


【数据结构】哈希表的理论与实现 - 教程
2025-11-19 23:11 tlnshuju 阅读(0) 评论(0) 收藏 举报哈希表的理论
哈希表是一种基于哈希函数实现高效查找的数据结构,其核心思想是通过哈希函数将关键字映射到存储位置。
哈希表示例分析
12 18 21 24 33 45 67 72
| 21 | 45 | 24 | 18 | 12 | 33 |
|---|
哈希函数:除数留余法
| 数值 | 哈希计算 (mod 7) | 结果位置 | 冲突情况 |
|---|---|---|---|
| 12 | 12 % 7 | 5 | 与33冲突 |
| 33 | 33 % 7 | 5 | 与12冲突 |
| 18 | 18 % 7 | 4 | - |
| 45 | 45 % 7 | 3 | 与24冲突 |
| 21 | 21 % 7 | 0 | - |
| 24 | 24 % 7 | 3 | 与45冲突 |
哈希冲突/哈希碰撞了。
解决办法:1、线性探测法 2、链地址法
哈希表的搜索操作: O(1)
18 % 7 = 4 arr[4] 18
45 % 7 = 3 arr[3]
45 % 7 = 3 arr[3] ≠ 45 产生哈希冲突了,线性探测法继续找 O(1) → O(n)
哈希冲突是不可避免的,怎么减少哈希冲突?(下面讲的是线性探测法)
1、哈希函数。 如,除留余数法 让哈希表(桶)的长度:素数
2、哈希表的装载因子。 loadfactor = 已占用的桶的个数/桶的总个数 > 阈值(0.75)——→ 哈希表就需要扩容了。相当于数组的扩容(对于线性探测哈希表来说),原来哈希表中的元素,需要在新的哈希表中重新哈希。—— O(n)
均摊时间复杂度 O(1)
线性探测哈希表
增加元素:
通过哈希函数计算数据存放的位置
该位置空闲,直接存储元素,完成
该位置被占用,从当前位置向后找空闲的位置,存放该元素
查询元素:
通过哈希函数计算数据存放的位置,从该位置取值(判断状态 STATE_USEING)
该值==要查询的元素值,找到了!
该值 ≠ 要查询的元素值(之前往这个位置放元素时,发生哈希冲突了),继续遍历往后找该元素
【补充】往后遍历到什么时候结束呢?
位置是空的有两种情况:1、这个位置是空的,没放过元素 (不需要继续往后搜索) 2、这个位置是空的,以前放过元素,后来被删除了(需要继续往后搜索)
会发现桶里面只放元素是不行的,还要放桶的状态
struct Node{
int val;
State state; //当前位置的状态
}
enumState{
STATE_USEING, //正在使用
STATE_UNUSE, //从来没用过
STATE_DEL //当前位置的元素被删除
}
删除元素:
通过哈希函数计算数据存放的位置,从该位置取值,判断状态STATE_USING
该值==要删除的值,直接修改当前位置的状态就可以 STATE_DEL
该值 ≠ 要删除的值,继续往后遍历,找到该元素,修改状态,如果遇到 STATE_UNUSE,结束
实现:
#include <iostream>
using namespace std;
enum State{
STATE_UNUSE, //从未使用过的桶
STATE_USING, //正在使用的桶
STATE_DEL, //元素被删除了的桶
};
//桶的类型
struct Bucket{
Bucket(int key = 0, State state = STATE_UNUSE)
: key_(key)
, state_(state)
{}
int key_; //存储的数据
State state_; //桶的当前状态
};
//线性探测哈希表类型
class HashTable{
public:
HashTable(int size = primes_[0], double loadFactor = 0.75)
: useBucketNum_(0)
, loadFactor_(loadFactor)
, primeIdex_(0)
{
//把用户传入的size调整到最近的比较大的素数上
if(size != primes_[0]){
for(; primeIdex_ < PRIME_SIZE; primeIdex_++){
if(primes_[primeIdex_] > size)
break;
}
//用户传入的size过大,已经超过最后一个素数,调整到最会一个素数
if(primeIdex_ == PRIME_SIZE){
primeIdex_--;
}
}
tableSize_ = primes_[primeIdex_];
table_ = new Bucket[tableSize_];
}
~HashTable(){
delete[]table_;
table_ = nullptr;
}
public:
//插入元素
bool insert(int key){
//考虑扩容
