
无约束条件的最优控制问题
设函数 \(x(t)\) 在 \([t_0, t_f]\) 区间上连续可到,考虑 Lagrange型性能指标函数 \(J[x(t)]=\displaystyle\int_{t_0}^{t_f}L[x(t), \dot{x}(t), t]dt\)
终端时刻确定的性能指标变分
此时终端时刻 \(t_f\) 是一个确定的数,积分型的性能指标相当于是一个确定上下限的定积分。设宗量函数 \(x(t)\), \(\dot{x}(t)\) 在极值曲线 \(x^*(t)\), \(\dot{x}^*(t)\) 附近发生微小变分 \(\delta \eta(t)\), \(\delta \dot{\eta}(t)\), 其中 \(\eta(t)\) 是一个连续可导的任意定义区间内的函数,即
则泛函 \(J[x(t)]\) 的增量 \(\Delta J[x(t)]\) 可表示为
其中
所以
由泛函极值的必要条件可得,若泛函\(J[x(t)]\) 取得极值,则有\(\delta J=0\), 根据(3)式,若要\(\delta J=0\),则有
以及
上式公式 (4) 称为欧拉-拉格朗日方程, 公式(5)被称为横截条件。
始端,终端状态的固定与否对公式(4)无影响,但会影响公式(5)的具体表达形式,以下分如下四种情况分析模型的边界条件。
1. 始端状态,终端状态固定
此时初始状态 \(x(t_0)=x_0\), \(x(t_f)=x_f\)。则\(\eta(t)|_{t_0}^{t_f}=0\)。则求解时应用给定的边界条件即可,无须横截条件。
2. 始端状态给定,终端状态自由
此时初始状态 \(x(t_0)=x_0\),\(\eta(t_0)=0\). 由\(\eta(t)\) 的任意性, 此时需要 \(\frac{\partial L}{\partial \dot{x}}|_{t_f}=0\)。
3. 始端状态自由,终端状态给定
此时终端状态 \(x(t_f)=x_f\),\(\eta(t_f)=0\). 由\(\eta(t)\) 的任意性, 需要 \(\frac{\partial L}{\partial \dot{x}}|_{t_0}=0\)。
4. 始端状态自由,终端状态自由
此时对于任意的\(\eta(t)\), 在\(t_0\), \(t_f\)两点的取值不定,由\(\eta(t)\) 的任意性, 需要 \(\frac{\partial L}{\partial \dot{x}}|_{t_0}=0\),\(\frac{\partial L}{\partial \dot{x}}|_{t_f}=0\)
总结:求解无约束条件的泛函极值问题时,若给定了边界条件,则直接应用边界条件,若始端或终端状态的条件未给出,则需要使用始端或终端的横截条件进行求解。求解条件如下表所示:
| 边界条件 | 满足方程:欧拉-拉格朗日方程 | |
|---|---|---|
| 始端固定,终端固定 | \(x(t_0)=x_0, x(t_f)=x_{t_f}\) | \(\frac{\partial L}{\partial x}-\frac{d}{dt}(\frac{\partial L}{\partial \dot{x}})=0\) |
| 始端固定,终端自由 | \(x(t_0)=x_0,\frac{\partial L}{\partial \dot{x}}|_{t_f}=0\) | \(\frac{\partial L}{\partial x}-\frac{d}{dt}(\frac{\partial L}{\partial \dot{x}})=0\) |
| 始端自由,终端固定 | \(\frac{\partial L}{\partial \dot{x}}|_{t_0}=0, x(t_f)=x_f\) | \(\frac{\partial L}{\partial x}-\frac{d}{dt}(\frac{\partial L}{\partial \dot{x}})=0\) |
| 始端自由,终端自由 | \(\frac{\partial L}{\partial \dot{x}}|_{t_0}=0,\frac{\partial L}{\partial \dot{x}}|_{t_f}=0\) | \(\frac{\partial L}{\partial x}-\frac{d}{dt}(\frac{\partial L}{\partial \dot{x}})=0\) |
例题
- 初始与终端状态固定
求通过点 \((0,0)\), \((1,1)\) 且使
取极值的最优轨迹。
解:此处 \(L(x(t), \dot{x}(t), t)=x^2+\dot{x}^2\), 性能指标函数相应的欧拉-拉格朗日方程为
则有
即
故求得基解为 \(e^t\), \(e^{-t}\), 则最优轨迹的通解可表示为
其中 \(c_1\) 和 \(c_2\) 都为常数。
将初始条件 \(x(0)=0\) 与终端条件 \(x(1)=1\) 代入方程 (10) 可得:
故而最优轨迹为
- 终端状态不固定
求使得性能指标
取极值的轨迹 \(x^*(t)\), 并要求 \(x^*(0)=0\), 但对 \(x^*(1)\) 没有限制。
解: 此处始端状态给定,终端状态未给定,所以需要用到始端状态相关的边界条件,终端状态相关的横截条件。这里 \(L(x(t), \dot{x}(t), t)=\dot{x}^2+\dot{x}^3\),该性质指标函数对应的欧拉-拉格朗日函数为
以及横截条件
由方程 (11) 可知,\(2\dot{x}+3\dot{x}^2=常数\),则可知 \(x^*(t)\) 为关于 \(t\) 的一次函数,设 \(x^*(t)=at+b\), 则由 \(x^*(0)=0\) 可知 \(b=0\)。由方程(12)可知 $$2a+3a^2=0,\tag{13}$$
解得 \(a=0\) 或 \(a=-\frac{2}{3}\),所以最优轨迹 \(x^*(t)\) 可表示为:
(i) 若 \(a=0\),则 \(x^*(t)=0\);
(ii) 若 \(a=-\frac{2}{3}\),则 \(x^*(t)=-\frac{2}{3}t\).
