强化学习Chapter3——贝尔曼方程
强化学习Chapter3——贝尔曼方程
上一节介绍了衡量回报 \(R\) 的相关函数,包括状态价值函数与动作价值函数,并且介绍了二者之间的等式关系
\[V^\pi(s)=E_{a\sim\pi}[Q^\pi(s,a)]=\sum_{a}\pi(a|s)Q^\pi(s,a)\\
Q^\pi(s,a)=r(s,a)+\gamma\sum_{s'}P(s'|s,a)V^\pi(s')
\]
本节将通过这两个式子,导出贝尔曼方程
一、贝尔曼方程(Bellman equation)
根据 V 和 Q 的相互表示关系,可以预想到的是,从这两个式子可以导出类似动态规划的递归方程。下面将展示这个过程。
1、状态价值函数的贝尔曼方程
\[\begin{aligned}
V^\pi(s)&=\sum_{a}\pi(a|s)Q^\pi(s,a)\\
&=\sum_{a}\pi(a|s)[r(s,a)+\gamma\sum_{s'}P(s'|s,a)V^\pi(s')]\\
&=\sum_{a}\pi(a|s)r(s,a)+\gamma\sum_{a}\pi(a|s)\sum_{s'}P(s'|s,a)V^\pi(s')\\
&=E_{a\sim \pi}[r(s,a)]+\gamma E_{a\sim\pi}[E_{s'\sim P}[V^\pi(s')]]\\
&=E_{a\sim\pi,s'\sim P}[r(s,a)+\gamma V^\pi(s')]
\end{aligned}
\]
为了突出时间线的递推性,也可以写成:
\[V^\pi(s_t)=E_{a\sim\pi,s_{t+1}\sim P}[r(s_t,a)+\gamma V^\pi(s_{t+1})]
\]
其中 \(P\) 给定 \(s_t\) 和 \(a\) 的条件下,\(s_{t+1}\) 的分布。策略分布 \(\pi\) 与并不显式与 \(t\) 有关,毕竟大伙都只有一个脑子。
2、动作价值函数的贝尔曼方程
\[\begin{aligned}
Q^\pi(s,a)&=r(s,a)+\gamma\sum_{s'}P(s'|s,a)V^\pi(s')\\
&=r(s,a)+\gamma\sum_{s'}P(s'|s,a)\sum_{a}\pi(a'|s)Q^\pi(s,a')\\
&=r(s,a)+\gamma\sum_{s'}P(s'|s,a)E_{a'\sim\pi}[Q(s,a')]\\
&=r(s,a)+\gamma E_{s'\sim P,a'\sim\pi}E[Q(s',a')]\\
&=E_{a'\sim \pi, s'\sim P}[r(s,a)+\gamma Q(s',a')]
\end{aligned}
\]
同理,也可以写成时间线的递推形式,此处不再赘述。可见,二者的形式其实十分相近。
二、贝尔曼最优方程(Bellman optimal equation)
即采用最优策略得到的 \(V\) 和 \(Q\) 的最值 \(V^*\) 和 \(Q^*\),下面直接写出
\[V^*(s)=\max_a E_{s'\sim P}[r(s,a)+\gamma V^*(s')]\\
Q^*(s,a)=E_{s'\sim P}[r(s,a)+\gamma \max_{a'}Q^*(s',a')]
\]
可以看到的是,这里“最优”的约束全在动作上,而动作是由策略决定,因此贝尔曼最优方程,其实是最优策略对应的贝尔曼方程。
三、向量形式
为了导出贝尔曼方程(BE)与贝尔曼最优方程(BOE),首先对 BE 公式进行重写:
\[V_\pi(s)=r_\pi(s)+\gamma\sum_{s'}P_\pi(s'|s)V_\pi(s')\\
\]
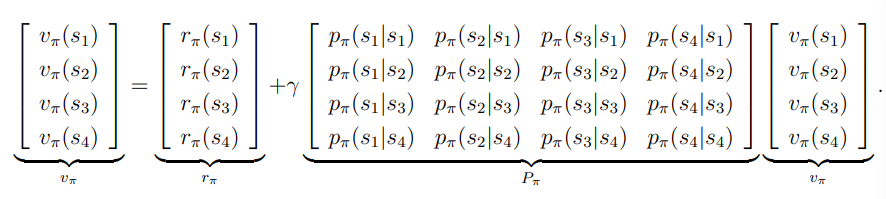
这里将策略 \(\pi\) 作为参数,简化贝尔曼方程。若将各值写成向量形式:
\[\begin{aligned}
&V_\pi = [V_\pi(s_1),...,V_\pi(s_n)]^T\in \R^n\\
&r_\pi = [r_\pi(s_1),...,r_\pi(s_n)]^T\in \R^n\\ \\
&P_\pi\in R^{n\times n}\ \ where\ [P_\pi]_{ij}=p_\pi(s_j|s_i)
\end{aligned}
\]
就能得出向量形式的贝尔曼方程:
\[V_\pi=r_\pi+\gamma P_\pi V_\pi
\]
向量形式极大简化了贝尔曼公式,如此简洁精炼,大大简化了相关公式的证明。同时这也给解贝尔曼方程提供了思路。
\[V_\pi=(I-\gamma P_\pi)^{-1}r_\pi
\]
通过矩阵运算,能够在给定 \(P_\pi,r_\pi\) 的条件下(所有状态切换信息透明),求出给定策略的状态价值函数 \(V_\pi\). 上式可直接导出下面的几个性质:
- 由于 \(P_\pi\) 半正定,有 \((I-\gamma P_\pi)^{-1}=I+\gamma P_\pi+\gamma^2 P_\pi^2+...\ge I\ge 0\),所以 \(if\ r\ge 0, then\ (I-\gamma P_\pi)^{-1}r\ge r\ge 0\).
- \(if\ r_1\ge r_2,then\ (I-\gamma P_\pi)^{-1}r_1\ge (I-\gamma P_\pi)^{-1}r_2\),即 \(v_1\ge v_2\).
由于基于矩阵求逆的算法求解贝尔曼方程,对信息需求苛刻,在某些复杂情况下可用性十分有限,因此更多寻找最优策略的算法被逐渐提出。
Reference:
- Mathematical Foundations of Reinforcement Learning. https://github.com/MathFoundationRL

 浙公网安备 33010602011771号
浙公网安备 33010602011771号