

温故知新,机器人进化论,机器人分类与全球格局

机器人硬件只是一个基础,整个系统的核心在于控制算法、路径规划、定位与导航、感知融合、任务调度等。这部分公司往往是“软实力”的主导
机器人的定义和理解
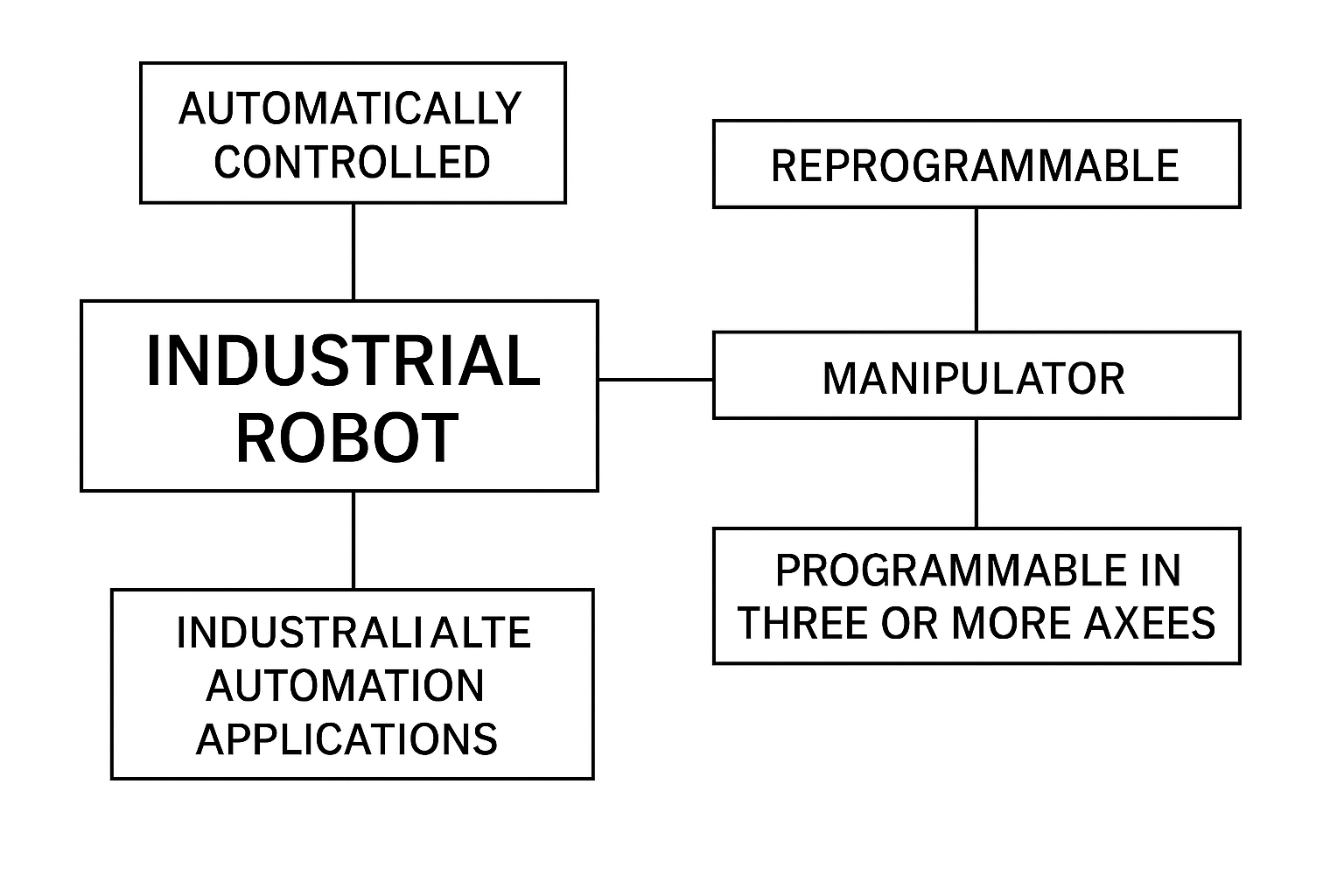
An automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes, which can be either fixed in place or mobile for use in industrial automation applications.