终端时刻不确定的性能指标变分
此时性能指标函数 \(J[x(t)]=\displaystyle\int_{t_0}^{t_f}L[x(t), \dot{x}(t), t]dt\) 类似于一个变上限的积分函数。
类似于终端时刻确定时,设宗量函数 \(x(t)\), \(\dot{x}(t)\) 在极值曲线 \(x^*(t)\), \(\dot{x}^*(t)\) 附近发生微小变分 \(\delta \eta(t)\), \(\delta \dot{\eta}(t)\), 其中 \(\eta(t)\) 是一个连续可导的任意定义区间内的函数,即
取得状态 \(x^*\) 的时刻为 \(t_f^*\), 状态 \(x(t)\) 对应 时刻 \(t_f\), 设 \(t_f=t_f^*+\delta\xi(t_f^*)\)
则泛函 \(J[x(t)]\) 的增量 \(\Delta J[x^*(t)]\) 可表示为
其中
因此 \(\delta J\) 取得极值的必要条件为:
(1)欧拉-拉格朗日方程:
(2) 横截条件:
通常,无论边界情况如何,泛函极值都必须满足欧拉-拉格朗日方程,只是在不同的情况下会出现不同的边界情况,以下我们分情况进行讨论。
- 给定始端状态与终端状态
![在这里插入图片描述]()
此时 \(x(t_0)=x_0\), \(\eta(t_0)=0\), \(\eta(t_f^*)=0\), \(x(t_f)=x_f\), 则可得边界条件与横截条件为
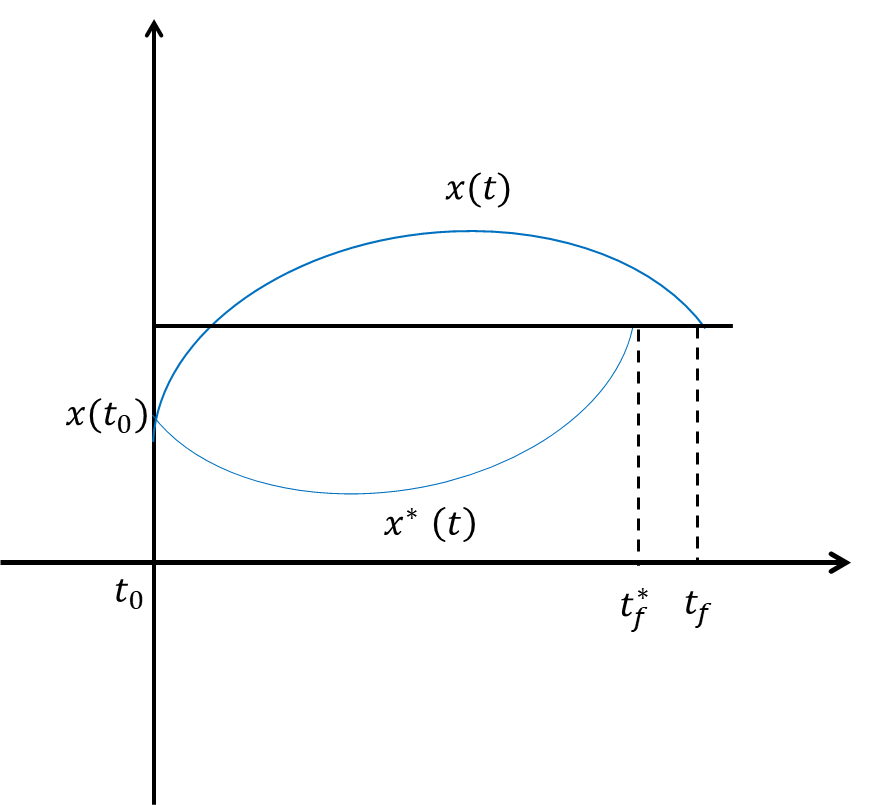
- 始端状态给定,终端状态自由
![在这里插入图片描述]()
此时 \(x(t_0)=x_0\), \(\eta(t_0)=0\), \(\eta(t_f^*)\neq0\), 则可得边界条件与横截条件为
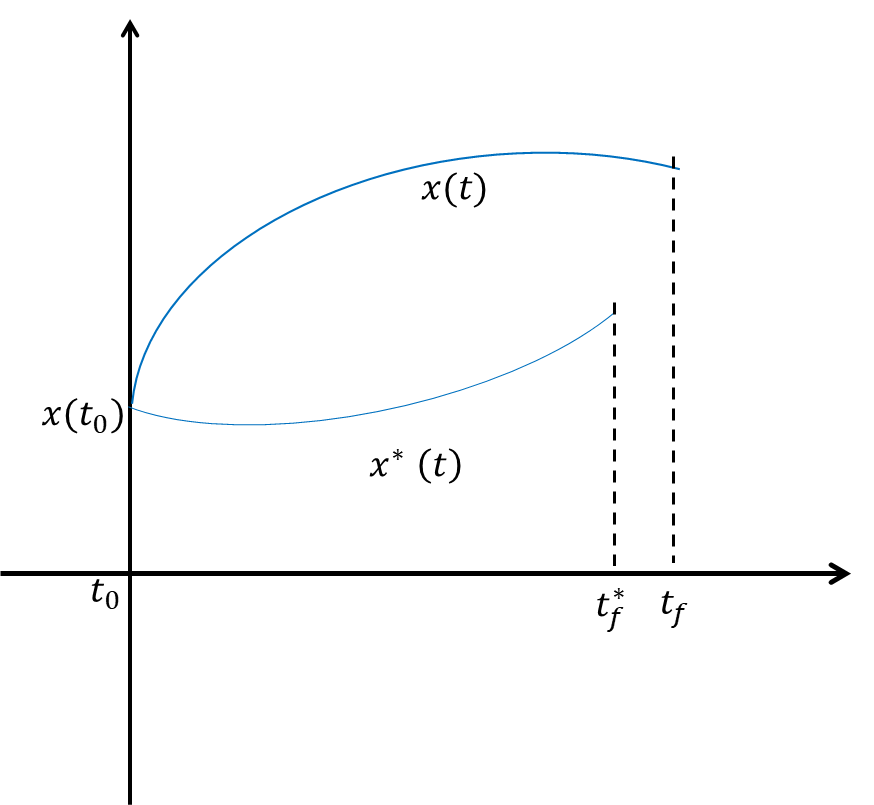
- 始端状态给定,终端状态有约束(要求 \(x(t_f)=C(t_f)\))
