

(笔记)(9)AMCL包源码分析 | amcl_node.cpp (二)
AMCL定位算法主要是适用于激光传感器,所以对激光数据的处理是比较重要的一环。这一讲,我们将对amcl_node.cpp的laserReceived函数进行分析。
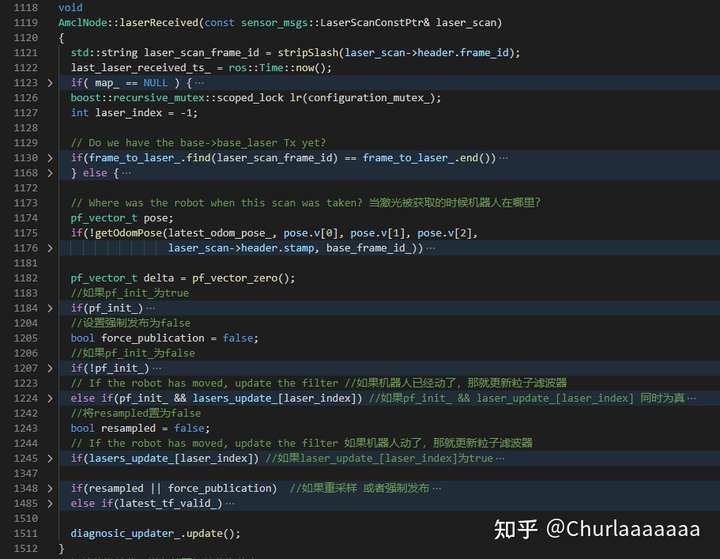 图1.laserReceived函数总览
图1.laserReceived函数总览
从主要条件分支可以看出,确认了map是否已接收,是否有base_laser->base_link的转换关系,当激光被获取时机器人的位置在何处。以及考虑了粒子滤波器有无更新的情况,考虑激光更新的情况,如果是重采样或者是强制发布,那又如何处理。
//首先定义激光的坐标系id,从laser_scan的header那里获得frame_id
std::string laser_scan_frame_id = stripSlash(laser_scan->header.frame_id);
last_laser_received_ts_ = ros::Time::now();1.地图为空的情况
如果地图为空,那么就不需要往下进行了。
if( map_ == NULL ) {
return;
}这里加入一个互斥锁,以及初始化laser_index的序号:
boost::recursive_mutex::scoped_lock lr(configuration_mutex_);
int laser_index = -1;2.确认base_laser->base的坐标系转换关系
先来一个条件判定:
if(frame_to_laser_.find(laser_scan_frame_id) == frame_to_laser_.end())是的话,进入下面的代码:
//对激光传感器laser_,激光传感器数据更新lasers_update_,激光射线laser_index进行初始化
lasers_.push_back(new AMCLLaser(*laser_));
lasers_update_.push_back(true);
laser_index = frame_to_laser_.size();
//定义一个新点ident
geometry_msgs::PoseStamped ident;
//定义点ident的坐标系为激光坐标系
ident.header.frame_id = laser_scan_frame_id;
ident.header.stamp = ros::Time();
//初始化ident的位姿
tf2::toMsg(tf2::Transform::getIdentity(), ident.pose);
//定义一个新点 laser_pose
geometry_msgs::PoseStamped laser_pose;
//读取ident(激光坐标系下的点),目标点:laser_pose(?坐标系下的点),base_frame_id(base_link坐标系)
//坐标转换关系
try
{
this->tf_->transform(ident, laser_pose, base_frame_id_);
}
catch(tf2::TransformException& e)
{
//如果捕捉到异常会报错,报错内容为:不能从激光坐标系变换到base_link坐标系
ROS_ERROR("Couldn't transform from %s to %s, "
"even though the message notifier is in use",
laser_scan_frame_id.c_str(),
base_frame_id_.c_str());
return;
}
//新建一个位姿laser_pose_v,来接收laser_pose
pf_vector_t laser_pose_v;
laser_pose_v.v[0] = laser_pose.pose.position.x;
laser_pose_v.v[1] = laser_pose.pose.position.y;
// laser mounting angle gets computed later -> set to 0 here!
laser_pose_v.v[2] = 0;
//将这个位姿用SetLaserPose函数保存到laser_激光传感器容器中
lasers_[laser_index]->SetLaserPose(laser_pose_v);
//这里可以打印出激光扫描到点的位置
ROS_DEBUG("Received laser's pose wrt robot: %.3f %.3f %.3f",
laser_pose_v.v[0],
laser_pose_v.v[1],
laser_pose_v.v[2]);
//将laser_index赋给frame_to_laser_
frame_to_laser_[laser_scan_frame_id] = laser_index;否则的话,就说明我们已经有了激光的位姿,retrieve激光的序号index:
// we have the laser pose, retrieve laser index
laser_index = frame_to_laser_[laser_scan_frame_id];3.确认激光被获取时激光与机器人的位姿有关联
// Where was the robot when this scan was taken? 当激光被获取的时候机器人在哪里?
