass def val(model, dataloader): """ 计算模型在验证集上的准确率等信息,用以辅助训练 """ pass def test(**kwargs): """ 测试(inference) """ pass def help(): """ 打印帮助的信息 """ print('help') if __name__=='__main__': import fire fire.Fire()
根据fire的使用方法,可通过python main.py <function> --args=xx的方式来执行训练或者测试。
1》训练
训练的主要步骤如下:
- 定义网络
- 定义数据
- 定义损失函数和优化器
- 计算重要指标
- 开始训练
- 训练网络
- 可视化各种指标
- 计算在验证集上的指标
训练函数的代码如下:
def train(**kwargs): #根据传入的参数更改配置信息 opt._parse(kwargs) vis = Visualizer(opt.env,port = opt.vis_port) # step1: configure model配置模型 model = getattr(models, opt.model)() #默认使用模型SqueezeNet if opt.load_model_path: # 加载预训练的模型的路径 model.load(opt.load_model_path) model.to(opt.device) #使用的是GPU还是CPU # step2: data加载数据 train_data = DogCat(opt.train_data_root,train=True) #训练数据 val_data = DogCat(opt.train_data_root,train=False) #测试数据 train_dataloader = DataLoader(train_data,opt.batch_size, shuffle=True,num_workers=opt.num_workers) val_dataloader = DataLoader(val_data,opt.batch_size, shuffle=False,num_workers=opt.num_workers) # step3: criterion and optimizer ,损失函数和优化器 criterion = t.nn.CrossEntropyLoss() lr = opt.lr optimizer = model.get_optimizer(lr, opt.weight_decay) # step4: meters,统计指标:平滑处理之后的损失,还有混淆矩阵 loss_meter = meter.AverageValueMeter() #能够计算所有数的平均值和标准差,用来统计一个epoch中损失的平均值 confusion_matrix = meter.ConfusionMeter(2) #用来统计分类问题中的分类情况,是一个比准确率更详细的统计指标 previous_loss = 1e10 # train,开始训练 for epoch in range(opt.max_epoch): #迭代次数 loss_meter.reset() confusion_matrix.reset() for ii,(data,label) in tqdm(enumerate(train_dataloader)): # train model input = data.to(opt.device) target = label.to(opt.device) optimizer.zero_grad() score = model(input) loss = criterion(score,target) loss.backward() optimizer.step() # meters update and visualize,# 更新统计指标以及可视化 loss_meter.add(loss.item()) # detach 一下更安全保险 confusion_matrix.add(score.detach(), target.detach()) if (ii + 1)%opt.print_freq == 0: vis.plot('loss', loss_meter.value()[0]) # 进入debug模式 if os.path.exists(opt.debug_file): import ipdb; ipdb.set_trace() model.save() # validate and visualize,计算验证集上的指标及可视化 val_cm,val_accuracy = val(model,val_dataloader) vis.plot('val_accuracy',val_accuracy)
#loss_meter.value()返回的是loss列表的mean,std平均数和标准差,[0]则得到其平均数 vis.log("epoch:{epoch},lr:{lr},loss:{loss},train_cm:{train_cm},val_cm:{val_cm}".format( epoch = epoch,loss = loss_meter.value()[0],val_cm = str(val_cm.value()),train_cm=str(confusion_matrix.value()),lr=lr)) # update learning rate,如果损失不再下降,则降低学习率 if loss_meter.value()[0] > previous_loss: lr = lr * opt.lr_decay # 第二种降低学习率的方法:不会有moment等信息的丢失 for param_group in optimizer.param_groups: param_group['lr'] = lr previous_loss = loss_meter.value()[0]
这里用到了PyTorchNet^5里面的一个工具: meter。meter提供了一些轻量级的工具,用于帮助用户快速统计训练过程中的一些指标。AverageValueMeter能够计算所有数的平均值和标准差,这里用来统计一个epoch中损失的平均值。confusionmeter用来统计分类问题中的分类情况,是一个比准确率更详细的统计指标。例如对于表格6-1,共有50张狗的图片,其中有35张被正确分类成了狗,还有15张被误判成猫;共有100张猫的图片,其中有91张被正确判为了猫,剩下9张被误判成狗。相比于准确率等统计信息,混淆矩阵更能体现分类的结果,尤其是在样本比例不均衡的情况下。