![在这里插入图片描述]()
\(x(t)=x^*(t)+\varepsilon\eta(t)\), \(t_f=t_f^*+\varepsilon\xi(t_f^*)\)
则有

上式在 \(\varepsilon=0\) 处取求导可得
则可得边界条件与横截条件为
- 始端状态有约束(要求 \(x(t_0)=\Phi(t_0)\)),终端状态固定
![在这里插入图片描述]()
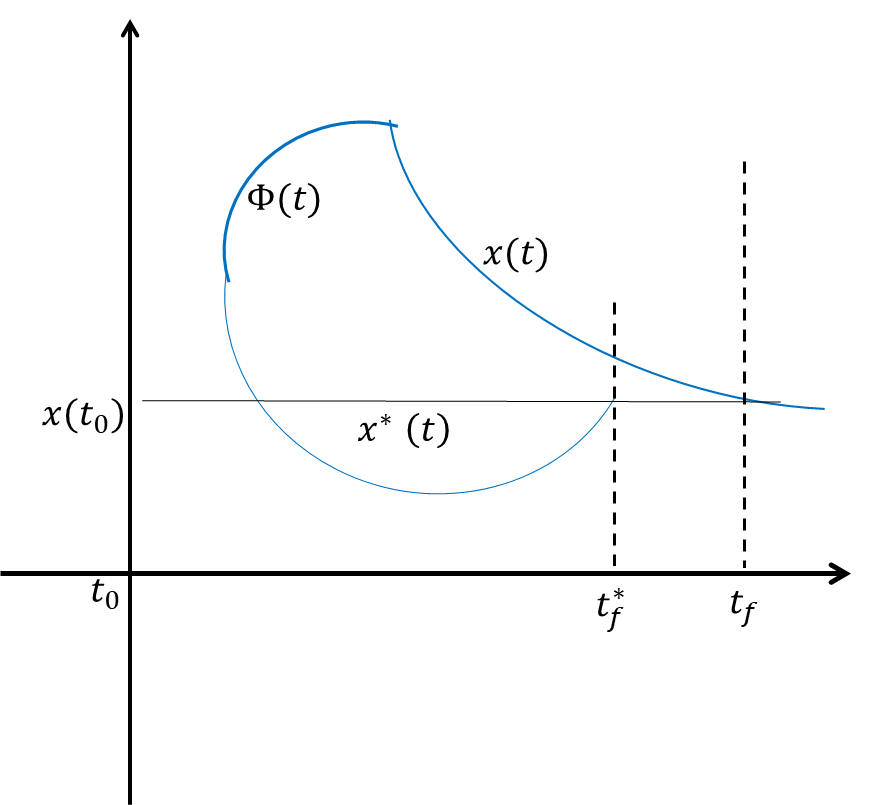
\(x(t)=x^*(t)+\varepsilon\eta(t)\), \(t_0=t_0^*+\varepsilon\xi(t_0^*)\)
则有
上式在 \(\varepsilon=0\) 处取求导可得
则可得边界条件与横截条件为
总结:在终端时刻不确定的条件下,求解无约束条件的泛函极值问题时,若给定了边界条件,则直接应用边界条件,若始端或终端状态的条件未给出,则需要使用始端或终端的横截条件进行求解。求解条件如下表所示:
| 边界条件 | |
|---|---|
| 给定始端状态与终端状态 | \(x(t_0)=x_0, x(t_f)=x_f, L[x(t_f^*), \dot{x}(t_f^*), t_f^*]=0\) |
| 始端状态给定终端状态自由 | \(x(t_0)=x_0\),\(\frac{\partial L}{\partial \dot{x}}|_{t_f^*}=0\),\(L[x(t_f^*), \dot{x}(t_f^*), t_f^*]=0\) |
| 始端状态给定,终端状态有约束(要求 \(x(t_f)=C(t_f)\)) | \(x(t_0)=x_0,x(t_f)=C(t_f),(\dot{C}(t_f^*)-\dot{x}^*(t_f^*))\frac{\partial L}{\partial \dot{x}}|_{t_f^*}+L[x^*(t_f^*), \dot{x}^*(t_f^*),t_f^*]=0\) |