—— ISO 8373:2012
机器人是“可编程、可复用的自动化执行系统”,能在三维空间中自主完成任务,服务于工业自动化。
含义解析
| 关键词 | 中文解释 | 含义解读 |
|---|---|---|
| automatically controlled | 自动控制的 | 机器人不是人工直接操作的,而是通过控制系统(程序、传感器反馈、控制器)自动执行任务。这一点区分了“自动化机械”和“手动操作设备”。 |
| reprogrammable | 可重新编程的 | 可以通过修改程序来执行不同任务,而不是固定功能。换句话说,机器人必须具备一定的通用性与灵活性,不是一次性专机(如专用搬运机械臂)。 |
| multipurpose | 多用途的 | 能够完成不同类型任务(如焊接、搬运、装配),只需更换末端执行器或修改程序即可。体现“通用性”。 |
| manipulator | 操纵器 / 机械臂 | 指具有多个关节或自由度的执行机构,用来完成抓取、移动、装配等物理操作。这里的“manipulator”强调机器人本体的机械运动部分。 |
| programmable in three or more axes | 可在三个或更多轴上编程 | 表示机器人至少应有三自由度(例如三个关节、三个坐标轴),才能完成三维空间中的基本操作。这是“机器人”与“简单自动机”的重要区分标准。 |
| fixed in place or mobile | 可以固定安装,也可以移动 | 说明工业机器人不一定非得是固定机械臂,它可以是移动式(如移动机械臂、无人搬运机器人等)。ISO 标准后来也将移动机器人纳入“工业机器人”的范畴。 |
| for use in industrial automation applications | 用于工业自动化场景 | 最核心的限制条件:它服务于工业生产或制造过程,包括搬运、装配、加工、包装、检测、物流等。 |
结构化理解:ISO 定义的“边界条件”
我们可以把这一定义理解为“五个必要条件 + 一个应用限定”:
| 分类 | 条件 | 说明 |
|---|---|---|
| 控制属性 | 自动控制(Automatically controlled) | 机器人必须能自动运行,而非人工手动操作 |
| 可编程性 | 可重新编程(Reprogrammable) | 任务逻辑可修改 |
| 功能属性 | 多用途(Multipurpose) | 不仅能做一件事 |
| 机械结构 | 多自由度操纵器(Manipulator, ≥3 axes) | 有多个轴 / 关节的机械结构 |
| 空间属性 | 固定或移动(Fixed or Mobile) | 可以安装在地面、轨道或移动平台 |
| 应用范围 | 工业自动化(Industrial Automation) | 服务于工业制造或相关过程 |
举例说明
| 系统类型 | 是否符合 ISO 定义 | 原因 |
|---|---|---|
| 传统 6 轴机械臂(FANUC、ABB、KUKA) | ✅ 是 | 自动控制、多自由度、可编程、多用途、用于工业场景 |
