

最小二乘法
最小二乘法原理与编程实现
背景
数据与数据(变量与变量)之间,很多时候是存在一些关系的,如线性关系和非线性关系。我们常常会希望找到数据之间的关系,用一个函数(或者一条曲线)去描述两个变量之间的关系。
然而因为各种原因,测量得到的数据是会存在误差的,于是我们要一种方法去减少误差带来的干扰,尽可能的描绘出数据之间的关系,这个方法就是最小二乘法,也称最小方差法。
原理
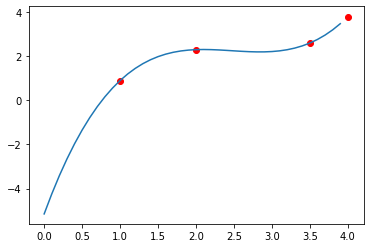
比如说,我们得到了四对数据,分别是(1,0.9),(2, 2.3),(3.5, 2.6),(4, 3.8)把它们画在平面直角坐标系上
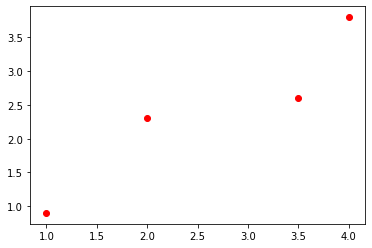
从图像上我们很容易发现,这些点大致分布在一条直线上面,于是我们大胆的猜测y与x呈线性关系,于是我们很自然地想要用一条直线去拟合他们。
也就是
然而,事实是它们只是看起来像一条直线,但实际上并不是一条直线。把方程组列出来,
求解一下就会发现,这个方程组无解!从图像上来看就是我们找不到一条直线通过所有的点。
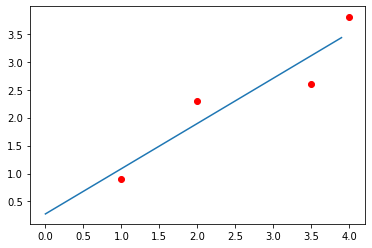
那该怎么办?那我们只好退一步,不要求找一条完全经过所有点的直线,只要求找一条能够大致刻画它们关系的直线,并且使得误差最小。那误差怎么衡量呢?
我们随便画一条直线,比如说
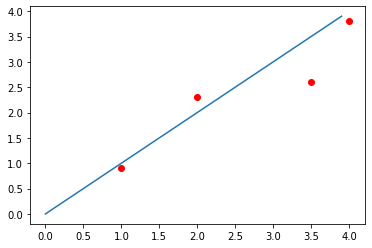
因为有些点没有落到直线上,于是我们把误差定义为每一个观测点的y值和我们预测的真实值之间的距离的平方,也就是
我们的目标是使得总体的误差最小,也就是
这是一条关于k和b的二元函数,我们求偏导数并找到导数为0的点就可以使其最小,也即是令
我们把原来的方程组写成矩阵的形式(这里把k,b当成待求参数,写成\(x_1,x_2\))
然后我们把误差写成列向量,也就是
记
则得到
要让\(E^2\)最小,即
我们对X求导
我们令其等于0,就可以解出X
这是经过计算分析得到的,那有没有一些更加直觉化的解析呢?
有!我们可以通过向量的角度去理解它的原理!
刚刚那个矩阵方程可以写成向量方程的形式,
我们记
容易看到,\(v_1\)和\(v_2\)是线性无关的,也就是它们的线性组合可以张成四维空间里的一个平面。
我们想要找的是它的某种组合使得其等于b,但这种组合找不到,于是我们就去找那个平面里的一条线,使得它到b的距离最短。容易想象那条线就是b在span(\(v_1,v_2\))下的投影,我们记该投影向量为c ,则b和c之间的距离就是\(||b-c||\),我们记为e,这时e最小,且满足e垂直与span(\(v_1,v_2\))。所以e肯定也垂直于\(v_1,v_2\),即是
这里是点乘,写成矩阵相乘就是
注意到这里是A的转置\(A^T\),再把e=(AX-b)代入得
结果是和上面推导的一样的
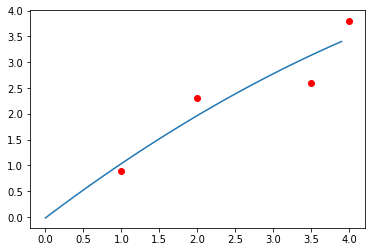
以上的方法对于二次,三次拟合都是成立的,具体可以参考其他资料。
拟合的结果
一次拟合
# -*- coding: utf-8 -*-
"""
Created on Mon Feb 17 13:51:43 2020
最小二乘法
@author: urahyou
"""
import numpy as np
import matplotlib.pyplot as plt
x = np.array([3.0, 5, 6, 8, 10])
y = np.array([5.0, 2, 1, 2, 4])
p1 = plt.scatter(x,y,c='red')
def LSD(x, y, n):
N = x.size #获取方程组个数
A = np.ones(N)
for i in range(1, n+1):
A = np.vstack((A,x**i)) #垂直拼接
A = A.T #转置回来
#求解
B = np.linalg.inv(A.T@A)@A.T
#求出解系数
sol = np.dot(B, y)
return sol
def poly(x,sol):
y = np.zeros_like(x) #每一个x,对应一个y
n = sol.size
for i in range(n):
y += sol[i]*x**i
return y
sol = LSD(x,y,2)
X = np.arange(0, 14, 0.1)
Y = poly(X,sol)
p2 = plt.plot(X,Y)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号