表6-1 混淆矩阵
| 样本 | 判为狗 | 判为猫 |
|---|---|---|
| 实际是狗 | 35 | 15 |
| 实际是猫 | 9 | 91 |
PyTorchNet从TorchNet^6迁移而来,提供了很多有用的工具,但其目前开发和文档都还不是很完善,本书不做过多的讲解。
2》验证
验证相对来说比较简单,但要注意需将模型置于验证模式(model.eval()),验证完成后还需要将其置回为训练模式(model.train()),这两句代码会影响BatchNorm和Dropout等层的运行模式。验证模型准确率的代码如下。
@t.no_grad() def val(model,dataloader): """ 计算模型在验证集上的准确率等信息 """ # 把模型设为验证模式 model.eval() confusion_matrix = meter.ConfusionMeter(2) for ii, (val_input, label) in tqdm(enumerate(dataloader)): val_input = val_input.to(opt.device) score = model(val_input) confusion_matrix.add(score.detach().squeeze(), label.type(t.LongTensor)) # 把模型恢复为训练模式,要养成习惯,不实用验证模式后要将其调整回来 model.train() #计算准确率 cm_value = confusion_matrix.value() accuracy = 100. * (cm_value[0][0] + cm_value[1][1]) / (cm_value.sum()) return confusion_matrix, accuracy
3》测试:
测试时,需要计算每个样本属于狗的概率,并将结果保存成csv文件。测试的代码与验证比较相似,但需要自己加载模型和数据。
@t.no_grad() # pytorch>=0.5 def test(**kwargs): opt._parse(kwargs) #根据输入更改相应配置的值 # configure model,设置使用的模型,并将其设置为验证模式 model = getattr(models, opt.model)().eval() if opt.load_model_path: model.load(opt.load_model_path) model.to(opt.device) # data train_data = DogCat(opt.test_data_root,test=True) test_dataloader = DataLoader(train_data,batch_size=opt.batch_size,shuffle=False,num_workers=opt.num_workers) results = [] for ii,(data,path) in tqdm(enumerate(test_dataloader)): input = data.to(opt.device) score = model(input) probability = t.nn.functional.softmax(score,dim=1)[:,0].detach().tolist() # label = score.max(dim = 1)[1].detach().tolist() #将批数据中图像数据的路径和其可能性结果结合在一起,得到批数据的结果 batch_results = [(path_.item(),probability_) for path_,probability_ in zip(path,probability) ] #将这一批数据结果存储在总结果中 results += batch_results write_csv(results,opt.result_file) return results def write_csv(results,file_name): #将得到的结果写到file_name文件中,是一个.csv文件 import csv with open(file_name,'w') as f: writer = csv.writer(f) writer.writerow(['id','label']) #设置行标签 writer.writerows(results) #然后将数据写入
4》帮助函数
为了方便他人使用, 程序中还应当提供一个帮助函数,用于说明函数是如何使用。程序的命令行接口中有众多参数,如果手动用字符串表示不仅复杂,而且后期修改config文件时,还需要修改对应的帮助信息,十分不便。这里使用了Python标准库中的inspect方法,可以自动获取config的源代码。help的代码如下:
def help(): """ 打印帮助的信息: python file.py help """ print(""" usage : python file.py <function> [--args=value] <function> := train | test | help example: python {0} train --env='env0701' --lr=0.01 python {0} test --dataset='path/to/dataset/root/' python {0} help avaiable args:""".format(__file__)) from inspect import getsource source = (getsource(opt.__class__)) print(source)
当用户执行python main.py help的时候,会打印如下帮助信息:
(deeplearning) userdeMacBook-Pro:dogcat-6 user$ python main.py help usage : python file.py <function> [--args=value] <function> := train | test | help example: python main.py train --env='env0701' --lr=0.01 python main.py test --dataset='path/to/dataset/root/' python main.py help avaiable args: class DefaultConfig(object): env = 'default' # visdom 环境 vis_port =8097 # visdom 端口 ...