| 无人叉车(AGV/AMR) | ✅ 属于“移动工业机器人” | 移动型、多轴控制、自动运行、可编程,用于物流自动化 |
| 专用贴标机 / 装箱机 | ❌ 否 | 虽自动化,但不可重编程、不具通用性 |
| 遥控机械臂(需人工控制) | ❌ 否 | 非自动控制,依赖人工操作 |
| 家用扫地机器人 | ❌ 否 | 虽是机器人,但应用场景非“工业自动化” |
6轴机械臂
“6轴机械臂”是工业机器人中最典型、最常见的结构形式。所谓“6轴”,指的是机器人本体具有6个可独立控制的旋转自由度(Revolute Joint),这6个关节通常模拟了人类手臂从肩到腕的6种主要运动,使机器人末端(通常是夹爪或焊枪)可以在三维空间中实现任意位置与姿态。
6轴机械臂的结构概念
| 部分 | 轴号 | 名称 | 功能 | 类比人体部位 |
|---|---|---|---|---|
| 基座/躯干部分(Position axes) | 1轴 | 底座回转轴(Base Rotation / Waist) | 控制机械臂左右旋转(绕垂直方向转动) | 腰部左右转 |
| 2轴 | 大臂俯仰轴(Shoulder Pitch) | 控制整个臂上下摆动(前后俯仰) | 肩膀抬起/下压 | |
| 3轴 | 小臂伸缩轴(Elbow Pitch) | 控制前臂伸展或收回 | 手肘弯曲 | |
| 腕部部分(Orientation axes) | 4轴 | 腕部回转轴(Wrist Roll / Yaw) | 控制腕部水平旋转(绕前臂轴线) | 手腕扭动 |
| 5轴 | 腕部俯仰轴(Wrist Pitch) | 控制腕部上下摆动 | 手腕上下点头 | |
| 6轴 | 腕部旋转轴(Wrist Roll) | 控制末端执行器自身旋转 | 手腕旋转/转动螺丝动作 |
这样,总共6个旋转自由度(6R结构),能够让机器人末端执行器:
在三维空间中实现 三维位置 + 三维姿态(即6维位姿)的全控制。
6轴的几何意义(位姿自由度)
在空间中,任何一个刚体的位置与姿态,用六个变量描述:
位置(3个自由度):X、Y、Z
姿态(3个自由度):Roll(滚转)、Pitch(俯仰)、Yaw(偏航)
6轴机械臂的6个关节正好提供这6个自由度,因此能实现“任意空间点 + 任意方向”的操作
常见6轴机械臂的结构示意

大多数工业机械臂(如 FANUC M-10iA、ABB IRB 2600、KUKA KR6、安川 GP系列)都遵循类似结构
(6) Wrist roll ← 末端执行器方向调整
(5) Wrist pitch
(4) Wrist yaw
|
| ← 前臂
(3) Elbow pitch
|
(2) Shoulder pitch
|
(1) Base rotation
[底座]
前三轴用于“伸展位置”,后三轴用于“姿态调整”。
为什么是“6轴”而不是“更多”
6轴是实现全空间自由运动的最小自由度数。
(少于6轴将无法同时控制位置和姿态。)
7轴或以上(如协作机器人 / 人形机械臂)增加了“冗余自由度”,
