

好的,我们来详细拆解图片中关于计算复杂度的分析。核心结论是:文中描述的线性Attention方案,其计算复杂度为 O(nd²)。这意味着计算量随着序列长度n线性增长,而不是像标准Softmax Attention那样平方增长。关键在于 d是固定的模型超参数(隐藏层维度),而n是变化的序列长度。d是常数:在模型设计好后,隐藏层的维度d - 实践
2025-09-19 16:29 tlnshuju 阅读(38) 评论(0) 收藏 举报文章阅读笔记:https://kexue.fm/archives/11033
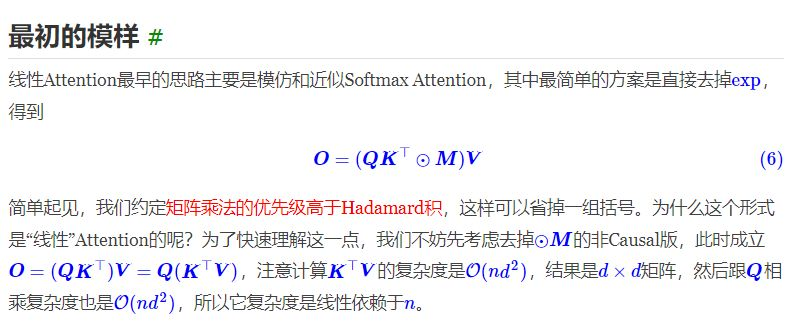
一、为什么是线性注意力
好的,我们来详细拆解图片中关于计算复杂度的分析。
核心结论是:文中描述的线性Attention方案,其计算复杂度为 O(nd²)。这意味着计算量随着序列长度 n 线性增长,而不是像标准Softmax Attention那样平方增长。
1. 复杂度分析(分步详解)
公式为 O = (QKᵀ)V,并通过结合律将其重写为 O = Q(KᵀV)。计算分两步进行:
第一步:计算 P = KᵀV
- 操作:矩阵
K的转置(维度为d×n)乘以矩阵V(维度为n×d)。 - 维度变化:(
d×n) × (n×d) =d×d - 计算量分析:
- 结果矩阵
P的每个元素都是K的一列(长度为n)与V的一行(长度为n)的内积。 - 计算一个内积需要进行
n次乘法和n-1次加法,近似为O(n)次操作。 - 结果矩阵
P有d × d个元素。 - 因此,总计算量为:
(d × d) × O(n) = O(n * d²)。
- 结果矩阵
第二步:计算 O = QP
- 操作:矩阵
Q(维度为n×d)乘以上一步的结果P(维度为d×d)。 - 维度变化:(
n×d) × (d×d) =n×d - 计算量分析:
- 结果矩阵
O的每个元素都是Q的一行(长度为d)与P的一列(长度为d)的内积。 - 计算一个内积需要进行
d次乘法和d-1次加法,近似为O(d)次操作。 - 结果矩阵
O有n × d个元素。 - 因此,总计算量为:
(n × d) × O(d) = O(n * d²)。
- 结果矩阵
总复杂度
将两步的复杂度相加:O(nd²) + O(nd²) = O(nd²)。
“线性”复杂度?就是2. 为什么
关键在于 d 是固定的模型超参数(隐藏层维度),而 n 是变化的序列长度。
-
d是常数:在模型设计好后,隐藏层的维度d(例如512, 768, 1024等)就固定了。它不会随着输入序列的增长而变化。 -
n是变量:输入序列的长度n可以变化,比如一个句子可以有10个词,也可以有1000个词。
因此,总复杂度 O(nd²) 可以看作是:O(nd²) = d² * O(n)
由于 d² 是一个常数系数,所以整个计算量随着序列长度 n 线性增长,即 O(n)。
3. 与标准Softmax Attention的对比
为了更好地理解为什么这种线性Attention更高效,我们对比一下标准Softmax Attention的计算步骤:
- 计算注意力分数矩阵:
A = QKᵀ- 维度:(
n×d) × (d×n) =n×n - 计算量:
O(n²d)
- 维度:(
- 应用Softmax和Mask(可选):
A' = softmax(A ⊙ M)- 对
n×n矩阵的每一行进行Softmax,计算量:O(n²)
- 对
- 加权求和:
O = A'V- 维度:(
n×n) × (n×d) =n×d - 计算量:
O(n²d)
- 维度:(
标准Attention的总复杂度为 O(n²d + n²d) = O(n²d)。
由于 d 是常数,复杂度主要取决于 n²。当序列长度 n 翻倍时,计算量会变为原来的4倍(平方增长)。而对于线性Attention,序列长度 n 翻倍,计算量仅变为原来的2倍(线性增长)。这在处理长序列(如长文档、高分辨率图像)时优势巨大。
总结
| 特性 | 标准Softmax Attention | 文中线性Attention |
|---|---|---|
| 核心运算 | O = softmax(QKᵀ)V | O = (QKᵀ)V = Q(KᵀV) |
| 复杂度 | O(n²d) | O(nd²) |
| 关于n的增长 | 平方增长 (O(n²)) | 线性增长 (O(n)) |
| 关键区别 | 必须计算并存储巨大的 n×n 注意力矩阵 | 通过结合律,避免了 n×n 矩阵,始终操作 d×d 或 n×d 矩阵 |
因此,文中的计算复杂度 O(nd²) 是通过矩阵乘法的结合律巧妙地避免计算庞大的 n×n 矩阵,将问题转化为两个复杂度仅为 O(nd²) 的矩阵乘法之和而得出的。
二、为什么相等
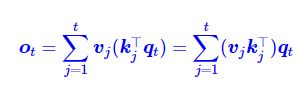
好的,我们来详细解释为什么图片中的这个等式成立。
ot=∑j=1tvj(kj⊤qt)=∑j=1t(vjkj⊤)qt
这个等式成立的核心原因在于标量与矩阵相乘的结合律和分配律。我们可以从数学运算的优先级和维度分析两个角度来理解。
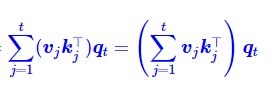
1. 从运算优先级和结合律角度理解
我们先来看等式中间的项:v_j (k_jᵀ q_t)
k_jᵀ是一个 行向量 (1×d 维)q_t是一个 列向量 (d×1 维)k_jᵀ q_t的结果是这两个向量的内积(点积)。一个行向量乘以一个列向量,结果是一个标量(一个数字)。- 因此,
v_j (k_jᵀ q_t)就是一个向量v_j 乘以一个标量。这在数学上是完全有效的,结果是将向量v_j的每个元素都放大这个标量倍。
现在再看等式最右边的项:(v_j k_jᵀ) q_t
v_j是一个 列向量 (d_v×1 维)k_jᵀ是一个 行向量 (1×d_k 维)v_j k_jᵀ的结果是这两个向量的外积。一个列向量乘以一个行向量,结果是一个矩阵 (d_v×d_k 维)。- 然后这个矩阵再乘以列向量
q_t(d_k×1 维),结果得到一个列向量 (d_v×1 维),这与等式左边的o_t维度一致。
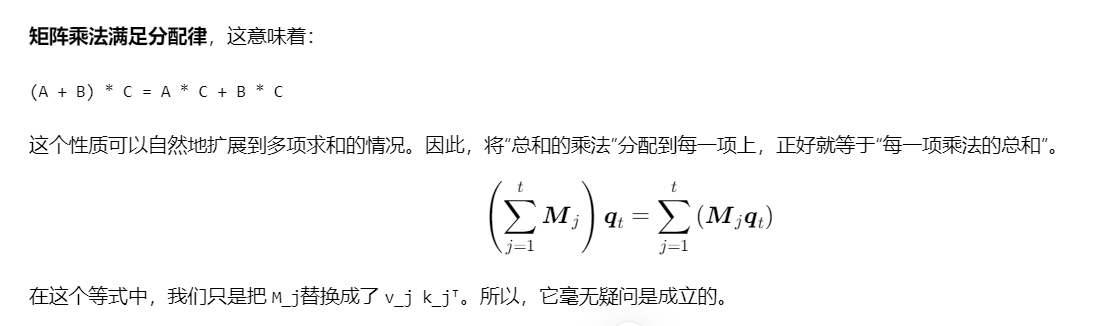
为什么两者相等?