double factor = useBucketNum_*1.0 / tableSize_;
cout << "factor:" << factor << endl;
if(factor > loadFactor_){
//哈希表开始扩容
expand();
}
int idx = key % tableSize_;
int i = idx;
do{
if(table_[i].state_ != STATE_USING){
table_[i].state_ = STATE_USING;
table_[i].key_ = key;
useBucketNum_++;
return true;
}
i = (i+1)%tableSize_;
}while(i != idx);
return false;
}
//删除元素
bool erase(int key){
int idx = key % tableSize_;
int i = idx;
do{
if(table_[i].state_ == STATE_USING && table_[i].key_ == key){
table_[i].state_ = STATE_DEL;
useBucketNum_--;
}
i = (i+1) % tableSize_;
}while(table_[i].state_ != STATE_UNUSE && i != idx);
return true;
}
//查询
bool find(int key){
int idx = key % tableSize_;
int i = idx;
do{
if(table_[i].state_ == STATE_USING && table_[i].key_ == key){
return true;
}
i = (i+1) % tableSize_;
}while(table_[i].state_ != STATE_UNUSE && i != idx);
return false;
}
private:
void expand(){
++primeIdex_;
if(primeIdex_ == PRIME_SIZE){
throw "HashTable is too large! can not expand anymore!";
}
Bucket* newTable = new Bucket[primes_[primeIdex_]];
for(int i = 0; i < tableSize_; i++){
if(table_[i].state_ == STATE_USING){ //旧表有效数据放到新表
int idx = table_[i].key_ % primes_[primeIdex_];
int k = idx;
do{
if(newTable[k].state_ != STATE_USING){
newTable[k].state_ = STATE_USING;
newTable[k].key_ = table_[i].key_;
break;
}
k = (k+1) % primes_[primeIdex_];
}while(k != idx);
}
}
delete[]table_;
table_ = newTable;
tableSize_ = primes_[primeIdex_];
}
private:
Bucket* table_; //指向动态开辟的哈希表
int tableSize_; //哈希表当前的长度
int useBucketNum_; //已经使用的桶的个数
double loadFactor_; //哈希表的装载因子
static const int PRIME_SIZE = 10; //素数表的大小
static int primes_[PRIME_SIZE]; //素数表
int primeIdex_; //当前使用的素数下标
};
int HashTable::primes_[PRIME_SIZE] = {3, 7, 23, 47, 97, 251, 443, 911, 1471, 42773};
int main(){
HashTable htable;
htable.insert(21);
htable.insert(32);
htable.insert(14);
htable.insert(15);
htable.insert(22);
cout << htable.find(14) << endl;
htable.erase(14);
cout << htable.find(14) << endl;
return 0;
}链式哈希表
线性探测哈希表的缺陷:
1、发生哈希冲突时,靠近O(n)的时间复杂度,存储变慢
2、多线程环境中,线性探测所用到的基于数组实现的哈希表,只能给全局的表用互斥锁来保证哈希表的原子操作,保证线程安全!
链式哈希表可以用:分段的锁!既保证了线程安全,又有一定的并发量,提高了效率!