可实现更顺畅路径、避障优化或冗余姿态选择。
但控制算法更复杂,成本更高。
为什么强调 “Reprogrammable” 和 “Multipurpose”
这两个词是 “工业机器人” 与 “专用自动化设备” 的分界线。
专用自动机:只能做一个固定动作,比如自动封箱机、自动锁螺丝机。
工业机器人:同样的硬件,可以通过更换程序 + 工装,执行不同任务。
➡️ 可编程 + 多用途 = 通用机器人平台。
这也是机器人产业区别于传统自动化机械的关键。
机器人基本概念与范畴
“机器人”是一个比较宽泛的概念,不同文献和标准下的定义稍有差异。一般来说,机器人是能感知环境、作出决策或规划、并作用于环境的机械系统(带有驱动、传感、控制、算法等)的一类设备。
在工业标准(如ISO、国际机器人联合会 IFR 等)里,常把“工业机器人”作为一个子类专门讨论。
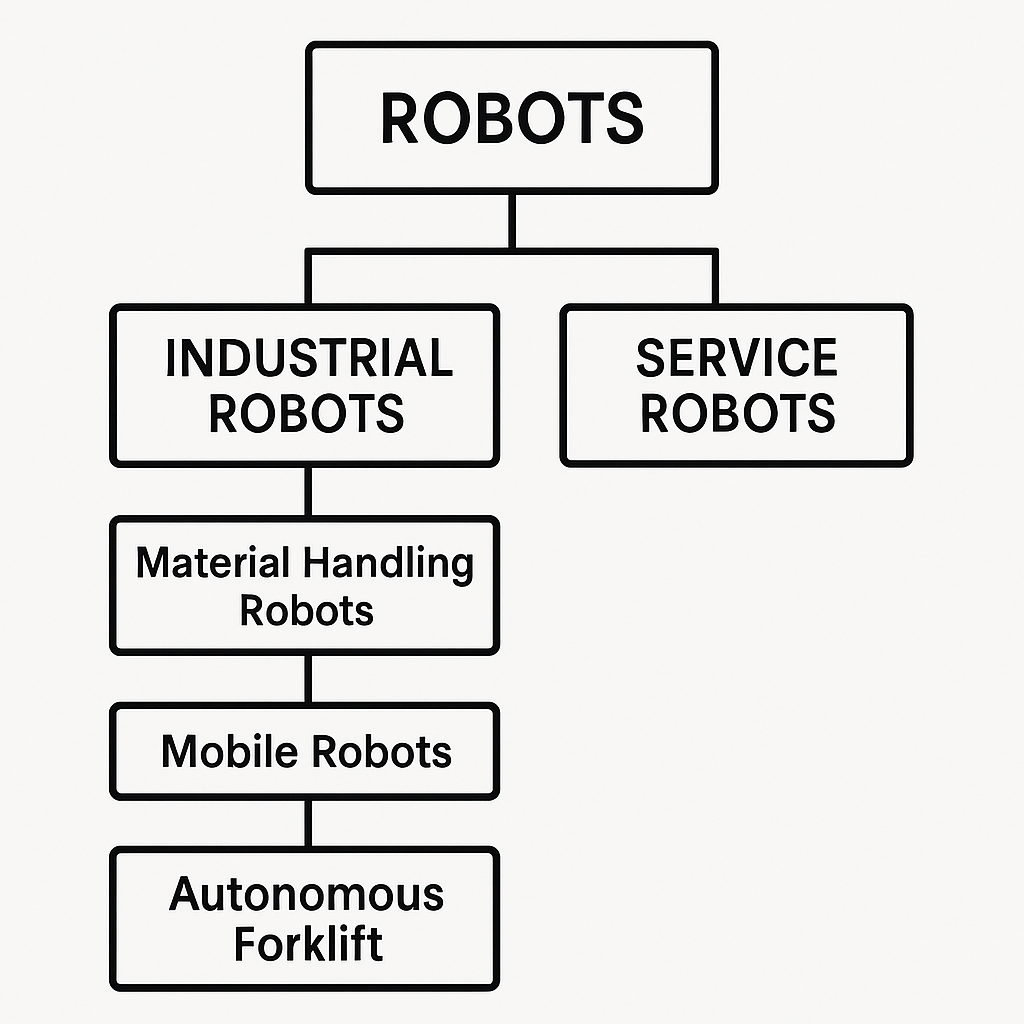
从应用维度看,可以把机器人粗略分为两大类:
| 大类 | 含义 / 特征 | 举例 / 应用领域 |
|---|---|---|
| 工业机器人(Industrial Robots) | 用在工厂、车间等生产线上的机器人,用于搬运、装配、焊接、喷涂、堆垛等任务 | 机械臂、焊接机器人、自动化装配线机器人等 |
| 服务机器人(Service Robots) | 面向非工业场景,用于为人服务或协助完成任务 | 医疗机器人、农业机器人、配送机器人、家用扫地机器人等 |
在服务机器人这一档下面,又可以细分为“个人/家庭用机器人(Personal / Domestic Robots)”和“专业服务机器人(Professional / Institutional Robots)”
此外,机器人也常按多维属性来分类:机械结构、运动形式、驱动方式、感知与智能能力、移动与静止、协作能力等。
无人叉车在机器人领域的归类
无人叉车(Autonomous Forklift)在机器人分类体系中,其实是一个跨界的典型代表,既属于移动机器人(Mobile Robot)大类,又有工业机器人的属性
机器人分类维度与主要类别
下面是几种常见的分类维度及对应的主要类别(或子类)。理解这些分类,有助于你在做无人叉车、移动机器人这类方向时把握技术路线。
1. 结构/运动学分类(机械结构 + 自由度 + 作业空间)
这是工业机器人分类中最常见的视角。
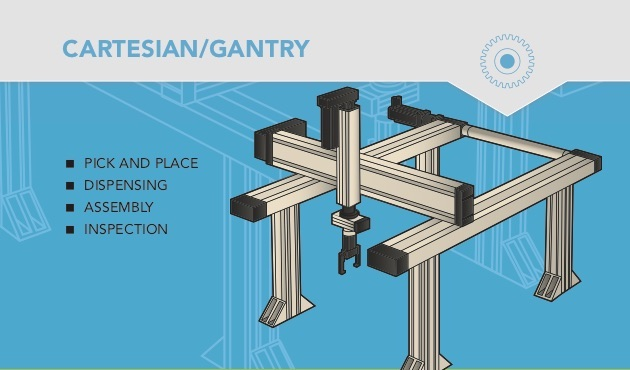
- 笛卡尔机器人 / 直角坐标机器人(Cartesian / Gantry / Rectangular robot)
- 三个线性关节(X、Y、Z 方向移动),作业空间为直角框体。适合于搬运、三轴加工、3D 打印、装配线等场景。
- SCARA 机器人
- Selective Compliance Assembly Robot Arm,典型的是“在一个平面上软、垂直方向刚”的结构,适合平面内抓取、装配任务
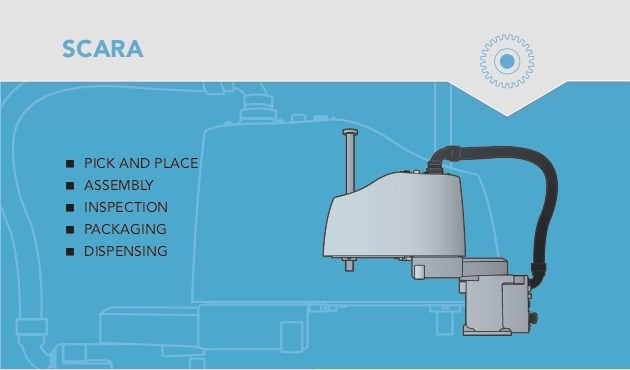