因为矩阵乘法满足结合律。我们可以把整个运算看作三个矩阵(向量)A = v_j, B = k_jᵀ, C = q_t 的连乘。结合律保证了:(A * B) * C = A * (B * C)
A * (B * C): 先计算内积(B * C)(得到一个标量),再让向量A乘以这个标量。(A * B) * C: 先计算外积(A * B)(得到一个矩阵),再让这个矩阵乘以向量C。
这两种计算路径的最终结果完全相同。
2. 依据一个简单的数值例子来验证
为了更直观地理解,我们假设向量都是二维的。
令:v_j = [a, b]ᵀ (列向量)k_j = [c, d]ᵀ -> 所以 k_jᵀ = [c, d] (行向量)q_t = [e, f]ᵀ (列向量)
计算中间路径:v_j (k_jᵀ q_t)
- 先计算内积:
k_jᵀ q_t = [c, d] * [e, f]ᵀ = c*e + d*f(一个标量,记为S) - 再计算:
v_j * S = [a, b]ᵀ * S = [a*S, b*S]ᵀ = [a*(ce+df), b*(ce+df)]ᵀ
计算右边路径:(v_j k_jᵀ) q_t
- 先计算外积:
v_j k_jᵀ = [a, b]ᵀ * [c, d] = [[a*c, a*d], [b*c, b*d]](一个2x2矩阵) - 再矩阵乘向量:
[[a*c, a*d], [b*c, b*d]] * [e, f]ᵀ = [a*c*e + a*d*f, b*c*e + b*d*f]ᵀ = [a*(ce+df), b*(ce+df)]ᵀ
结论: 两种计算方法得到了完全一样的结果 [a*(ce+df), b*(ce+df)]ᵀ。
3. 在注意力机制中的意义
这个等式在Transformer的线性注意力机制中至关重要,它实现了计算复杂度的“降维打击”。
- 原始方法(等式中间):计算每个
j时,都需要计算一个内积(k_jᵀ q_t)(复杂度O(d))然后乘以向量。对于从1到t的求和,总复杂度是 O(t * d)。 - 创新方法(等式右边):它揭示了一种全新的计算顺序。我们可以先将所有的
(v_j k_jᵀ)加起来,再统一乘以q_t。S_t = ∑(j=1 to t) (v_j k_jᵀ)(这是一个矩阵)o_t = S_t q_t(这是一个矩阵乘向量)
这种办法的巨大优势在于:
- 状态复用:矩阵
S_t可以通过递归公式S_t = S_(t-1) + v_t k_tᵀ来更新,而不需要存储所有的历史Key和Value。 - 计算高效:计算输出
o_t时,只需要做一次矩阵乘法S_t q_t(复杂度O(d²)),而不再依赖于历史长度t。这使得总复杂度从 O(t * d) 降为 O(d²)线性复杂度 就是(对于每个时间步),对于整个序列就O(n * d²),远优于标准注意力的平方复杂度 O(n² * d)。
总结
这个等式之所以成立,是基于矩阵乘法结合律这一基本数学原理。它绝不是一个近似或技巧,而是一个精确的、恒等的数学变换。
正是这个恒等式,为线性注意力模型供应了理论基础,使其能够将计算过程转化为一种类似RNN的递推形式,从而实现了计算效率的巨大提升,解决了传统Transformer模型在处理长序列时的核心瓶颈。
三、为什么相等
三、deltanet优化
好的,经过仔细分析苏剑林的这篇《线性注意力简史:从模仿、创新到反哺》,大家可以针对 DeltaNet 模型提出以下几个非常有潜力的改进方向。
DeltaNet的核心思想是使用Delta Rule(即在线学习中的最小均方算法)来更新状态矩阵 S_t,其公式为:S_t = S_{t-1} + (v_t - S_{t-1} k_t) k_t^T
这是一个非常优雅的模型,但从文章的描述和其数学性质来看,仍有可以完善和探索的空间。
DeltaNet 的潜在改进方向
1. 引入数据依赖的遗忘门(Data-Dependent Gating)
- 当前局限:标准的DeltaNet没有显式的遗忘机制。它通过
(v_t - S_{t-1} k_t)来“纠正”当前状态,这是一种隐式的、以误差驱动的更新。但对于序列建模,显式地、根据输入内容来决定遗忘多少旧信息往往更有效(如Mamba、GLA等模型所示)。 - 改进方案:借鉴 Gated DeltaNet (GDN) 和 Mamba 的思想,将更新规则中的学习率
η_t或一个衰减因子γ_t变为由数据驱动的函数。- 公式改进:
S_t = γ_t ⊙ S_{t-1} + η_t (v_t - S_{t-1} k_t) k_t^T - 其中,
γ_t(遗忘门) 和η_t(写入门) 可以是通过线性层或轻量级网络从当前输入(k_t, v_t)甚至当前状态S_{t-1}计算而来的向量或标量。这使模型能动态决定“记住多少”和“学习多少”。
- 公式改进:
- 挑战:保持模型的线性特性以利于高效并行训练。门控信号应仅依赖于当前输入,而不能引入对
S_{t-1}的非线性依赖,否则会破坏其并行化能力。
2. 增强状态矩阵的表达能力
- 当前局限:DeltaNet的状态
S_t是一个d x d的矩阵,它通过外积v_t k_t^T进行更新。这种方式的参数效率可能不是最高的,其表征能力可能存在上限。 - 改进方案:
- 多头DeltaNet(Multi-Scale DeltaNet):将
k和v的维度拆分到多个头(head)上,每个头独立运行DeltaNet规则。这相当于扩展了状态矩阵的“宽度”,让模型能捕获不同模式的信息。文中的DeltaProduct可以视作这种思路的尝试。 - 高阶状态更新:探索超越一阶外积的更新方式。例如,是否可以引入一个低秩因子分解,用两个更小的矩阵
U_t和V_t来更新状态,即S_t = S_{t-1} + U_t V_t^T,其中U_t和V_t由当前输入计算得到。这可以在不显著增加计算量的前提下增加模型的灵活性。
- 多头DeltaNet(Multi-Scale DeltaNet):将
3. 与先进位置编码的深度融合
- 当前局限:文章中提到PaTH Attention将DeltaNet的思想反哺到了Softmax Attention的位置编码中。这说明DeltaNet的数学形式本身蕴含着一种动态的、内容感知的位置信息。
- 改进方案:显式地将DeltaNet机制设计为一个独立的位置编码模块。例如:
- 除了主导的DeltaNet层,许可并行维护一个专门用于生成位置偏置(Bias)的DeltaNet。这个“位置DeltaNet”的输入是某种形式的位置id嵌入,其输出的状态矩阵可以作为一种动态的ALiBi偏置,加到主Attention的分数上。
- 这种改进不是直接修改DeltaNet的核心算法,而是将其作为一种强大的工具来增强整个模型架构,使其能更好地处理长度外推和感知位置信息。
4. 优化并行化实现与数值稳定性
- 当前局限:即使DeltaNet在理论上可以并行化(通过求解线性系统),但其高效实现非常复杂,依赖于精巧的数学变换和CUDA内核编程,如文中“求逆与推广”一节所述。这对于其广泛应用是一个障碍。
- 改进方案:
- 构建更简洁、更硬件友好的并行算法:寻找等价于DeltaRule的递推公式,使其能像Linear Attention或Chunkwise形式的SSM那样,用分块矩阵乘法高效实现,从而更好地利用GPU的Tensor Core。
- 数值稳定性:
S_t = S_{t-1} (I - k_t k_t^T) + v_t k_t^T中的(I - k_t k_t^T)项在数值上可能是不稳定的,尤其是在长期迭代后。研究如何通过数值分析技术(如重新正交化、更好的初始化)来保证训练和长序列推理时的稳定性是一个重要的工程改进点。
5. 探索超越平方损失的目标函数
- 当前局限:DeltaNet源于在线学习中对平方损失
||S k_t - v_t||^2的优化。平方损失假设误差服从高斯分布,但这对于复杂的Token间关系可能不是最优的。 - 改进方案:在TTT(Test Time Training)的框架下,探索其他损失函数。例如:
- 使用Huber损失,它对异常值不如平方损失敏感,可能使训练更稳定。
- 对于分类任务,可以探索基于对比学习的损失函数,让状态矩阵
S_t不仅学会重建v_t,还能拉近正确token表征间的距离,推远错误token间的距离。 - 这相当于为DeltaNet设计一个新的“学习目标”,可能会带来性能的提升。
总结
| 改进方向 | 核心思想 | 潜在收益 | 主要挑战 |
|---|---|---|---|
| 材料依赖遗忘门 | 让模型根据输入动态决定遗忘和更新速率 | 提升模型灵活性,适应不同上下文 | 保持线性特性以实现并行化 |
| 增强状态表达能力 | 采用多头或更困难的因子化更新 | 提升参数效率和模型容量 | 控制计算复杂度 |
| 深度融合位置编码 | 将DeltaNet用作动态位置偏置生成器 | 改善长度外推和位置感知能力 | 模块设计的有效性 |
| 优化并行建立 | 开发分块矩阵乘法等硬件友好算法 | 降低实现门槛,提升训练/推理速度 | 算法的正确性与数值稳定性 |
| 探索新损失函数 | 在TTT框架下尝试Huber、对比损失等 | 可能获得更优的优化目标和性能 | 新损失函数的可导性和效果 |
DeltaNet是一个建立在坚实数学基础(在线学习)上的模型,其“除旧迎新”的机制非常优雅。上述改进方向旨在保留其核心优势的同时,在灵活性、表达能力、效率和稳定性等方面进行增强。其中,引入素材依赖的门控机制和优化其并行化搭建最有 immediate value 的两个方向。就是可能

 浙公网安备 33010602011771号
浙公网安备 33010602011771号