//先定义一个位姿pose
pf_vector_t pose;
//进入getOdomPose函数进行判断,输入的是latest_odom_pose_,新建的位姿pose,
//激光的header.stamp,base_link坐标系
if(!getOdomPose(latest_odom_pose_, pose.v[0], pose.v[1], pose.v[2],
laser_scan->header.stamp, base_frame_id_))
{
//报错:无法决定机器人的位置当获取激光时
ROS_ERROR("Couldn't determine robot's pose associated with laser scan");
return;
}
//再定义一个里程计运动的差值delta
pf_vector_t delta = pf_vector_zero();
//这里定义的pose,delta均进入下面的粒子滤波器是否初始化的条件下处理4.当粒子滤波器初始化标志符为真
//如果pf_init_为true
if(pf_init_)
{
// Compute change in pose 好好计算位姿的改变
//delta=pose-pf_odom_pose(粒子滤波器里的里程计位姿,代表旧的位姿)
delta.v[0] = pose.v[0] - pf_odom_pose_.v[0]; //新的位姿-旧的位姿
delta.v[1] = pose.v[1] - pf_odom_pose_.v[1];
//使用angle_diff函数求出角度的改变
delta.v[2] = angle_diff(pose.v[2], pf_odom_pose_.v[2]);
//看是否要更新粒子滤波器 跟d_thresh 和a_thresh比较
// See if we should update the filter
bool update = fabs(delta.v[0]) > d_thresh_ ||
fabs(delta.v[1]) > d_thresh_ ||
fabs(delta.v[2]) > a_thresh_;
//更新或者强制更新
update = update || m_force_update;
//将强制更新设置为false
m_force_update=false;
// Set the laser update flags
if(update) //如果更新
//遍历laser_update_,将laser_update_中的每个元素置为true
for(unsigned int i=0; i < lasers_update_.size(); i++)
lasers_update_[i] = true;
}
//设置强制发布为false
bool force_publication = false;5.当粒子滤波器初始化标志符为假
//如果pf_init_为false
if(!pf_init_)
{
//取出在最后一个粒子滤波器更新时的位姿,将这个位姿赋给pf_odom_pose_
// Pose at last filter update
pf_odom_pose_ = pose;
// Filter is now initialized 滤波器现在已更新
pf_init_ = true;//将pf_init_置为true
// Should update sensor data 应该更新sensor数据
//遍历laser_update_,将laser_update_中的每个元素置为true
for(unsigned int i=0; i < lasers_update_.size(); i++)
lasers_update_[i] = true;
//设置强制发布为true
force_publication = true;
//重采样数目为0
resample_count_ = 0;
}6.如果粒子滤波器初始化标识符与激光传感器更新符同时为真
这里主要是设置运动模型数据odata去更新粒子滤波器。
//如果机器人已经动了,那就更新粒子滤波器
// If the robot has moved, update the filter
//如果pf_init_ && laser_update_[laser_index] 同时为真
else if(pf_init_ && lasers_update_[laser_index])
{
//printf("pose\n");
//pf_vector_fprintf(pose, stdout, "%.3f");
//建立里程计运动模型数据
AMCLOdomData odata;
//将pose的值赋给odata
odata.pose = pose;
//微小改变运动模型的数据,使得滤波器能够获得正确的更新
// HACK
// Modify the delta in the action data so the filter gets
// updated correctly
odata.delta = delta;
//使用运动模型去更新粒子滤波器
// Use the action data to update the filter
odom_->UpdateAction(pf_, (AMCLSensorData*)&odata);
}
//将已重采样标志resampled置为false;因为还没有重采样呐
bool resampled = false;7.激光传感器更新符为真
激光的数据data从激光传感器实际扫描到的距离数组送入观测模型,进行粒子滤波器的更新,进一步进行重采样,重采样完了,将粒子滤波器的粒子sample集取出来,作为粒子云发布出去。
// If the robot has moved, update the filter 如果机器人动了,那就更新粒子滤波器
if(lasers_update_[laser_index]) //如果laser_update_[laser_index]为true
{
AMCLLaserData ldata;//创建ldata
ldata.sensor = lasers_[laser_index];//用laser[laser_index]填充ldata.sensor
//laser_scan的ranges尺寸等于ldata的range_count
ldata.range_count = laser_scan->ranges.size();
// To account for lasers that are mounted upside-down, we determine the
// min最小, max最大, and increment增加角度 angles of the laser in the
// base frame base坐标系.