- Selective Compliance Assembly Robot Arm,典型的是“在一个平面上软、垂直方向刚”的结构,适合平面内抓取、装配任务
- 关节型 / 多关节 / 机械臂(Articulated / Multi-joint)
- 由多个旋转关节组成(通常 4、5、6+ 个自由度),可以实现较灵活的空间动作,是工业机器人中最常见的一类
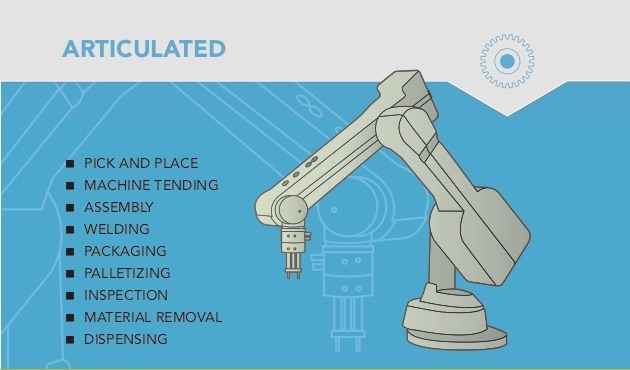
- 由多个旋转关节组成(通常 4、5、6+ 个自由度),可以实现较灵活的空间动作,是工业机器人中最常见的一类
- 并联 / Delta / 平行机器人(Parallel / Delta Robot)
- 结构上多个支链并联支持末端平台运动,通常具有较高刚性、高速性,适合高速拣选 / 分拣 / 贴片 / 取放等任务
- 结构上多个支链并联支持末端平台运动,通常具有较高刚性、高速性,适合高速拣选 / 分拣 / 贴片 / 取放等任务
- 极坐标 / 球坐标 / 极型机器人(Polar / Spherical robot)
- 利用转动 + 径向伸缩 /俯仰运动等组合,作业空间为球面或弧面空间。适用于某些特殊抓取 / 伸展需求场景
- 圆柱坐标机器人(Cylindrical robot)
- 通常有一个绕轴旋转关节 + 一个径向伸缩关节 + 一个线性(垂直)关节。作业空间是柱体区域
- 协作机器人 / 轻量机器人(Collaborative Robots, Cobots)
- 这一类机器人的结构可能是关节型、SCARA 或其他,但设计上增加安全性、力觉控制、低惯量,允许与人共存或近距离合作。其本质上也是一种“工业机器人”家族中的一个子类
2. 移动性:静止 vs 移动机器人
- 固定式机器人 / 机械臂:安装在固定位置,不移动,仅在本地执行任务(典型的工业机器人)。
- 移动机器人 / 自主移动机器人(AMR, Autonomous Mobile Robot):带有轮式、履带、或其他移动机制,能在环境中自主导航、避障、执行路径跟踪。用于仓储、物流、巡检、配送等场景。
- 引导车 / 自动导引车(AGV, Automated Guided Vehicle):一种比较传统的移动机器人,通常沿固定轨迹或特定导引路径行驶(磁条、线、激光、二维码引导等)。相比 AMR,AGV 的灵活性较低。
- 混合 / 半移动型机器人:某些机器人在本地具备移动能力,又有摆臂等结构;或者机械臂+移动平台组合。
3. 驱动方式 / 动力源分类
机器人常见的驱动方式包括:
-
电驱动(Electric):电机 + 减速器,是最常见和最灵活的驱动方式
-
液压驱动(Hydraulic):在高负载、高功率应用中使用(如大型机械)
-
气压驱动(Pneumatic):适合于较轻负载、快速气动动作、对精度要求不高的场景
-
混合 / 柔性驱动:某些软体机器人、仿生机器人可能用到柔性驱动、形状记忆合金驱动、压电驱动等
驱动方式影响响应速度、控制精度、安全性、功率密度、能耗、结构复杂性等。