| 始端状态有约束(要求 \(x(t_0)=\Phi(t_0)\)),终端状态固定 | \(x(t_f)=x_f,x(t_0)=\Phi(t_0),(\dot{\Phi}(t_0^*)-\dot{x}^*(t_0^*))\frac{\partial L}{\partial \dot{x}}|_{t_0^*}+L[x^*(t_0^*), \dot{x}^*(t_0^*),t_0^*]=0.\) |
例题
求使性能指标
为极小时的最优轨线 \(x^*(t)\)。设 \(x(0)=1, x(t_f)=C(t_f), C(t_f)=2-t\), \(t_f\) 未给定。
解题思路 本题为无约束条件,始端状态时刻给定,终端状态有约束,终端时刻自由的泛函极值问题。
令 \(L(x,\dot{x},t)=(1+\dot{x}^2)^{\frac{1}{2}}\)。则可得欧拉-拉格朗日方程为
可得
则有
得
即 \(\dot{x}\) 为常数,进而可知 \(x(t)\) 为一次函数形式,设
代入初始条件 \(x(0)=1\) 可得 \(b=1\)。由横截条件
可得
整理可得
由(e6)可知 \(a=0\), 或 \(a=1\) 或 \(a=-1\). 经验算可知 \(a=-1\) 时,不满足终端约束 \(x(t_f)=c(t_f)\),即会有 \(-t_f+1=2-t_f\)。所以\(a=0\), 或 \(a=1\)。
(1)当 \(a=0\) 时,最优轨迹为 \(x(t)=1\), 代入条件 \(x(t_f)=c(t_f)\),得最优时刻为 \(t_f^*=1\)。
(2)当\(a=1\) 时,最优轨迹为 \(x(t)=t+1\), 代入条件 \(x(t_f)=c(t_f)\),得最优时刻为 \(t_f^*=\frac{1}{2}\)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号