// Construct min and max angles of laser, in the base_link frame.
//定义四元数q
tf2::Quaternion q;
//q用于接收laser_scan的最小角度
q.setRPY(0.0, 0.0, laser_scan->angle_min);//接收来自laser_scan的
geometry_msgs::QuaternionStamped min_q, inc_q;
min_q.header.stamp = laser_scan->header.stamp;//接收来自laser_scan的
min_q.header.frame_id = stripSlash(laser_scan->header.frame_id);
tf2::convert(q, min_q.quaternion);//将q转换成min_q
//q接收来自laser_scan的最小角度+角分辨率
q.setRPY(0.0, 0.0, laser_scan->angle_min + laser_scan->angle_increment);
inc_q.header = min_q.header;
tf2::convert(q, inc_q.quaternion);//将新q转换成inc_q
//min_q激光坐标系,base_frame_id(base_link坐标系)
try
{
tf_->transform(min_q, min_q, base_frame_id_);
tf_->transform(inc_q, inc_q, base_frame_id_);
}
catch(tf2::TransformException& e)
{
//报错:不能将最小/最大角度转换到base_link坐标系中
ROS_WARN("Unable to transform min/max laser angles into base frame: %s",
e.what());
return;
}
//定义最小角度
double angle_min = tf2::getYaw(min_q.quaternion);
//定义角分辨率
double angle_increment = tf2::getYaw(inc_q.quaternion) - angle_min;
// wrapping angle to [-pi .. pi] 约束角度在[-pi,pi]之间
angle_increment = fmod(angle_increment + 5*M_PI, 2*M_PI) - M_PI;
//这里报告激光多少个角度在base_link坐标系下,最小角度为 ,角分辨率为
ROS_DEBUG("Laser %d angles in base frame: min: %.3f inc: %.3f", laser_index, angle_min, angle_increment);
//设置激光探测范围最小/最大阈值
// Apply range min/max thresholds, if the user supplied them
if(laser_max_range_ > 0.0)
ldata.range_max = std::min(laser_scan->range_max, (float)laser_max_range_);
else
ldata.range_max = laser_scan->range_max;
double range_min;
if(laser_min_range_ > 0.0)
range_min = std::max(laser_scan->range_min, (float)laser_min_range_);
else
range_min = laser_scan->range_min;
//AMCLLaserData析构函数将会释放内存
// The AMCLLaserData destructor will free this memory
//为观测模型数据ldata存储探测范围的数组分配内存
ldata.ranges = new double[ldata.range_count][2];
ROS_ASSERT(ldata.ranges);
//遍历ldata的探测范围的数组
for(int i=0;i<ldata.range_count;i++)
{
// amcl doesn't (yet) have a concept of min range. So we'll map short
// readings to max range.