4. 智能 / 控制 /感知层级分类
从系统能力的角度,也可以按智能、自动化和感知能力来分类:
-
传统机器人 / 预定轨迹机器人:运行预设程序、路径,反馈少或无自适应
-
感知 + 声明机器人:带传感器(视觉、激光雷达、距离传感器等),可以感知周边、调整行为
-
学习 / 自适应机器人 / 智能机器人:具备机器学习、环境建模、在线决策、自主规划能力
-
协作 / 人机交互机器人:设计上考虑人与机器人的交互、安全共存、柔性操作能力
-
群体 / 群集机器人(Swarm Robotics):多个机器人协同作业,通过分布式控制或群体智能方式完成任务
5. 应用场景 /功能分类
依据用途和应用领域,也可进行分类,比如:
-
搬运 / 物流机器人
-
装配 / 加工 / 机床机器人
-
焊接 / 打磨 / 喷涂机器人
-
检验 / 视觉 / 测试机器人
-
服务 / 医疗机器人
-
巡检 / 教育 /娱乐 /科研机器人
全球机器人产业格局与趋势
市场规模与增长
- 据统计,2024 年全球工业机器人在用数量已达约 4,664,000 台,同比增长约 9%(较上一年)。
- 年度新增机器人装机数在 2024 年为约 54.1 万台(或接近该水平)
- 工业机器人市场预计从 2025 年起以约 9.9% 的年复合增长率增长,到 2030 年将达到约 US$ 60,562 Million(即 ~605.62 亿美元)
- 服务机器人(尤其是专业服务机器人)市场被看作增长潜力更大的一块。全球服务机器人市场预计 2025 年约 62.85 亿美元,2034 年可能达到 ~212.77 亿美元,年均增长率约 15%
- 整体机器人(含工业 + 服务 + 智能机器人)市场预测更为激进。一些报告认为,机器人市场从数十亿美元规模将增长至 2030 年的 160–260 十亿美元或更高水平
- 根据 ABI Research,机器人市场在 2025 年估算约 500 亿美元,预计到 2030 年可达 1,110 亿美元,年复合增长率 ~14%
总体看,机器人产业是一个仍在快速发展的领域,尤其是随着 AI、传感器、计算能力、软件算法进步的推动
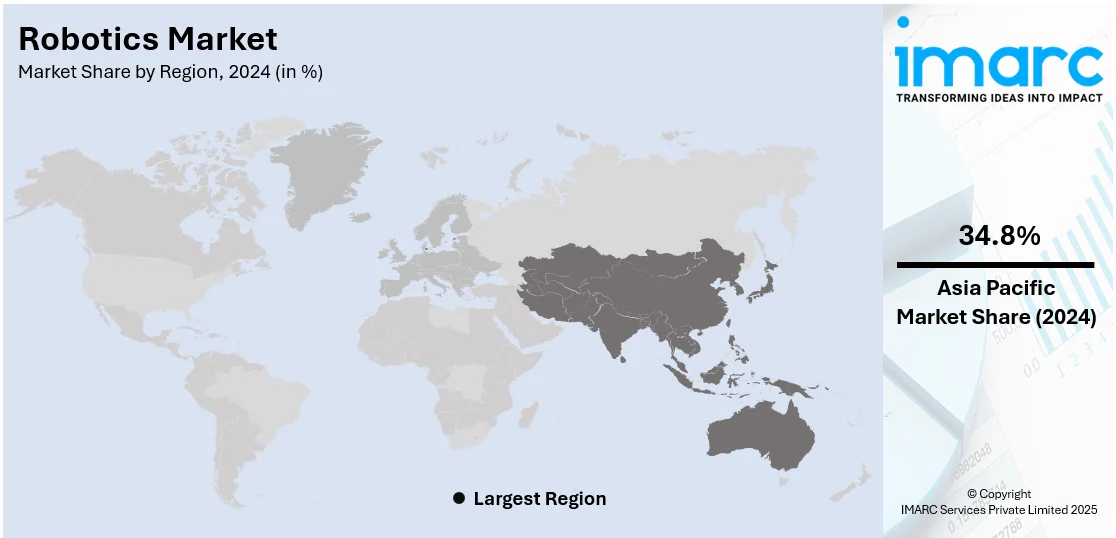
区域格局与主要市场
- 亚洲 / 亚太 是机器人产业的最重要地区之一,特别是中国、日本、韩国的制造业基础强、自动化需求高。这些国家在工业机器人市场的装机量、使用密度、机器人研究和制造能力方面都处于前列。

- 中国在工业机器人装机中占据极高比例。根据报道,中国在 2024 年工业机器人装机量约占全球的一大块
- 欧洲、北美也是机器人技术、创新、整合和应用的重镇。德国、日本、美国在工业机器人、控制系统、软件平台、关键部件(伺服电机、减速器、传感器)等方面具有强实力
- 服务机器人在发达国家(北美、欧洲、日本等)应用率更高,尤其在医疗、物流、智慧城市、零售等场景推动快
- 在新兴市场(印度、东南亚等),随着制造业升级、劳动力成本上升、政策支持、基础设施改善,机器人渗透率正快速提升
主要厂商 / 竞争格局
