记一次迭代中历史路径bug定位过程;
项目背景:现项目主要是做关于机器人的调度系统,涉及到web端、移动端、小程序及服务端和实体机器人端;
迭代背景:采用的敏捷开发,迭代周期为两周,本次迭代的US为机器人在地图上位置显示及路径显示,主要涉及到地图、设备状态、设备位置、电梯等状态信息展示;
记录方向:历史路径bug定位
记录时间:20210109
===================================================
关于历史路径描点存在两个问题:
1、历史数据描点存在问题(画出来的历史路径会飘-从肉眼观看就知道历史路径存在问题);
bug定位过程:
a、刷新重新发起请求,复现该情况,是否是一直出现,该步骤是测试过程中提bug的必要步骤,必须是能够重现的,不然你提bug的时候现象描述得有相关的证据来佐证你的bug的真实性;
b、浏览器开发者工具检查请求接口,主要检查该接口的请求状态、响应报文,检查报文中返回的历史数据是否正确;当然这一步得结合数据的来进行检查了,通过写相关的查询语句来检查;
历史路径存储使用的mongodb+redis的方式,mongodb做数据持久化,redis做5分钟内数据的缓存,持久化的策略是5分钟持久化一次;在这过程中学习了一下mongodb的如何进行查询,后面可以把mongodb的相关学习文章贴出来;
c、检查历史路径查询的方式,在现项目中历史路径的查询方式:在查询过程中对数据进行了压缩采用的是道格拉斯算法;
d、检查数据本身的正确性,该数据是机器人通过mqtt方式与服务端进行交互的,在存储的过程中服务端没有对数据内容进行任何加工,只对数据进行了分组分包的的方式,5分钟持久化一次,一分钟一个包,一个包中包含了多个分组标签,一个标签代表了一段路径;
最后发现机器人上送位置数据有问题,当机器人开机或者重启后会出现定位丢失的情况,上送的位置信息数据是错误的,所以在地图上描述出的路径是有问题的;
针对上送的位置数据有问题做了如下方案:
- 第一种方案:对机器人上送的位置信息数据做异常数据筛选,剔除异常数据;
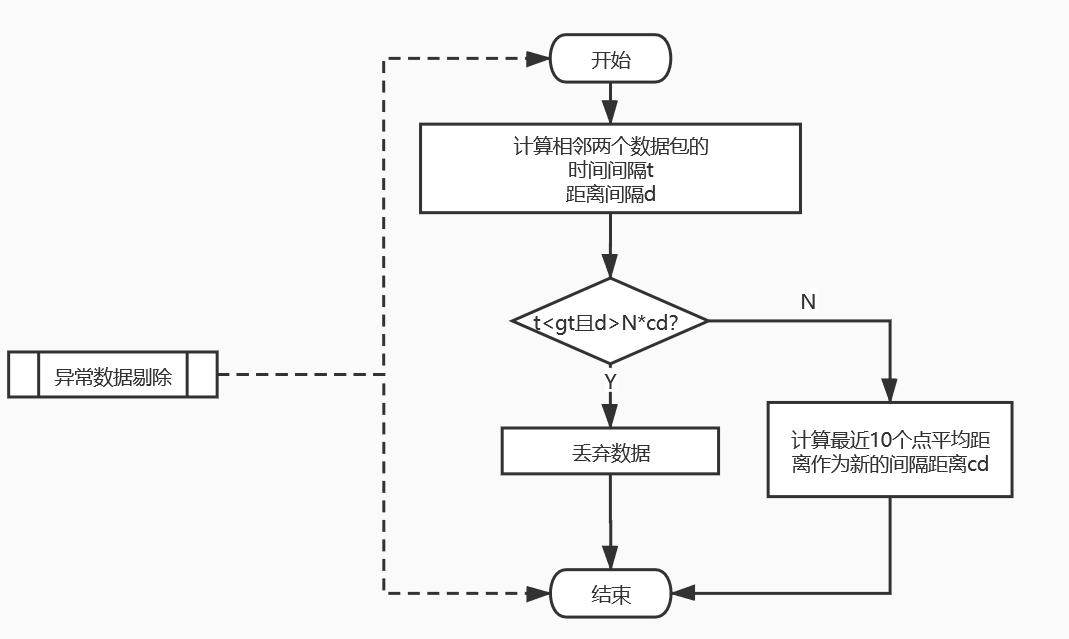
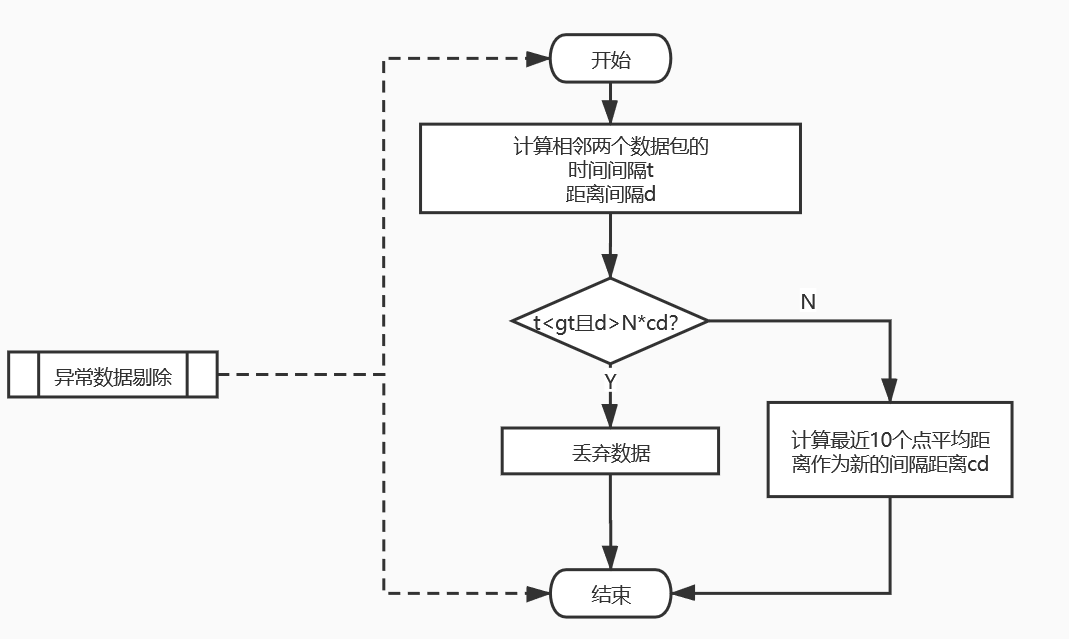
- 第二种方案:联合机器人做一个机器人开机自检的init接口,在上送的位置信息里面加一个标志位,来表示机器人是否定位成功,这个方案比较靠谱,但是需要机器人端实现,只是提出来这种方案;
2、右侧的测试列表状态信息存在闪烁的情况,一会儿状态有,一会儿状态没有;
该机器人列表的实现逻辑:请求或者刷新的时候通过接口返回机器人的状态:在线、离线(服务端10s是否订阅到机器人端发布的topic);停留在该界面机器人离线变在线,在线变离线的判断逻辑为10s内前段是否订阅到该设备的位置信息或者状态信息;
后面检查得知服务端订阅到的机器人的topic中时间戳与服务端的时间不一致,导致解析topic中的payload的时候判断出错;
3、获取历史数据接口请求响应慢,部分接口请求响应时间多达14s,有时候回出现超时情况(前段设置了超时时间)
a、打开浏览器开发者工具,检查接口请求情况有,检查接口详情中的timing时间统计信息,发现reques/response时间消耗达到14s;
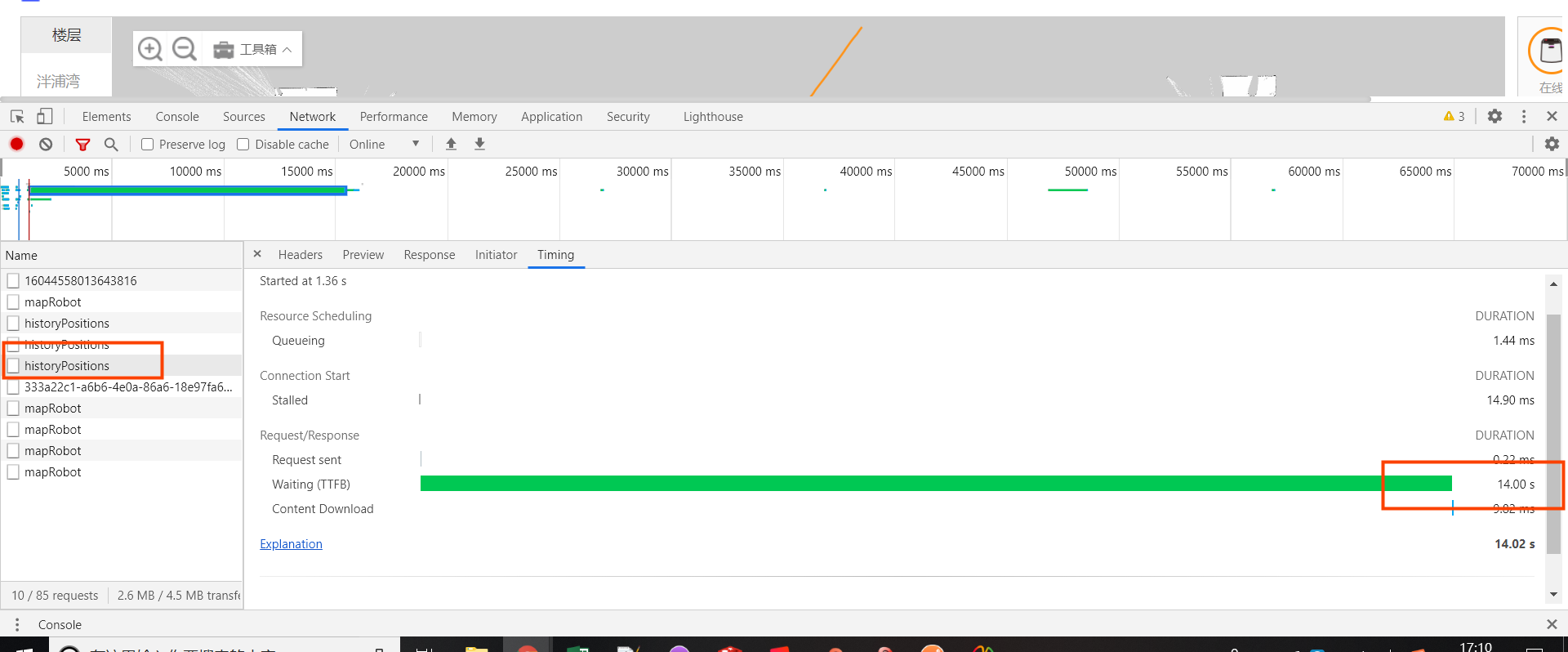
b、检查response中的响应body,发现数据量提别大;
优化:服务端对历史数据查询进行优化压缩,效果不明显;
c、检查mongodb中的查询时间;
优化:mongodb数据库添加查询索引,效果不明显;
d、数据检查,其他设备的历史数据查询消耗的时间远远小于该设备查询时间,检查该设备的具体数据,发现该设备的存在多楼层的历史数据;
后续的优化方案待定,需要等后续方案确定后在进行补充;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号