if(laser_scan->ranges[i] <= range_min)
ldata.ranges[i][0] = ldata.range_max;
else
//将实际laser_scan探测的距离数组一一赋值给观测模型数据ldata
ldata.ranges[i][0] = laser_scan->ranges[i];
// Compute bearing 计算探测的距离对应的角度
ldata.ranges[i][1] = angle_min +
(i * angle_increment);
}
//使用观测模型的ldata更新粒子滤波器
lasers_[laser_index]->UpdateSensor(pf_, (AMCLSensorData*)&ldata);
//将lasers_update_的更新符号置为false
lasers_update_[laser_index] = false;
//将pose的值赋给pf_odom_pose_
pf_odom_pose_ = pose;
// Resample the particles 重采样粒子
if(!(++resample_count_ % resample_interval_))
{
pf_update_resample(pf_);//这里使用的是pf_update_resample(pf_);也就是KLD采样算法
//将已重采样标识符置为true
resampled = true;
}
//新建粒子sample集set,来自于pf_
pf_sample_set_t* set = pf_->sets + pf_->current_set;
ROS_DEBUG("Num samples: %d\n", set->sample_count);
// Publish the resulting cloud 发布粒子云
// TODO: set maximum rate for publishing
if (!m_force_update) //如果强制更新为false
{
geometry_msgs::PoseArray cloud_msg;//新建cloud_msg
cloud_msg.header.stamp = ros::Time::now();
cloud_msg.header.frame_id = global_frame_id_;
//根据粒子sample集的sample数目 resize cloud_msg的尺寸
cloud_msg.poses.resize(set->sample_count);
for(int i=0;i<set->sample_count;i++) //遍历粒子sample集set
{
cloud_msg.poses[i].position.x = set->samples[i].pose.v[0];
cloud_msg.poses[i].position.y = set->samples[i].pose.v[1];
cloud_msg.poses[i].position.z = 0;
tf2::Quaternion q;
q.setRPY(0, 0, set->samples[i].pose.v[2]);
tf2::convert(q, cloud_msg.poses[i].orientation);
}
//发布粒子云
particlecloud_pub_.publish(cloud_msg);
}
}8.如果已经重采样或者强制发布
已经重采样后或者是强制发布,这时候就要发布AMCL包经历粒子滤波算法估计出的世界坐标系下的机器人位姿p。如何选出呢?选出拥有最大权重的粒子sample簇,并将这个簇的均值赋给位姿p的位姿x,y,yaw,将粒子sample集的协方差赋给位姿p的协方差。
if(resampled || force_publication) //如果已经重采样 或者强制发布
{
// Read out the current hypotheses 读取当前的假设
double max_weight = 0.0;
int max_weight_hyp = -1;
std::vector<amcl_hyp_t> hyps;//设置位姿假设
//根据pf_当前set的簇数目:cluster_count
hyps.resize(pf_->sets[pf_->current_set].cluster_count);
for(int hyp_count = 0;
//这里要遍历pf_当前set的cluster_count
hyp_count < pf_->sets[pf_->current_set].cluster_count; hyp_count++)
{
double weight;
pf_vector_t pose_mean;
pf_matrix_t pose_cov;
//好好注意pf_get_cluster_stats函数,在pf.cpp里
if (!pf_get_cluster_stats(pf_, hyp_count, &weight, &pose_mean, &pose_cov))
{
ROS_ERROR("Couldn't get stats on cluster %d", hyp_count);
break;
}
hyps[hyp_count].weight = weight;
hyps[hyp_count].pf_pose_mean = pose_mean;
hyps[hyp_count].pf_pose_cov = pose_cov;
if(hyps[hyp_count].weight > max_weight)
{
max_weight = hyps[hyp_count].weight;
max_weight_hyp = hyp_count;//得到拥有最大权重的cluster
}
}
if(max_weight > 0.0)
{
ROS_DEBUG("Max weight pose: %.3f %.3f %.3f",
hyps[max_weight_hyp].pf_pose_mean.v[0],
hyps[max_weight_hyp].pf_pose_mean.v[1],
hyps[max_weight_hyp].pf_pose_mean.v[2]);
/*
puts("");
pf_matrix_fprintf(hyps[max_weight_hyp].pf_pose_cov, stdout, "%6.3f");
puts("");
*/
geometry_msgs::PoseWithCovarianceStamped p;//设置位姿 p
// Fill in the header
p.header.frame_id = global_frame_id_;
p.header.stamp = laser_scan->header.stamp;
// Copy in the pose
//将拥有最大权重的簇的位姿的均值读取出来
p.pose.pose.position.x = hyps[max_weight_hyp].pf_pose_mean.v[0];
p.pose.pose.position.y = hyps[max_weight_hyp].pf_pose_mean.v[1];
tf2::Quaternion q;
q.setRPY(0, 0, hyps[max_weight_hyp].pf_pose_mean.v[2]);
tf2::convert(q, p.pose.pose.orientation);
// Copy in the covariance, converting from 3-D to 6-D
//从粒子滤波器中取出粒子sample集,再新建一个粒子sample集
pf_sample_set_t* set = pf_->sets + pf_->current_set;
for(int i=0; i<2; i++)
{
for(int j=0; j<2; j++)
{
// Report the overall filter covariance, rather than 而不是 the