例如:12 18 21 24 33 45 67 72 哈希函数采用除留余数法,哈希表长度7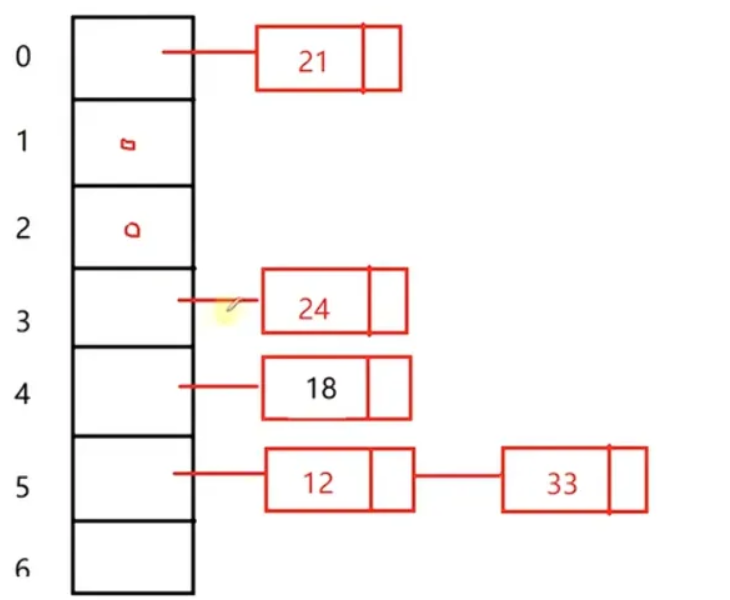
哈希表O(1) 无线趋近于O(1)—→哈希冲突的存在
每个桶的链表比较长,链表搜索花费的时间就大
优化一:当链表长度大于某个阈值时,把桶里面的这个链表转化成红黑树(搜索时间复杂度O(logn))
优化二:链式哈希表每个桶都可以创建自己的互斥锁,不同桶中的链表操作,可以互斥起来
实现:
#include <iostream>
#include <vector>
#include <list>
#include <algorithm>
using namespace std;
//链式哈希表
class HashTable{
public:
HashTable(int size = primes_[0], double loadFactor = 0.75)
: useBucketNum_(0)
, loadFactor_(loadFactor)
, primeIdex_(0)
{
if(size != primes_[0]){
for(; primeIdex_ < PRIME_SIZE; primeIdex_++){
if(primes_[primeIdex_] >= size){
break;
}
}
if(primeIdex_ == PRIME_SIZE)
primeIdex_--;
}
table_.resize(primes_[primeIdex_]);
}
public:
//增加元素 不能重复插入key
void insert(int key){
//判断扩容
double factor = useBucketNum_*1.0/table_.size();
cout << "factor:" << factor << endl;
if(factor > loadFactor_){
expand();
}
int idx = key % table_.size();
if(table_[idx].empty()){
useBucketNum_++;
table_[idx].emplace_front(key);
}
else{
//使用全局的::find泛型算法,而不是调用自己的成员方法
auto it = ::find(table_[idx].begin(), table_[idx].end(), key);
if(it == table_[idx].end()){
//key不存在
table_[idx].emplace_front(key);
}
}
}
//删除元素
void erase(int key){
int idx = key % table_.size();
auto it = ::find(table_[idx].begin(), table_[idx].end(), key);
if(it != table_[idx].end()){
table_[idx].erase(it);
if(table_[idx].empty()){
useBucketNum_--;
}
}
}
//搜索元素
bool find(int key){
int idx = key % table_.size();
auto it = ::find(table_[idx].begin(), table_[idx].end(), key);
return it != table_[idx].end();
}
private:
//扩容函数
void expand(){
if(primeIdex_ + 1 == PRIME_SIZE){
throw "HashTable is too large! can not expand anymore!";
}
primeIdex_++;
useBucketNum_ = 0;
vector<list<int>> oldTable;
//swap交换两个容器的成员变量(两个容器Allocator一样时),不涉及数据拷贝,效率很高
table_.swap(oldTable); //table_ 与 oldTable交换后,table_变为空
table_.resize(primes_[primeIdex_]);
for(auto list : oldTable){
for(auto key : list){
int idx = key % table_.size();
if(table_[idx].empty()){
useBucketNum_++;
}
table_[idx].emplace_front(key);
}
}
}
private:
vector<list<int>> table_;
int useBucketNum_; //记录使用的桶的个数
double loadFactor_; //记录哈希表的装载因子
static const int PRIME_SIZE = 10; //素数表的大小
static int primes_[PRIME_SIZE]; //素数表
int primeIdex_; //当前使用的素数下标
};
int HashTable::primes_[PRIME_SIZE] = {3, 7, 23, 47, 97, 251, 443, 911, 1471, 42773};
int main(){
HashTable htable;
htable.insert(21);
htable.insert(32);
htable.insert(14);
htable.insert(15);
htable.insert(22);
htable.insert(23);
cout << htable.find(15) << endl;
htable.erase(15);
cout << htable.find(15) << endl;
return 0;
}哈希表总结
哈希表的核心定义:存储位置=f(关键字) 一个关键字通过散列函数进行映射,得到其存储位置。这种技术称为散列技术。f称为哈希函数或者散列函数。采用散列技术将记录存储在一块连续的存储空间中,这块连续的存储空间称为哈希表。
优势:快速查找,时间复杂度O(1)
缺点:链式哈希表每一个节点既要存数据,又要存地址,内存空间占用了比较大。空间换时间。
散列函数:
设计特点: 计算简单(复杂度会降低查找的时间)、散列地址分布均匀(减少哈希冲突)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号