机器人产业是一个技术密集、资本密集且对供应链、零部件、算法、系统集成能力要求极高的行业。常见的参与者与竞争方向如下
-
传统工业机器人厂商:FANUC(日本)、ABB(瑞士/瑞典/瑞士-瑞典组合)、KUKA(德国)、Yaskawa(日本)等,他们在机械臂、底层控制器、伺服驱动、机器人整机有深厚积累。
-
协作机器人厂商 / 新型自动化公司:如 Universal Robots(丹麦)、Rethink Robotics(已被收购/退出)、一些新兴国内外协作机器人厂商。
-
移动机器人 / 物流机器人厂商:在仓储 / 物流 / 自动导引车(AGV)/自主搬运机器人(AMR)方向的公司也很多。
-
软件 / 控制 / 视觉 /算法 /AI 公司:机器人硬件只是一个基础,整个系统的核心在于控制算法、路径规划、定位与导航、感知融合、任务调度等。这部分公司往往是“软实力”的主导。
-
系统集成商 / 方案商:很多机器人项目最终需要在特定场景中做整合,例如无人叉车 + 仓储管理系统 + 排程调度系统,这就需要系统集成商做上下游对接。
-
新型跨界玩家:由于 AI、大模型、芯片、传感器技术的发展,一些原本在 AI、自动驾驶、无人驾驶、无人机、物流领域的公司也进入“机器人”领域,带来交叉融合的可能性。
最近的一个例子是 SoftBank 收购 ABB 的机器人部门,以强化其在机器人 / 物理 AI 领域的布局
技术趋势与挑战
在机器人领域未来发展中,有几个关键趋势和挑战值得你特别关注
趋势
-
自主性与智能化提升
- 导航、定位、路径规划、避障、在线决策能力不断增强。越来越多的机器人从“被动执行”转向“自主执行 + 协调执行”。
-
软硬件协同 / 模块化 / 可扩展性
- 硬件(结构、驱动、传感)和软件(算法、控制、中间件)协同设计;模块化架构便于扩展和平台化。
-
多传感融合 / 感知能力加强
- 激光雷达、视觉相机、深度相机、惯性传感器、超声波、毫米波等多模态融合,用以提高环境理解与动态响应能力。
-
协作/人机安全共存
- 特别是在和人共存的场景中,安全控制、力觉控制、碰撞检测、柔性设计等成为重要要求。
-
云端 + 边缘计算融合
- 大量运算可以在云端或边缘节点完成,机器人端负责实时感知与执行。
-
调度 / 多机器人协同 / 编队 / 任务分配
- 在大型仓库 / 物流中心,无人叉车/AGV/AMR 群体协同是常见需求。
-
低成本化 / 普及化
- 随着技术成熟和规模化,单位机器人成本不断下降,更容易普及至中小企业。
挑战
-
环境复杂性 / 动态性:真实仓库 / 厂房环境可能存在复杂障碍、混杂人员/车辆、物料随时变化,增大路径规划和避障难度。
-
鲁棒性与可靠性:机器人系统在长时间运作中要稳定、容错、易维护、抗干扰。
-
安全性 & 法规 / 标准:在人机共存、公共环境中,要保证安全;不同国家/地区有不同的安全标准、认证要求。
-
定位与地图构建:高精度定位(如厘米级甚至毫米级)在室内环境下是个挑战;地图更新、动态地图处理很重要。
-
能源 / 电池 / 驱动效率:长续航、快充、轻量化是重要方向。