// covariance for the highest-weight 最高权重的簇 cluster
//p.covariance[6*i+j] = hyps[max_weight_hyp].pf_pose_cov.m[i][j];
p.pose.covariance[6*i+j] = set->cov.m[i][j];//将粒子sample集的协方差取出来
}
}
// Report the overall filter covariance, rather than the
// covariance for the highest-weight cluster
//p.covariance[6*5+5] = hyps[max_weight_hyp].pf_pose_cov.m[2][2];
p.pose.covariance[6*5+5] = set->cov.m[2][2];//将粒子sample集的协方差取出来
pose_pub_.publish(p);//把位姿p发布出去
last_published_pose = p;//并把发布出去的这个位姿p作为last_published_pose
ROS_DEBUG("New pose: %6.3f %6.3f %6.3f",
hyps[max_weight_hyp].pf_pose_mean.v[0],
hyps[max_weight_hyp].pf_pose_mean.v[1],
hyps[max_weight_hyp].pf_pose_mean.v[2]);
//注意tf转换关系
// subtracting base to odom(odom_base) from map to base(base_map) and send map to odom(odom_map) instead
geometry_msgs::PoseStamped odom_to_map;
try
{
tf2::Quaternion q;
q.setRPY(0, 0, hyps[max_weight_hyp].pf_pose_mean.v[2]);
tf2::Transform tmp_tf(q, tf2::Vector3(hyps[max_weight_hyp].pf_pose_mean.v[0],
hyps[max_weight_hyp].pf_pose_mean.v[1],
0.0));//世界坐标系下的
geometry_msgs::PoseStamped tmp_tf_stamped;//base_link坐标系下的
tmp_tf_stamped.header.frame_id = base_frame_id_;
tmp_tf_stamped.header.stamp = laser_scan->header.stamp;
tf2::toMsg(tmp_tf.inverse(), tmp_tf_stamped.pose);
this->tf_->transform(tmp_tf_stamped, odom_to_map, odom_frame_id_);
}
catch(tf2::TransformException)
{
//报错:将base->odom的转换失败!
ROS_DEBUG("Failed to subtract base to odom transform");
return;
}
tf2::convert(odom_to_map.pose, latest_tf_);
//这里将latst_tf_valid置为true
latest_tf_valid_ = true;
//如果tf_broadcast为真
if (tf_broadcast_ == true)
{
// We want to send a transform that is good up until a
// tolerance time so that odom can be used
ros::Time transform_expiration = (laser_scan->header.stamp +
transform_tolerance_);
geometry_msgs::TransformStamped tmp_tf_stamped;
tmp_tf_stamped.header.frame_id = global_frame_id_;//父坐标系:map坐标系
tmp_tf_stamped.header.stamp = transform_expiration;
tmp_tf_stamped.child_frame_id = odom_frame_id_;//子坐标系:odom坐标系
tf2::convert(latest_tf_.inverse(), tmp_tf_stamped.transform);
//发布odom->map的转换关系,由tmp_tf_stamped表示
this->tfb_->sendTransform(tmp_tf_stamped);
sent_first_transform_ = true;
}
}
else
{
ROS_ERROR("No pose!");
}
}9.如果最新的tf存在的话
else if(latest_tf_valid_)
{
if (tf_broadcast_ == true)
{
//什么也没改变,只是再次发布最后一次转换
// Nothing changed, so we'll just republish the last transform, to keep
// everybody happy.
ros::Time transform_expiration = (laser_scan->header.stamp +
transform_tolerance_);
geometry_msgs::TransformStamped tmp_tf_stamped;
tmp_tf_stamped.header.frame_id = global_frame_id_;//世界坐标系map
tmp_tf_stamped.header.stamp = transform_expiration;
tmp_tf_stamped.child_frame_id = odom_frame_id_;//里程计坐标系
tf2::convert(latest_tf_.inverse(), tmp_tf_stamped.transform);
this->tfb_->sendTransform(tmp_tf_stamped);
}
//将最后的位姿存放到Server中,具体使用savePoseToSever函数,this表示AmclNode类实例化的对象
// Is it time to save our last pose to the param server
ros::Time now = ros::Time::now();
if((save_pose_period.toSec() > 0.0) &&
(now - save_pose_last_time) >= save_pose_period)
{
this->savePoseToServer();
save_pose_last_time = now;
}
}10.diagnosic_update_更新
diagnosic_updater_.update();至此,laserReceived函数的源码分析完毕了。激光传感器观测到的数据/里程计模型数据对粒子滤波器洗洗刷刷,选出最大权重的粒子簇,发布唯一的位姿p;经历过重采样后的粒子滤波器,取出其粒子sample集作为粒子云发布;tf2作为坐标系管理工具从头服务到尾,积极算出odom到map的转换,从而维护了完整的tf树:laser->base_link->odom->map.
转自:9.AMCL包源码分析 | amcl_node.cpp (二) - 知乎 (zhihu.com)
posted on 2022-09-14 13:58 tdyizhen1314 阅读(436) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号