9)使用
正如help函数的打印信息所述,可以通过命令行参数指定变量名.下面是三个使用例子,fire会将包含-的命令行参数自动转层下划线_,也会将非数值的值转成字符串。所以--train-data-root=data/train和--train_data_root='data/train'是等价的。
# 训练模型 python main.py train --train-data-root=data/train/ --lr=0.005 --batch-size=32 --model='ResNet34' --max-epoch = 20 # 测试模型 python main.py test --test-data-root=data/test1 --load-model-path='checkpoints/resnet34_00:23:05.pth' --batch-size=128 --model='ResNet34' --num-workers=12 # 打印帮助信息 python main.py help
10)本地运行:
1》训练命令为:
python main.py train --env=main --train-data-root=./data/train/ --lr=0.005 --batch-size=32 --model='ResNet34' --max-epoch=100
指明visdom可视化工具的env为main,训练数据在文件夹./data/train/下,学习率设置为0.005,批处理大小为32,使用的模型是ResNet34,循环轮数是100次,返回的结果为:
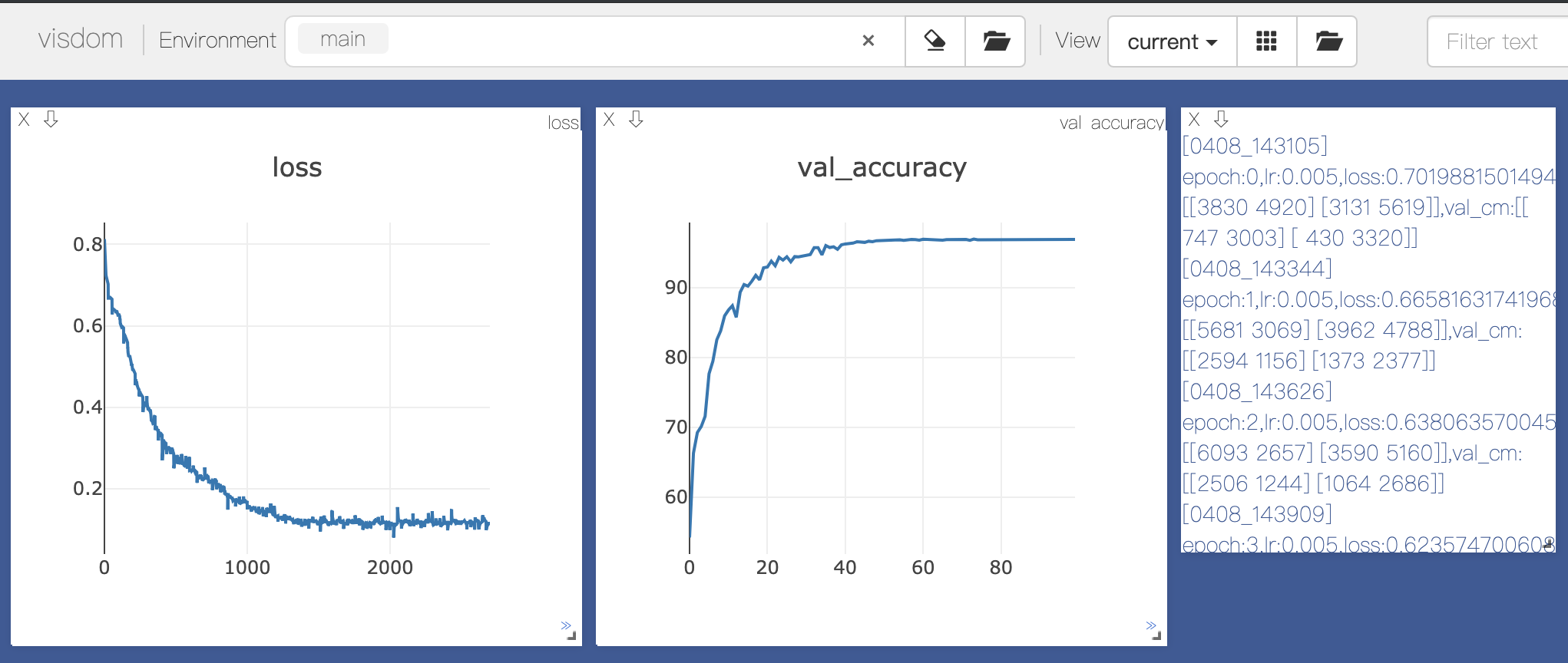
可见训练的效果不错,loss图表示损失在减少,val_accuracy图表示验证集的准确率在上升
此时checkpoint中会生成100次轮询生成的参数值,以.pth文件结尾的,可以随机选择60次轮训后训练生成的参数值来进行测试,然后查看结果看测试的效果
⚠️这里因为linux上没安装可视化工具,所以我是在Linux服务器上训练,然后从~/.visdom文件夹中将main.json下载到本地的~/.visdom文件夹中进行查看
2》测试命令为:
python main.py test --test-data-root=./data/test1 --load-model-path='checkpoints/resnet34_0408_12:02:48.pth' --batch-size=128 --model='ResNet34' --num-workers=12 --result-file=result1.csv
test-data-root指明测试集所在的文件夹,load-model-path指明使用的是那个训练后的参数,result-file说明将测试结果存储在result1.csv文件中

 浙公网安备 33010602011771号
浙公网安备 33010602011771号