-
系统集成 / 端到端解决方案能力:往往不是某个单点技术领先就能成功,而是软硬件加业务流程加系统调度能力的融合。
-
生态 / 标准 /兼容性:不同行业、不同厂商的机器人之间、机器人和上层业务系统之间的兼容、通信标准、互操作性等问题
特别有用的知识路线建议
-
基础数学 / 线性代数 / 最优化 / 概率统计 / 控制理论 / 机器人学基础
- 理解运动学(正/逆运动学)、动力学、控制、轨迹规划、线性 / 非线性控制、最优化基础。
-
传感器与感知
- 激光雷达 / LiDAR、深度相机 / RGB-D、惯性测量单元(IMU)、超声波传感器、视觉(相机 / 立体 / RGB-D)、SLAM(同步定位与地图构建)技术。
-
定位与导航算法
- SLAM / Lidar SLAM / Visual SLAM / LiDAR+视觉融合;里程计 / 惯性导航 / 状态估计(滤波、卡尔曼滤波 / 扩展 / 粒子滤波等)。
-
路径规划与避障
- 全局路径规划(A, D, Dijkstra, RRT, PRM 等)、局部避障(动态避障、弹性带、基于模型预测控制 MPC 等)。
-
运动控制与轨迹跟踪
- 控制运动学模型、控制策略(PID、前馈 + 反馈控制、模型预测控制、轨迹跟踪算法)、速度与加速度限制、控制器实现细节。
-
多机器人调度 / 编队 / 任务分配
- 在多叉车 / 多机器人系统中,如何做任务调度、路径协调、冲突避免、队列规划等。
-
软硬件接口 / 嵌入式系统 /实时控制
- 机器人中控制器、驱动器、通信总线(CAN、EtherCAT、ROS2 等)、实时操作系统、嵌入式软件开发。
-
系统集成 / 中间件 / ROS / Robot Frameworks
- 学习机器人中间件(如 ROS / ROS2、DDS、ROS 控制器架构、节点设计、消息传输、参数管理等)。
-
安全 / 容错 / 故障诊断 / 可靠性设计
- 设计对异常情况的处理、硬件故障保护、软件异常检测与恢复机制。
-
行业知识 / 业务流程理解
- 仓储 / 物流 / 供应链 / 叉车操作 / 仓库布局 / 业务调度流程等,这部分业务背景对你把技术落地至关重要。
参考资料
- Industrial robots - definition and classification
- Industrial_Robots_2016_Chapter_1_2.pdf
- Robotics Market Size, Share, Trends and Forecast by Product Type and Region, 2025-2033
- 优傲机器人贸易(上海)有限公司
- Rethink Robotics
- SoftBank to buy ABB's robot business for $5.4 billion in push to merge AI and robotics
- 孙正义豪掷382亿,抄底全球机器人巨头

 浙公网安备 33010602011771号
浙公网安备 33010602011771号